A.1 Que fait le logiciel dans un calcul aux éléments finis? Exemple des structures à poutres.
A.1 Que fait le logiciel dans un calcul aux éléments finis? Exemple des structures à poutres.
Cette introduction a pour finalité de montrer, sur un exemple simple, ce qui se cache derrière un calcul statique conduit avec un logiciel EF à barres.
Dans le wiki, par abus de langage, le terme “barre” est souvent employé pour désigner des éléments de type “poutre” et non pas exclusivement des éléments de type “barre” au sens strict (i.e. travaillant uniquement en effort normal).
Quelques rappels :
Le calcul informatique est basé sur une représentation de la structure par un ensemble de barres dont les intersections sont des nœuds. Son but est de déterminer les déplacements des nœuds de la structure, c’est-à-dire les déplacements des abouts des barres, sous les charges appliquées.
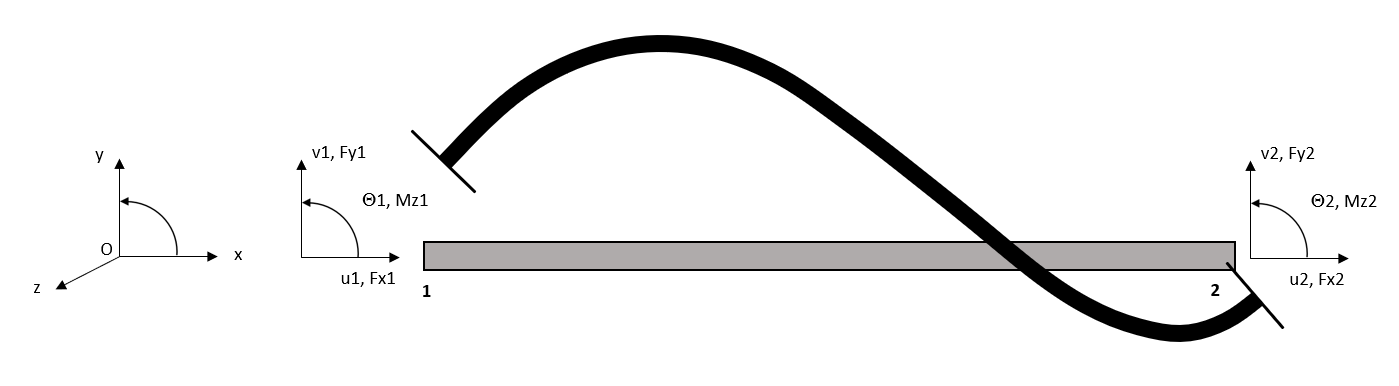 Figure 1 – Convention de signes – efforts et déplacements
Figure 1 – Convention de signes – efforts et déplacements
Les forces aux extrémités de la barre dépendent linéairement des déplacements en ces points. On montre qu’il existe une relation matricielle efforts-déplacements pour une barre reliant deux nœuds i et j, telle que, pour un repère donné, [Kij][qij]=[Fij] (figures 1 et 2), permettant d’exprimer les composantes des vecteurs [Fij] en fonction de celles des vecteurs [qij]. [Kij] est appelée la matrice de raideur de la barre, [Fij] le vecteur des efforts aux nœuds et [qij] le vecteur des déplacements des nœuds.
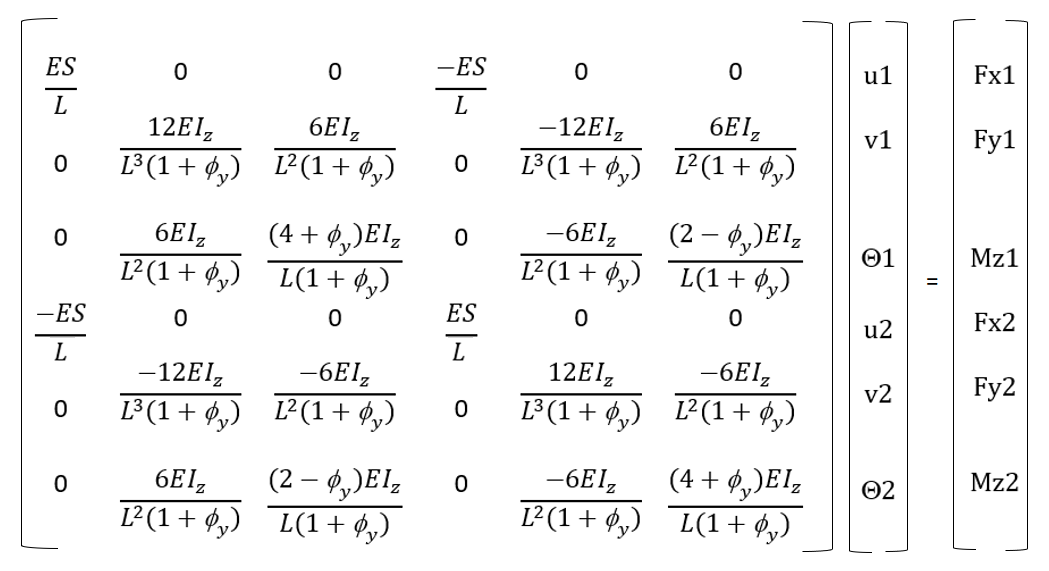 Figure 2 - Matrice de raideur d'une poutre bi-encastrée
Figure 2 - Matrice de raideur d'une poutre bi-encastrée
La matrice [Kij*], associée au repère général, se déduit de la matrice [Kij] exprimée dans le repère local de la barre en lui appliquant une transformée [Λ]T[Kij][Λ] (figure 3), permettant de rendre les déplacements compatibles avec ceux du repère général. [Kij*]=[Λ]T[Kij][Λ] est alors la matrice de raideur de la barre dans le repère général.
