PARTIE 2 - ÉLÉMENTS PRATIQUES
- Chapitre A. Comprendre les éléments finis
- A.1 Que fait le logiciel dans un calcul aux éléments finis? Exemple des structures à poutres.
- A.2 Qu’est-ce qu’un élément fini ?
- Chapitre B. Objectifs de calcul et caractéristiques nécessaires de l’outil
- B. Objectifs du calcul et caractéristiques nécessaires de l’outil
- B.7 Organisation du calcul
- Chapter C. Good practices to create a model
- C.1 Données d’entrée et unités
- C.2 Modélisation des éléments principaux
- C.3 EF et maillage
- C.4 Modélisation des éléments non structuraux ou des équipements
- C.5 Conditions aux limites
- C.6 Connexions – liaisons – assemblage
- C.7 Excentrements
- C.8 Sections composées (poutres/dalles)
- C.9 Matériaux
- C.10 Comportement spécifique au cisaillement et à la torsion
- C.11 Modélisation des charges
- C.12 Compléments liés aux éléments volumiques
- C.13 Compléments liés aux calculs non linéaires
- C.14 Compléments liés au béton précontraint
- C.15 Compléments liés au calcul phasé
- C.16 Compléments liés aux calculs dynamiques et sismiques
- Chapitre D. Analyse et exploitation des résultats
- D.1 Généralités sur les calculs numériques
- D.2 Combinaisons d’actions
- D.3 Exploitation des résultats
- D.4 Validations réglementaires : comportement en béton armé des éléments
- D.5 Comprendre et analyser les pics (cas du béton)
- D.6 Comprendre et analyser les pics (cas d’un assemblage métallique)
- D.7 Compléments spécifiques pour les calculs dynamiques
- Chapitre E. Comment assurer la qualité ?
- E.1 Prise en main d’un nouveau logiciel
- E.2 Validation d’un modèle par autocontrôle
- E.3 Traçabilité et travail à plusieurs
- Chapitre F. Comment bien présenter la note de calcul aux éléments finis ?
- F. Comment bien présenter la note de calcul aux éléments finis ?
Chapitre A. Comprendre les éléments finis
Chapitre A. Comprendre les éléments finis
A.1 Que fait le logiciel dans un calcul aux éléments finis ? Exemple des structures à poutres.
A.2 Concrètement qu'est-ce qu'un élément fini ?
Annexe 1 - Fichier de l'exemple de calcul matriciel
$translationBooksA.1 Que fait le logiciel dans un calcul aux éléments finis? Exemple des structures à poutres.
A.1 Que fait le logiciel dans un calcul aux éléments finis? Exemple des structures à poutres.
Cette introduction a pour finalité de montrer, sur un exemple simple, ce qui se cache derrière un calcul statique conduit avec un logiciel EF à barres.
Dans le wiki, par abus de langage, le terme “barre” est souvent employé pour désigner des éléments de type “poutre” et non pas exclusivement des éléments de type “barre” au sens strict (i.e. travaillant uniquement en effort normal).
Quelques rappels :
Le calcul informatique est basé sur une représentation de la structure par un ensemble de barres dont les intersections sont des nœuds. Son but est de déterminer les déplacements des nœuds de la structure, c’est-à-dire les déplacements des abouts des barres, sous les charges appliquées.
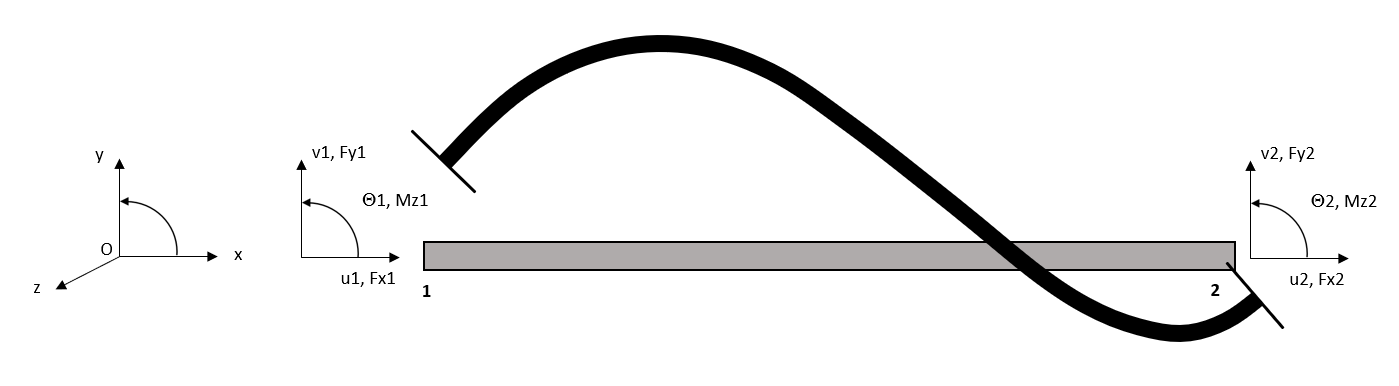 Figure 1 – Convention de signes – efforts et déplacements
Figure 1 – Convention de signes – efforts et déplacements
Les forces aux extrémités de la barre dépendent linéairement des déplacements en ces points. On montre qu’il existe une relation matricielle efforts-déplacements pour une barre reliant deux nœuds i et j, telle que, pour un repère donné, [Kij][qij]=[Fij] (figures 1 et 2), permettant d’exprimer les composantes des vecteurs [Fij] en fonction de celles des vecteurs [qij]. [Kij] est appelée la matrice de raideur de la barre, [Fij] le vecteur des efforts aux nœuds et [qij] le vecteur des déplacements des nœuds.
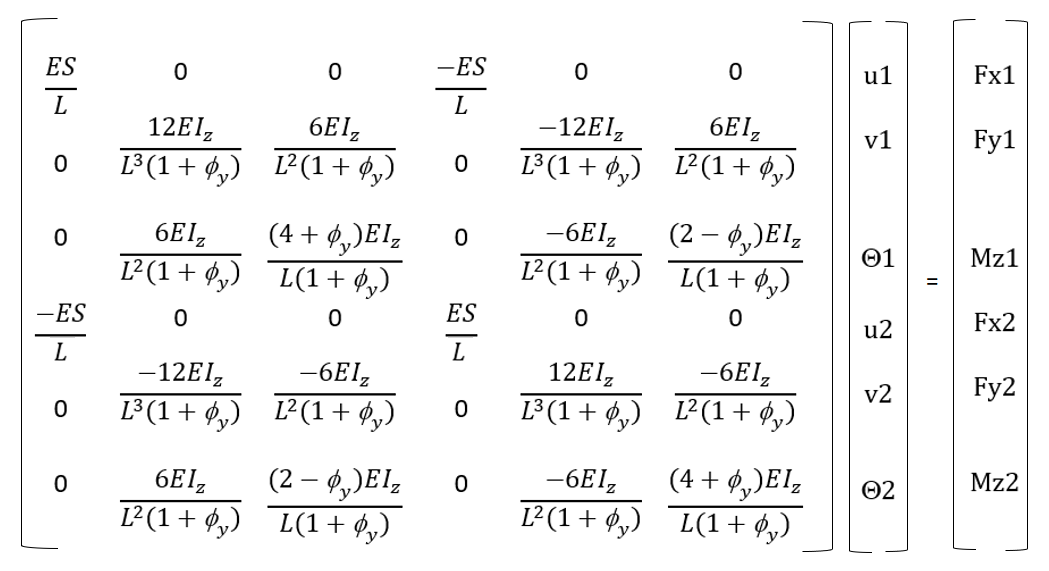 Figure 2 - Matrice de raideur d'une poutre bi-encastrée
Figure 2 - Matrice de raideur d'une poutre bi-encastrée
La matrice [Kij*], associée au repère général, se déduit de la matrice [Kij] exprimée dans le repère local de la barre en lui appliquant une transformée [Λ]T[Kij][Λ] (figure 3), permettant de rendre les déplacements compatibles avec ceux du repère général. [Kij*]=[Λ]T[Kij][Λ] est alors la matrice de raideur de la barre dans le repère général.