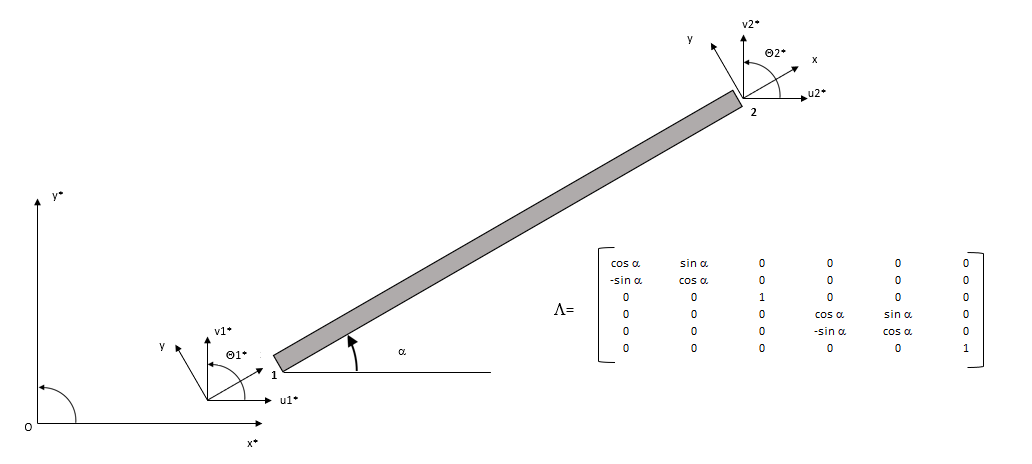 Figure 3 - Rotation des matrices
Figure 3 - Rotation des matrices
Pour calculer les déplacements de tous les nœuds, le logiciel :
-
« assemble » les matrices [Kij*] de chacune des barres pour former la matrice de raideur globale [K] de la structure (figure 4),
-
inverse [K] → [K]-1,
-
multiplie la matrice [K]-1 par celle [F] des efforts extérieurs, préalablement ramenés aux nœuds (s’ils sont appliqués sur une barre ailleurs qu’aux extrémités), dans le repère global, pour calculer le vecteur des déplacements [q].
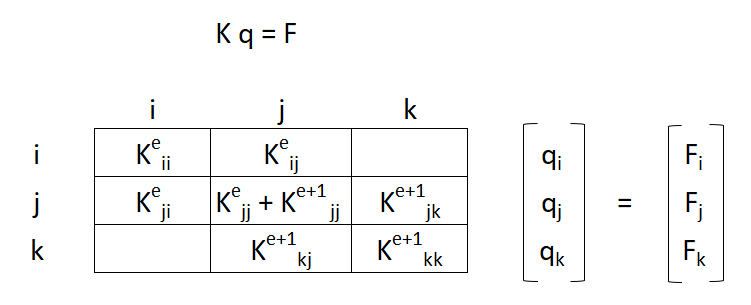 Figure 4 - Principe de l'assemblage
Figure 4 - Principe de l'assemblage
Enfin, pour calculer les efforts internes de la structure, le logiciel multiplie la matrice de raideur [Kij] de chaque barre par le vecteur des déplacements [qij], dans le repère local, aux nœuds i et j. Il obtient ainsi les efforts aux nœuds et les additionne, le cas échéant, aux réactions de la barre bi-encastrée (i.e. les efforts introduits dans le modèle global, mais ici projetés dans le repère local de la barre) - voir le second exemple ci-dessous. Les efforts et déplacements le long des barres se déduisent aisément de ceux des nœuds à l'aide des formules de la RDM.
Application à un exemple simple :
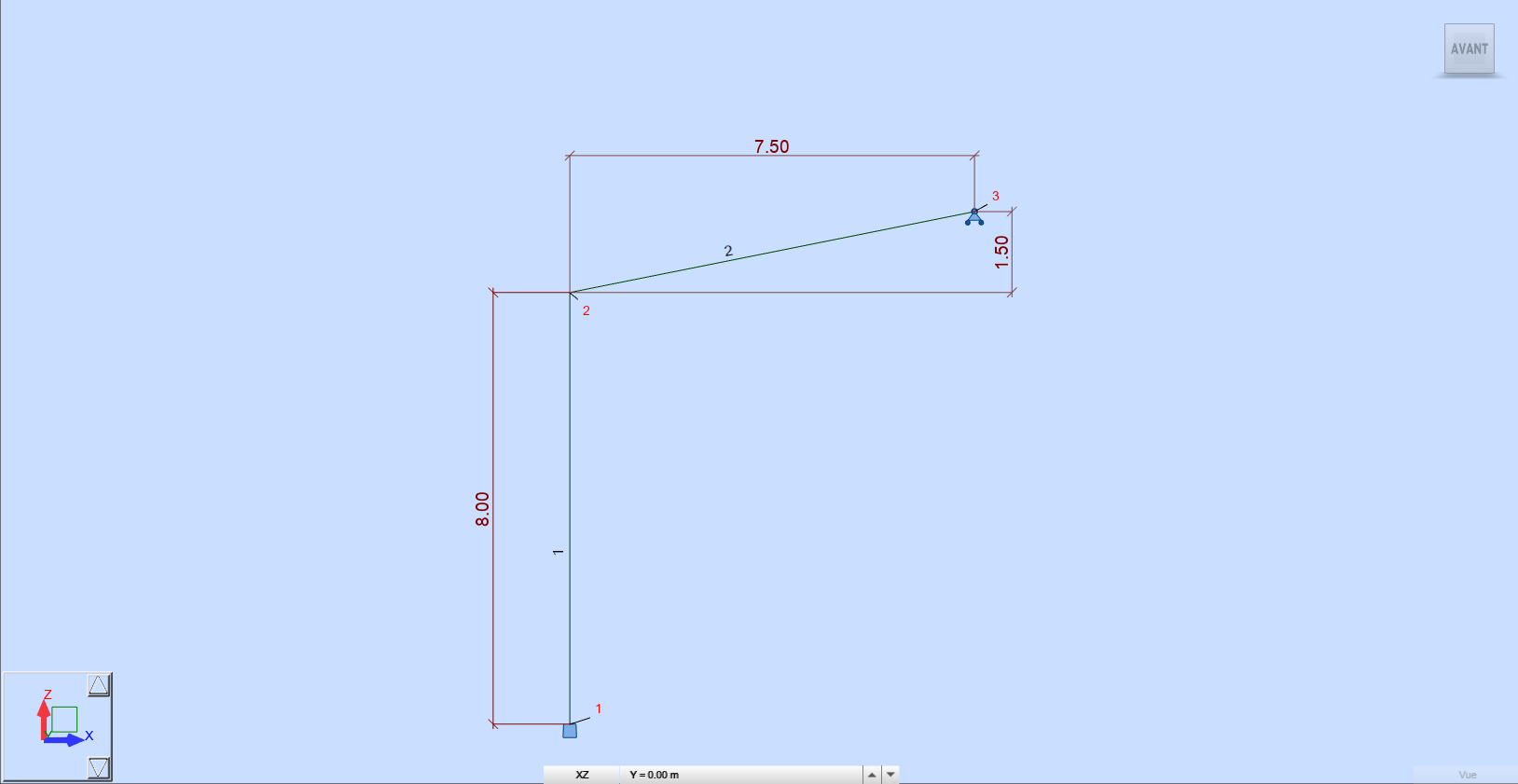
Figure 5 - Structure calculée
Cet exemple est traité à l’aide d’un tableur dont le fichier source est fourni dans la partie 3 du guide - il est téléchargeable en cliquant sur le lien ci-après. Fichier source au format Excel de l'exemple ci-dessous.
Ce tableur couvre deux exemples : l’exemple développé ci-après pour une structure à 2 barres (pour rester facilement lisible en format papier) et un second exemple avec 4 barres. Ces exemples permettent de visualiser et de comprendre l’enchaînement des tâches.
Les caractéristiques de barres nécessaires pour un problème plan sont : la section S, l’inertie I, le module d’Young E, la longueur L et l’orientation α, par exemple par rapport à l’horizontale.
| Barre | 1 | Barre | 2 |
| Section = | 1.000 m² | Section = | 1.500 m² |
| Inertie = | 0.083 m4 | Inertie = | 0.281 m4 |
| α = | 1.571 rad | α = | 0.197 rad |
| L = | 8.000 m | L = | 7.649 m |
E = 36 000 MPa pour toutes les barres.
On détermine aisément pour chaque barre les valeurs numériques de la matrice de raideur à partir des valeurs littérales de la figure 2.