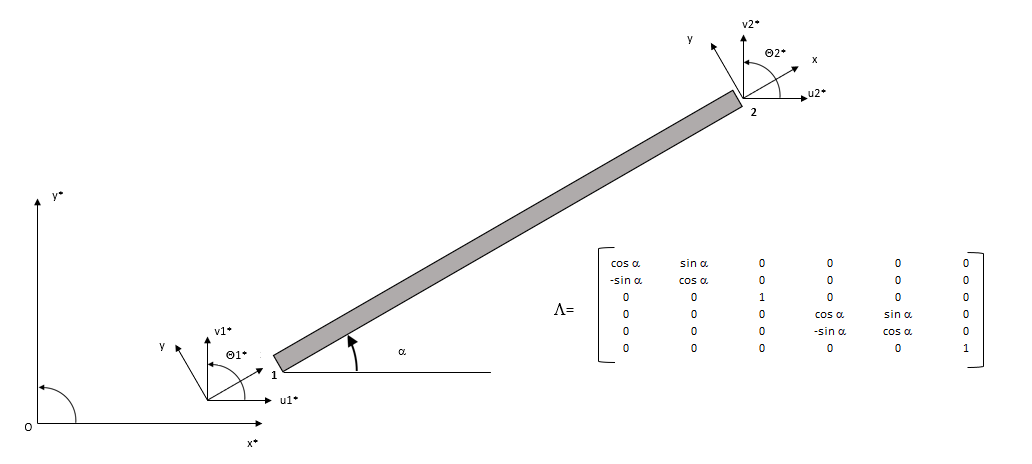 Figure 3 - Rotation des matrices
Figure 3 - Rotation des matrices
Pour calculer les déplacements de tous les nœuds, le logiciel :
-
« assemble » les matrices [Kij*] de chacune des barres pour former la matrice de raideur globale [K] de la structure (figure 4),
-
inverse [K] → [K]-1,
-
multiplie la matrice [K]-1 par celle [F] des efforts extérieurs, préalablement ramenés aux nœuds (s’ils sont appliqués sur une barre ailleurs qu’aux extrémités), dans le repère global, pour calculer le vecteur des déplacements [q].
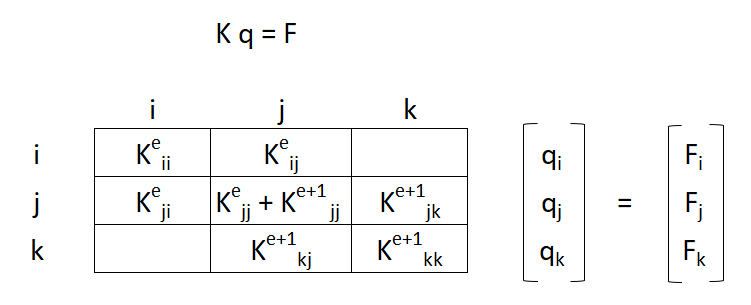 Figure 4 - Principe de l'assemblage
Figure 4 - Principe de l'assemblage
Enfin, pour calculer les efforts internes de la structure, le logiciel multiplie la matrice de raideur [Kij] de chaque barre par le vecteur des déplacements [qij], dans le repère local, aux nœuds i et j. Il obtient ainsi les efforts aux nœuds et les additionne, le cas échéant, aux réactions de la barre bi-encastrée (i.e. les efforts introduits dans le modèle global, mais ici projetés dans le repère local de la barre) - voir le second exemple ci-dessous. Les efforts et déplacements le long des barres se déduisent aisément de ceux des nœuds à l'aide des formules de la RDM.