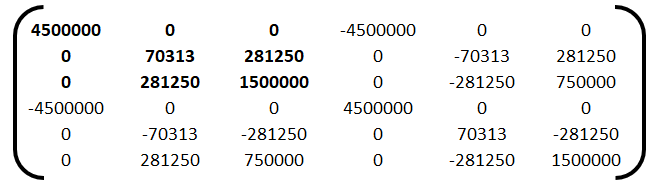
Barre 1 : matrice de raideur
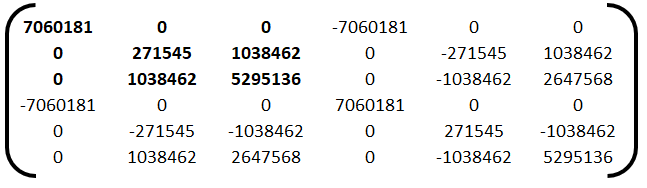
Barre 2 : matrice de raideur
On applique à ces deux matrices, la transformée permettant de les rendre compatibles avec le repère général.
Matrice de rotation pour α = 1.571 Rad :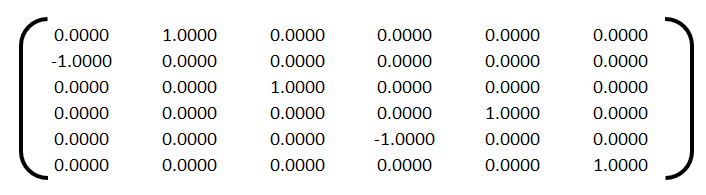
Et sa transposée :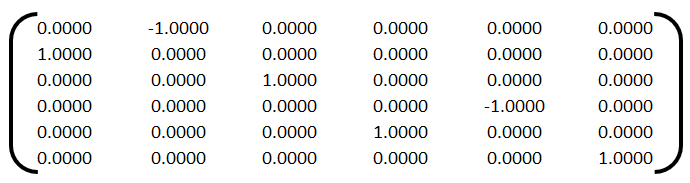
Matrice de rotation pour α = 0.197 Rad :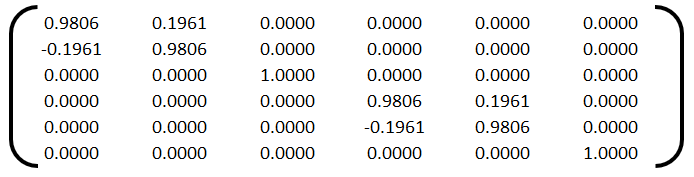
Et sa transposée :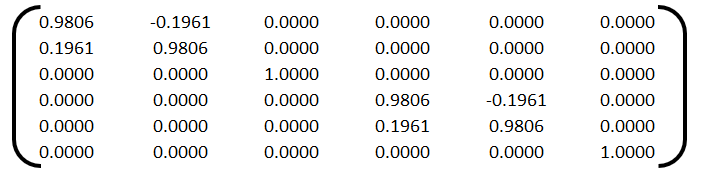
Barre 1 - Résultat de l’opération [K*]=[Λ]T[K][Λ] :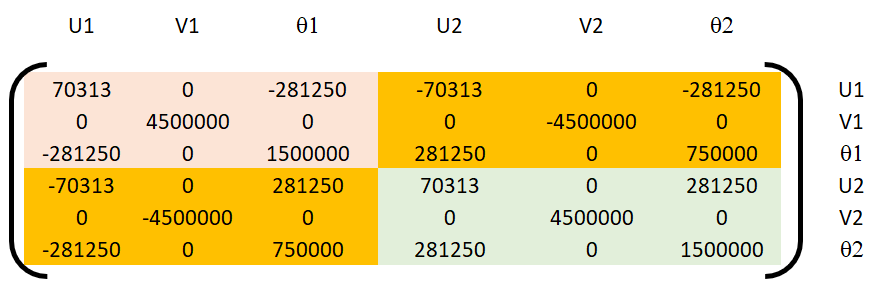 Barre 2 - Résultat de l’opération [K*]=[Λ]T[K][Λ] :
Barre 2 - Résultat de l’opération [K*]=[Λ]T[K][Λ] :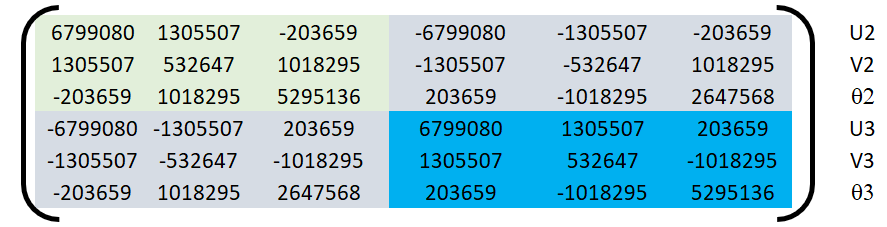
Toutes ces matrices unitaires sont ensuite assemblées, c’est-à-dire que l’ensemble des valeurs matricielles relatives à un même déplacement nodal sont cumulées.