Application à un exemple simple :
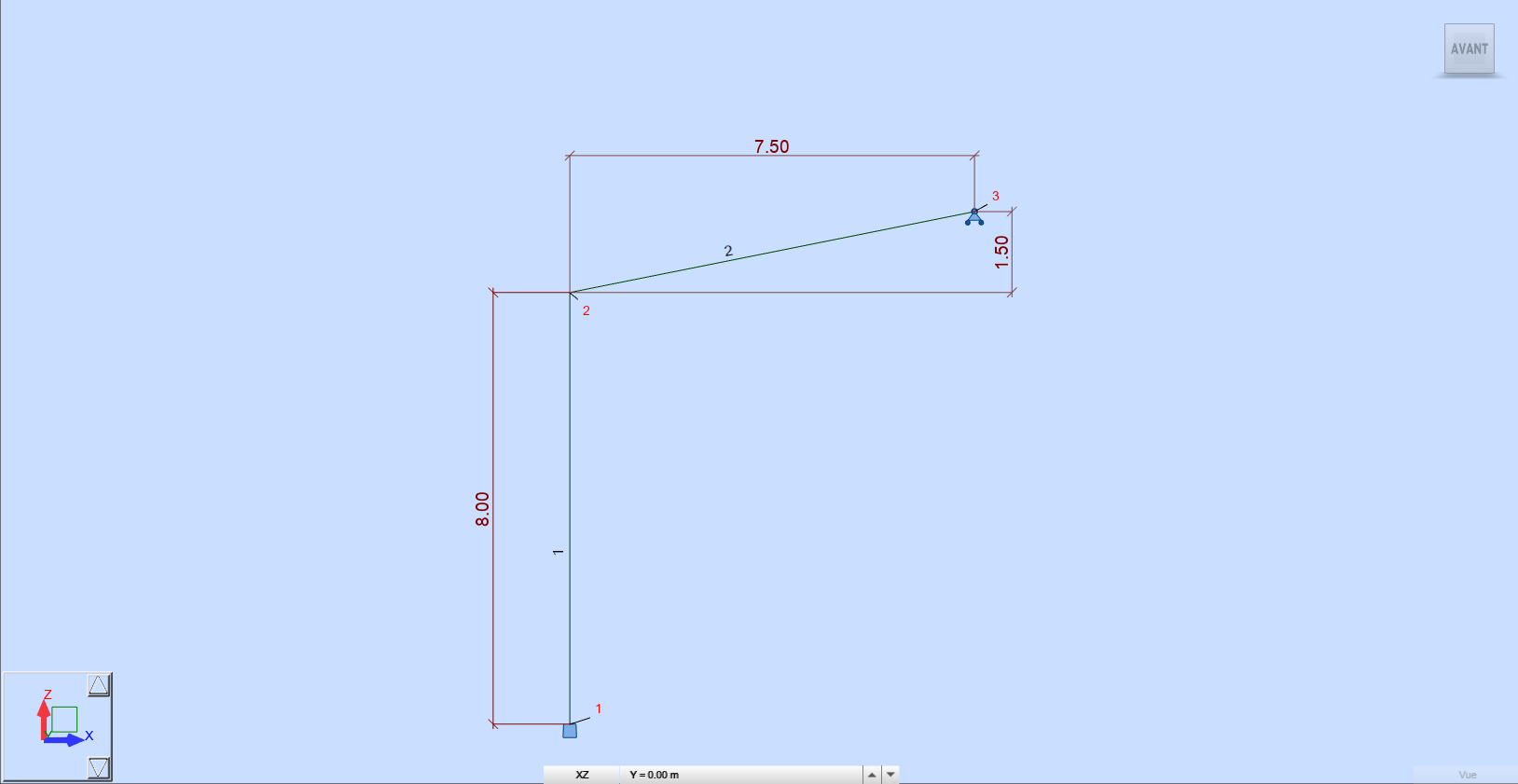
Figure 5 - Structure calculée
Cet exemple est traité à l’aide d’un tableur dont le fichier source est fourni dans la partie 3 du guide - il est téléchargeable en cliquant sur le lien ci-après. Fichier source au format Excel de l'exemple ci-dessous.
Ce tableur couvre deux exemples : l’exemple développé ci-après pour une structure à 2 barres (pour rester facilement lisible en format papier) et un second exemple avec 4 barres. Ces exemples permettent de visualiser et de comprendre l’enchaînement des tâches.
Les caractéristiques de barres nécessaires pour un problème plan sont : la section S, l’inertie I, le module d’Young E, la longueur L et l’orientation α, par exemple par rapport à l’horizontale.
| Barre | 1 | Barre | 2 |
| Section = | 1.000 m² | Section = | 1.500 m² |
| Inertie = | 0.083 m4 | Inertie = | 0.281 m4 |
| α = | 1.571 rad | α = | 0.197 rad |
| L = | 8.000 m | L = | 7.649 m |
E = 36 000 MPa pour toutes les barres.
On détermine aisément pour chaque barre les valeurs numériques de la matrice de raideur à partir des valeurs littérales de la figure 2.