Pour notre exemple, cela revient à sommer les valeurs des deux matrices correspondant aux nœuds communs (dans le cas général, les barres ne relient pas toujours deux nœuds dont la numération se suit comme ici) :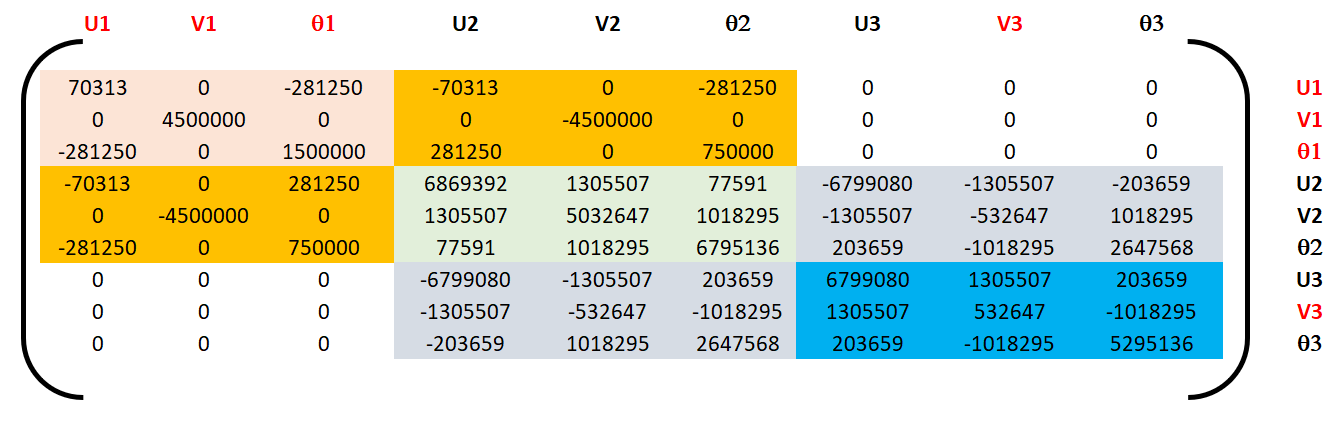
Les composantes des déplacements bloqués peuvent être supprimées de la matrice puisque nous connaissons déjà leur valeur, elle est nulle: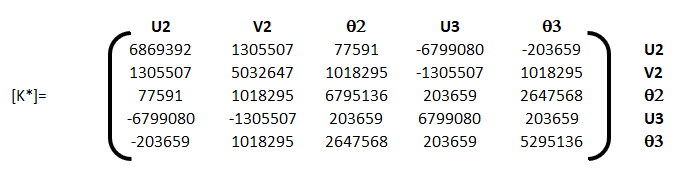
Cette matrice s’inverse facilement avec le tableur :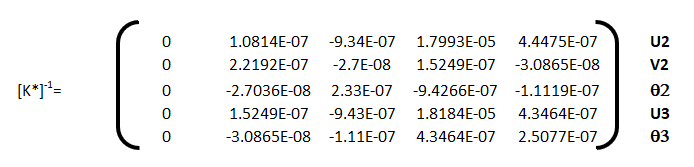
Chargement 1 : Forces extérieures appliquées sur un nœud
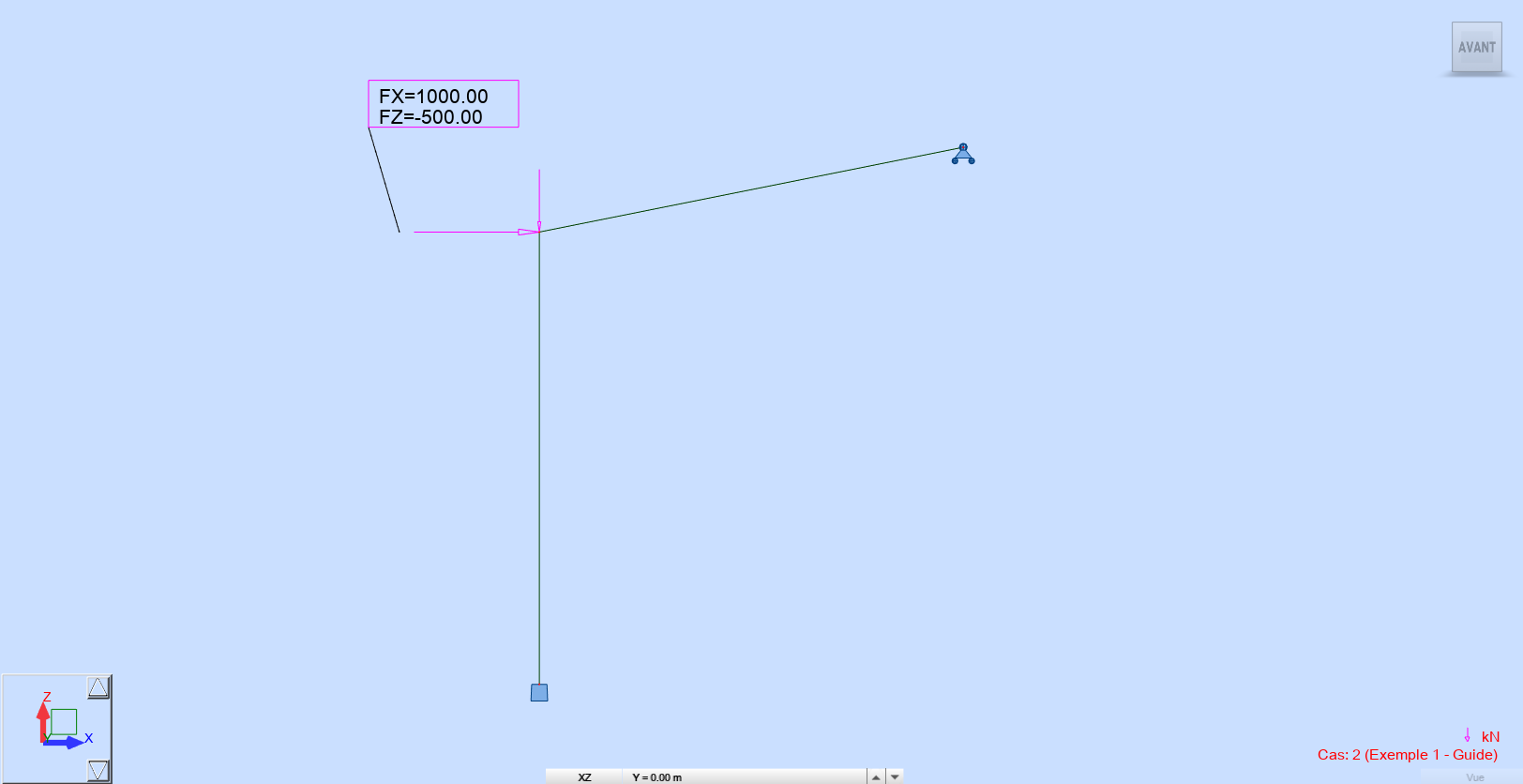
Figure 6 - Définition du chargement
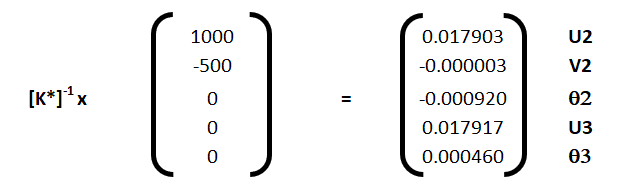
On calcule les déplacements des noeuds (dans le repère général):
On peut déterminer les efforts dans le poteau (barre 1) après transformation préalable des déplacements dans le repère local de la barre :
On a une compression de 12,68 kN, un tranchant de 1000 kN et un moment qui change de signe sur la barre (on vérifie bien que 1000 kN * 8 m - 3654,89 = 4345,11 kN.m en pied - ok).
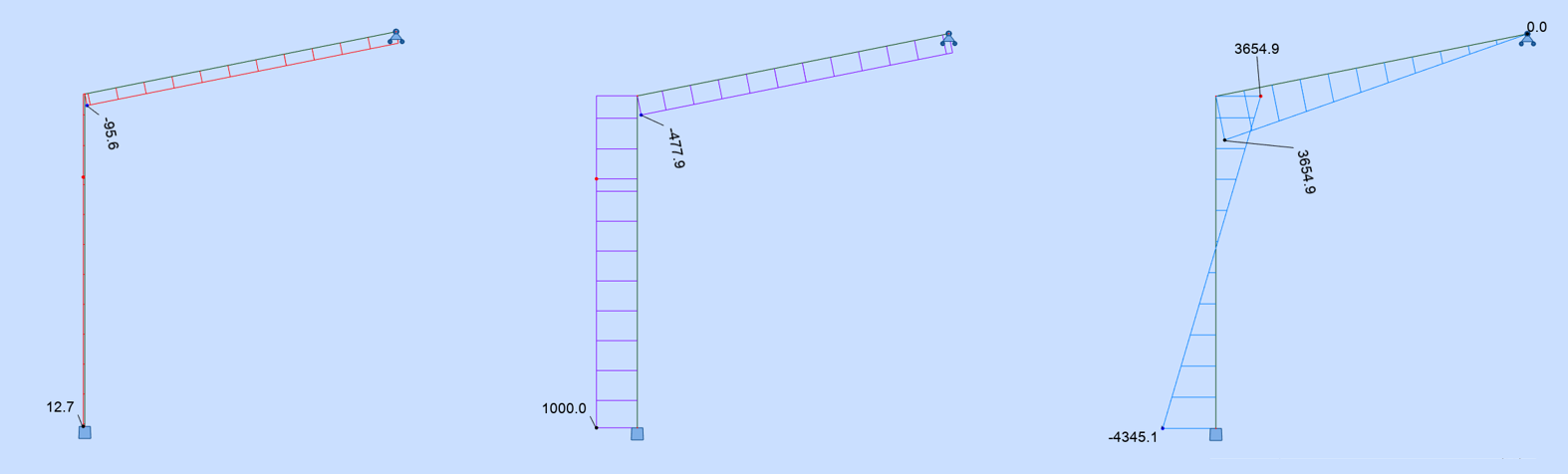
Figure 7 - Diagrammes N, V, M – exemple 1
Chargement 2 : Forces extérieures appliquées sur une barre (i.e. ailleurs qu’aux nœuds).