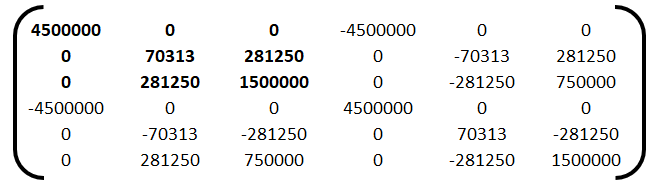
Barre 1 : matrice de raideur
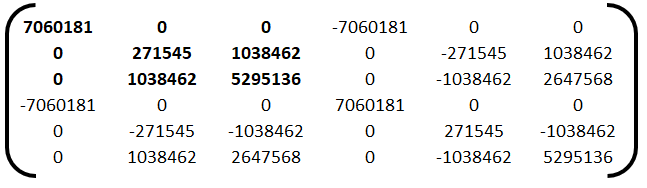
Barre 2 : matrice de raideur
On applique à ces deux matrices, la transformée permettant de les rendre compatibles avec le repère général.
Matrice de rotation pour α = 1.571 Rad :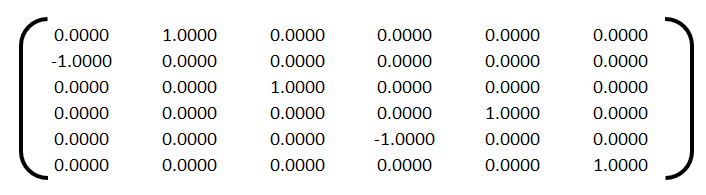
Et sa transposée :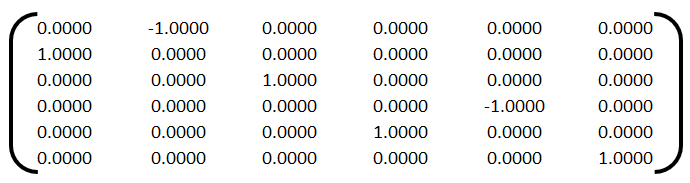
Matrice de rotation pour α = 0.197 Rad :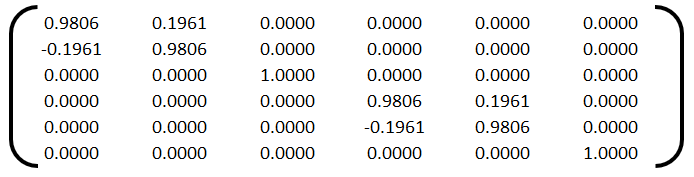
Et sa transposée :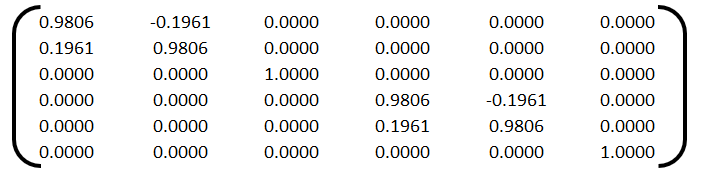
Barre 1 - Résultat de l’opération [K*]=[Λ]T[K][Λ] :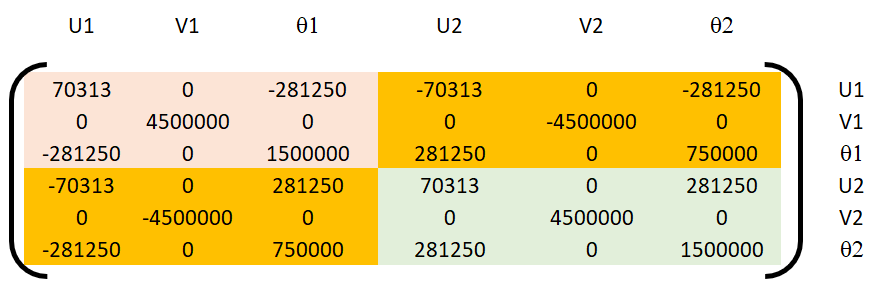 Barre 2 - Résultat de l’opération [K*]=[Λ]T[K][Λ] :
Barre 2 - Résultat de l’opération [K*]=[Λ]T[K][Λ] :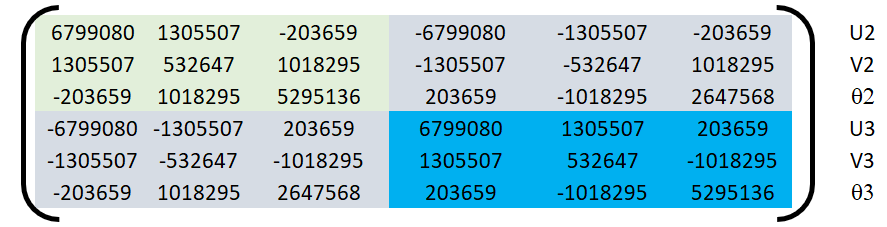
Toutes ces matrices unitaires sont ensuite assemblées, c’est-à-dire que l’ensemble des valeurs matricielles relatives à un même déplacement nodal sont cumulées.