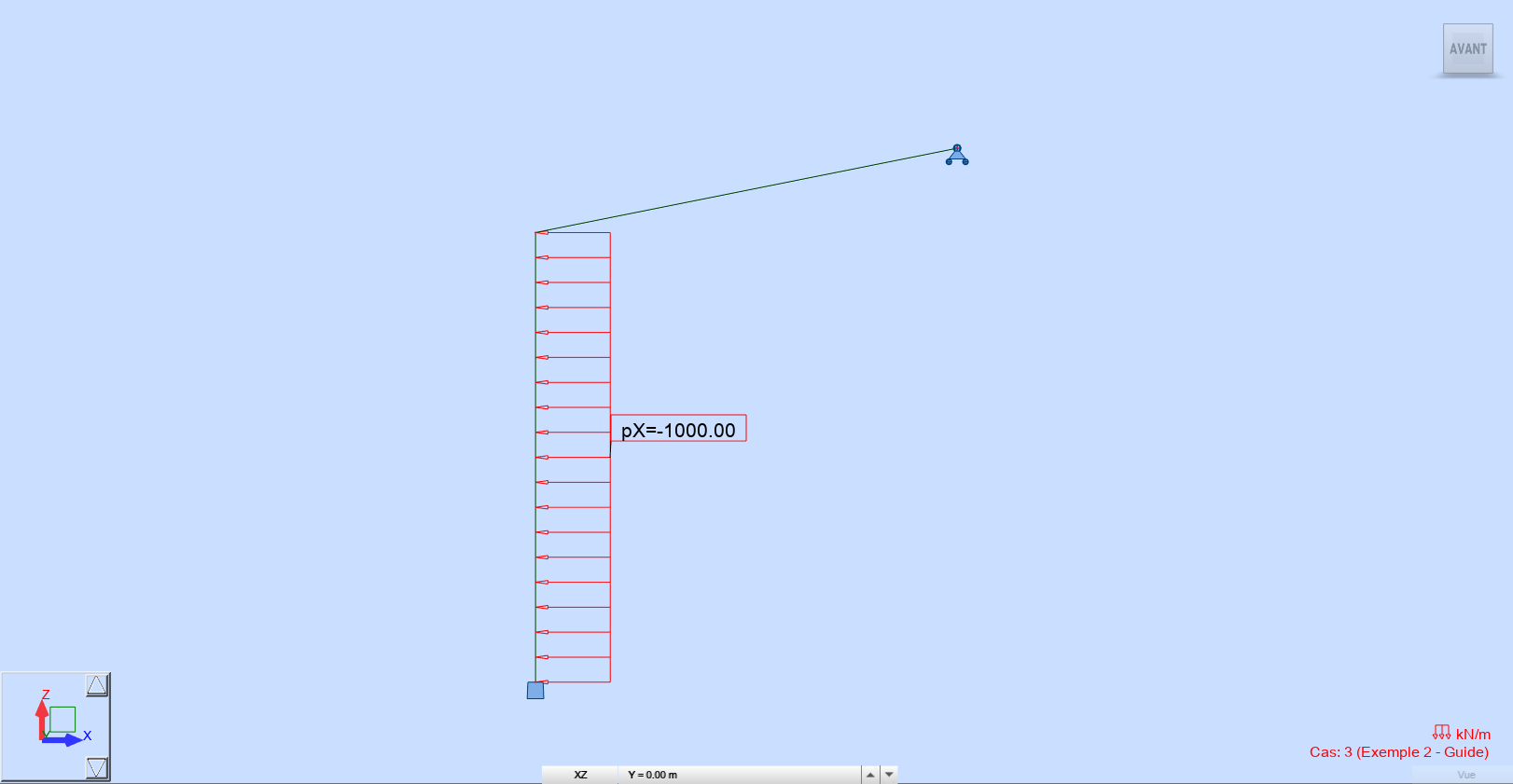
Figure 8 - Définition du chargement
Dans ce cas, il faut préalablement calculer les réactions d’appui de la barre bi-encastrée sous ces efforts, car ce sont elles qui doivent être injectées dans la matrice des charges extérieures (le logiciel ne connaît que les nœuds !). Un formulaire de poutre bi-encastrée suffit. Il faut veiller, bien entendu, au respect des conventions de signes.
Application à la charge répartie horizontale p=-1000 kN/m sur le poteau (figure 8). On sait dans ce cas que les moments d’encastrement valent -pL²/12 et les tranchants aux appuis +/-pL/2; donc, avec L=8 m et en tenant compte de la convention de signes:
En multipliant [K*]-1 par ces efforts, on obtient les valeurs des déplacements de tous les ddl. Il suffit ensuite de multiplier la matrice de raideur de la barre 1 par ces déplacements pour récupérer les efforts aux nœuds.