Pour notre exemple, cela revient à sommer les valeurs des deux matrices correspondant aux nœuds communs (dans le cas général, les barres ne relient pas toujours deux nœuds dont la numération se suit comme ici) :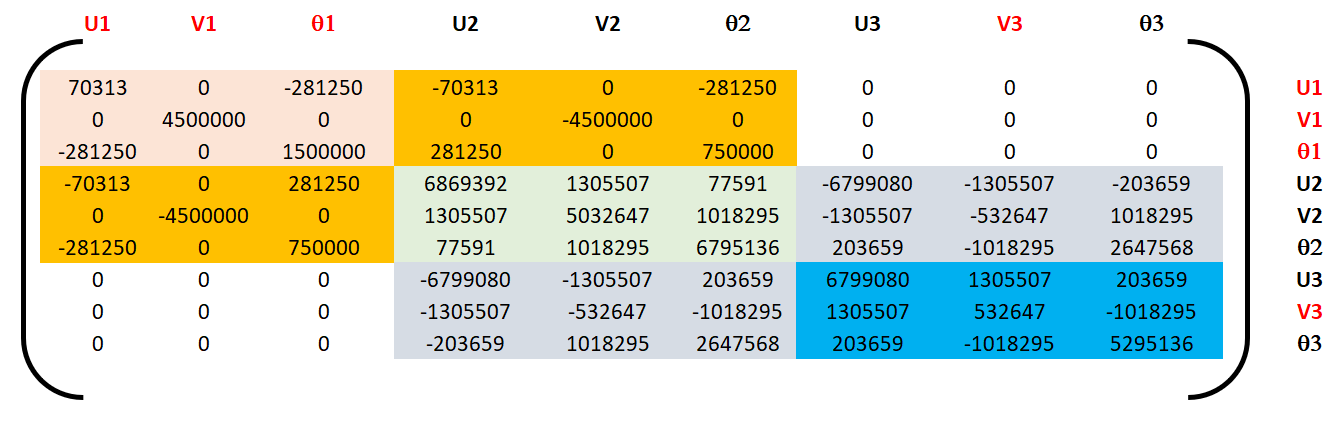
Les composantes des déplacements bloqués peuvent être supprimées de la matrice puisque nous connaissons déjà leur valeur, elle est nulle: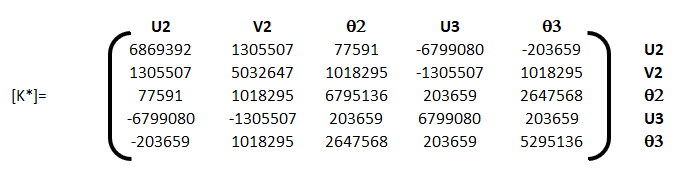
Cette matrice s’inverse facilement avec le tableur :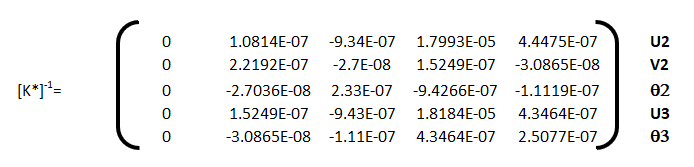
Chargement 1 : Forces extérieures appliquées sur un nœud
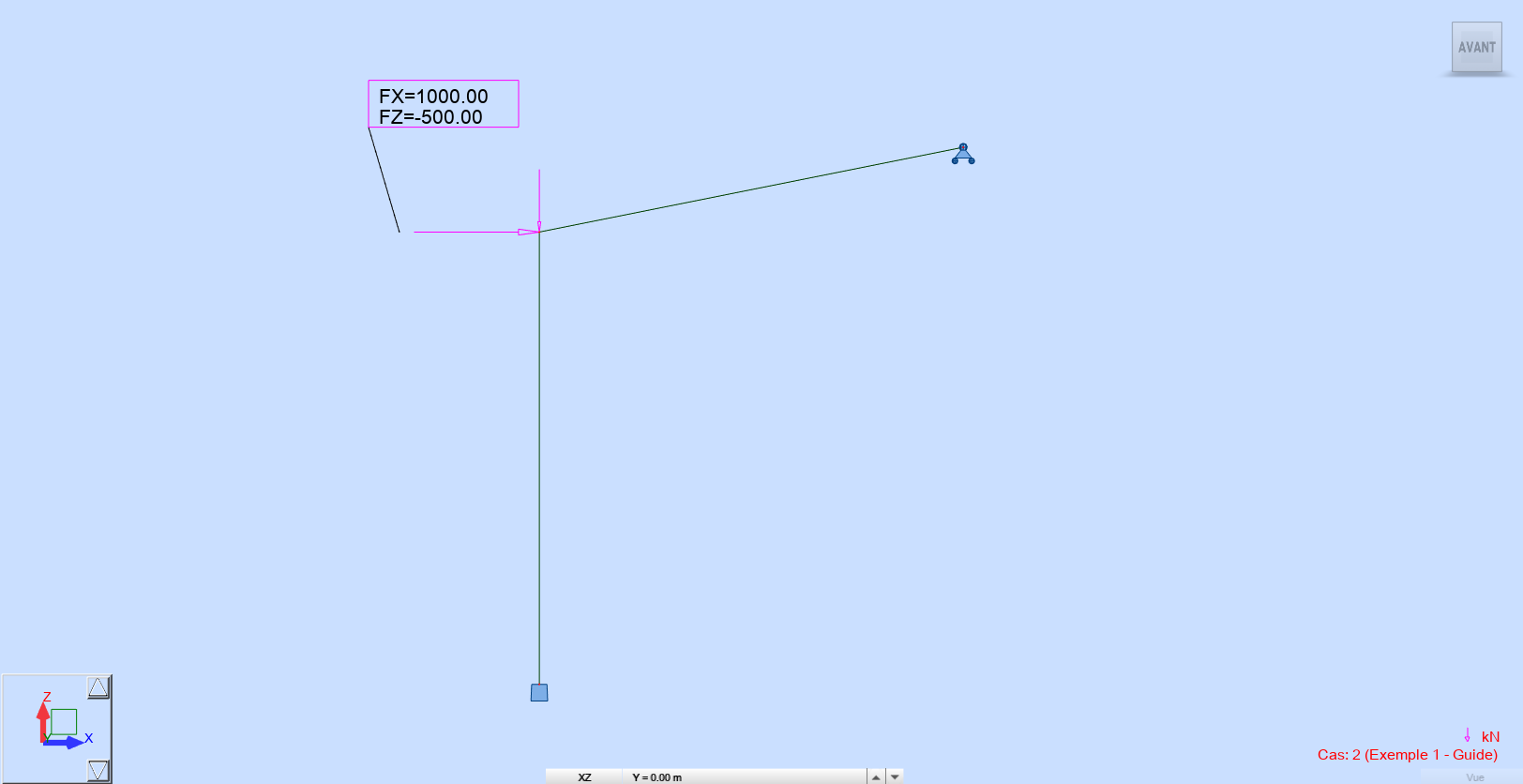
Figure 6 - Définition du chargement
On calcule les déplacements des noeuds (dans le repère général):
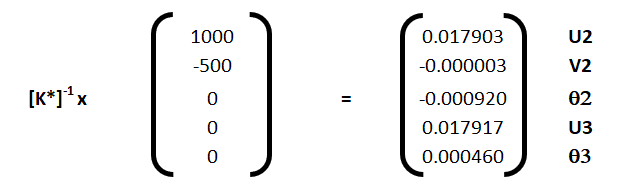
On peut déterminer les efforts dans le poteau (barre 1) après transformation préalable des déplacements dans le repère local de la barre :
On a une compression de 12,68 kN, un tranchant de 1000 kN et un moment qui change de signe sur la barre (on vérifie bien que 1000 kN * 8 m - 3654,89 = 4345,11 kN.m en pied - ok).