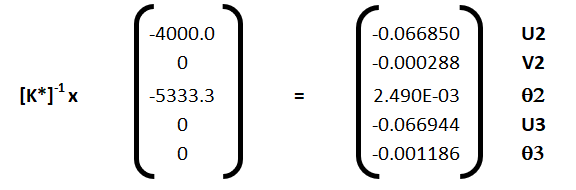
On peut calculer les efforts dans le poteau (barre 1) après conversion préalable des déplacements globaux dans le repère local de la barre…

… et les additionner avec les efforts d’encastrement parfait, avec la convention de signes adéquate: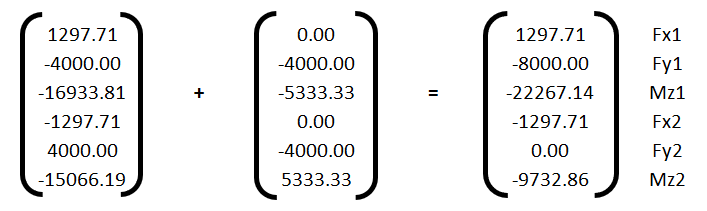
On a une de compression de 1298 kN , un tranchant qui passe de 0 à 8000 kN (pL=1000 kN/m * 8 m = 8000 kN) et un moment en pied très fortement majoré par rapport au moment d’encastrement parfait.
La même méthodologie s’applique à la barre 2 pour obtenir les efforts aux nœuds.
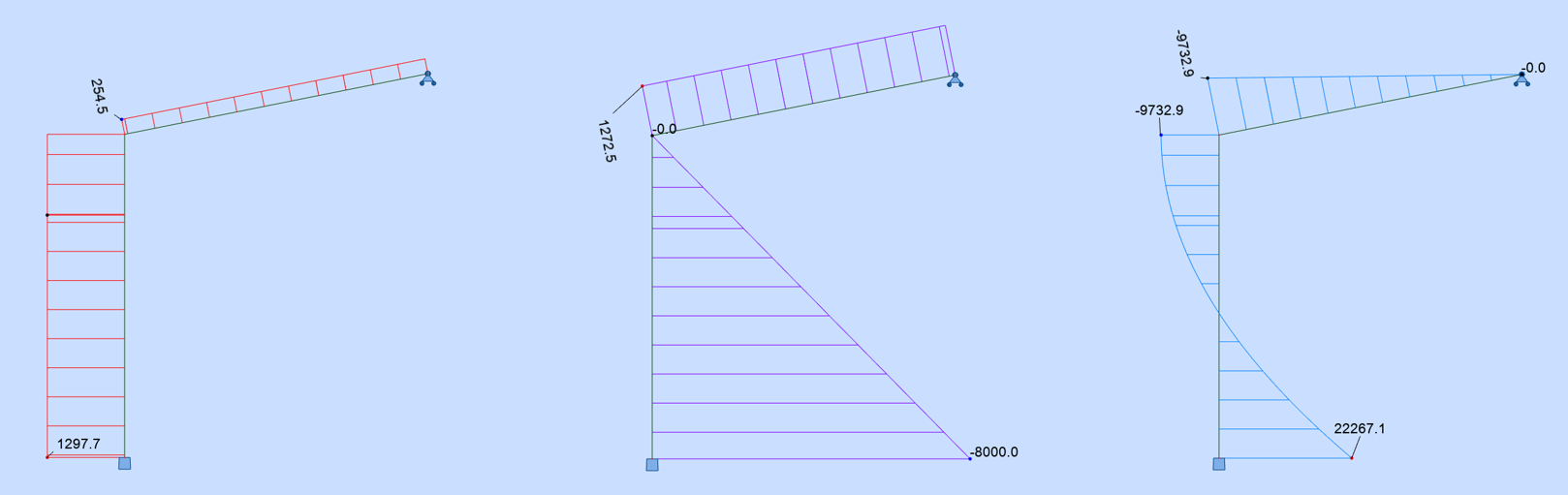
Figure 9 - Diagrammes N, V, M – exemple 2
Cas où les barres présentent des différences de raideur notable :
A titre d’exemple, on rigidifie très fortement la barre verticale. On décide, en gardant une longueur de 8 m, de passer sa section droite à 1 m * 1012 m (b*ht). On montre ci-après la matrice [K*] ; on ne peut que constater l’écart entre la valeur plus grande et la plus petite … ce qui peut aboutir dans certains cas à des instabilités numériques (la résolution conduit à diviser les termes de la matrice les uns par les autres).
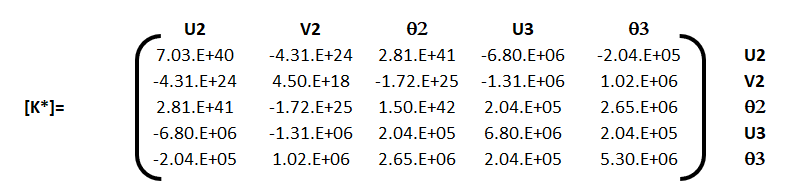
Figure 10 - Matrice avec valeurs disparates