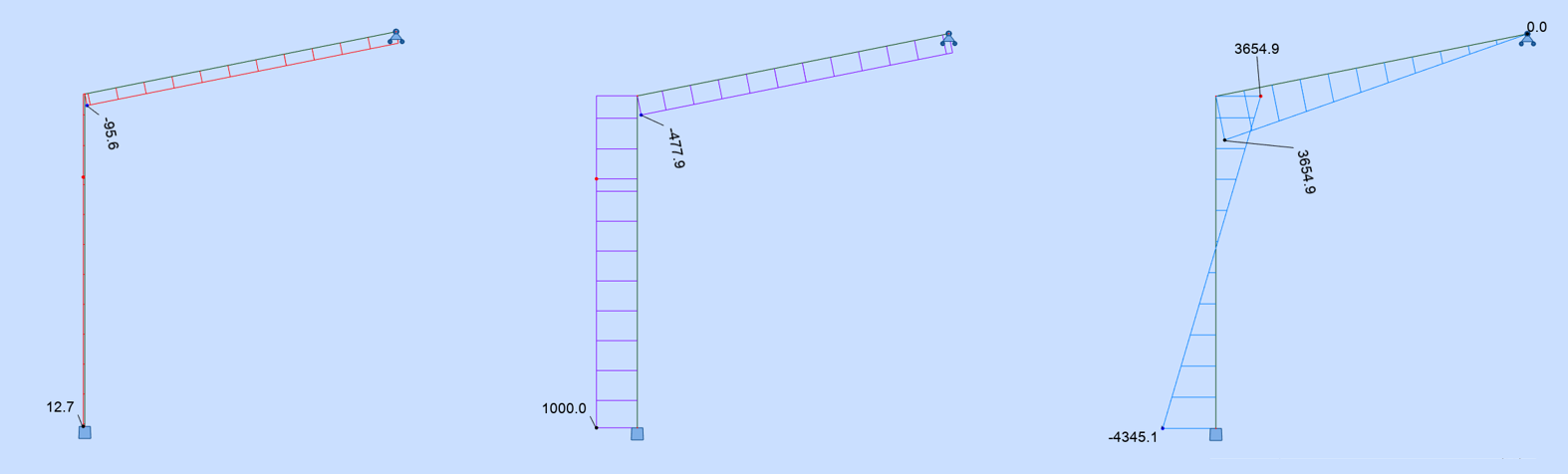
Figure 7 - Diagrammes N, V, M – exemple 1
Chargement 2 : Forces extérieures appliquées sur une barre (i.e. ailleurs qu’aux nœuds).
Figure 8 - Définition du chargement
Dans ce cas, il faut préalablement calculer les réactions d’appui de la barre bi-encastrée sous ces efforts, car ce sont elles qui doivent être injectées dans la matrice des charges extérieures (le logiciel ne connaît que les nœuds !). Un formulaire de poutre bi-encastrée suffit. Il faut veiller, bien entendu, au respect des conventions de signes.
Application à la charge répartie horizontale p=-1000 kN/m sur le poteau (figure 8). On sait dans ce cas que les moments d’encastrement valent -pL²/12 et les tranchants aux appuis +/-pL/2; donc, avec L=8 m et en tenant compte de la convention de signes:
En multipliant [K*]-1 par ces efforts, on obtient les valeurs des déplacements de tous les ddl. Il suffit ensuite de multiplier la matrice de raideur de la barre 1 par ces déplacements pour récupérer les efforts aux nœuds.
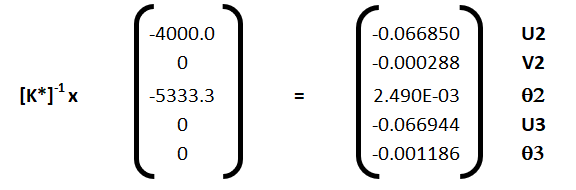
On peut calculer les efforts dans le poteau (barre 1) après conversion préalable des déplacements globaux dans le repère local de la barre…

… et les additionner avec les efforts d’encastrement parfait, avec la convention de signes adéquate: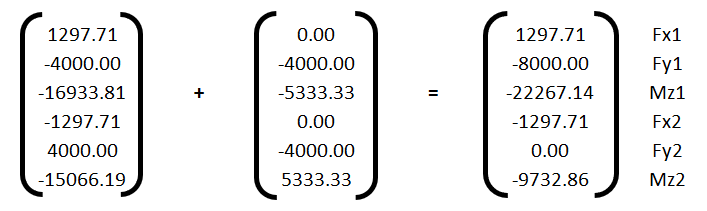
On a une de compression de 1298 kN , un tranchant qui passe de 0 à 8000 kN (pL=1000 kN/m * 8 m = 8000 kN) et un moment en pied très fortement majoré par rapport au moment d’encastrement parfait.
La même méthodologie s’applique à la barre 2 pour obtenir les efforts aux nœuds.
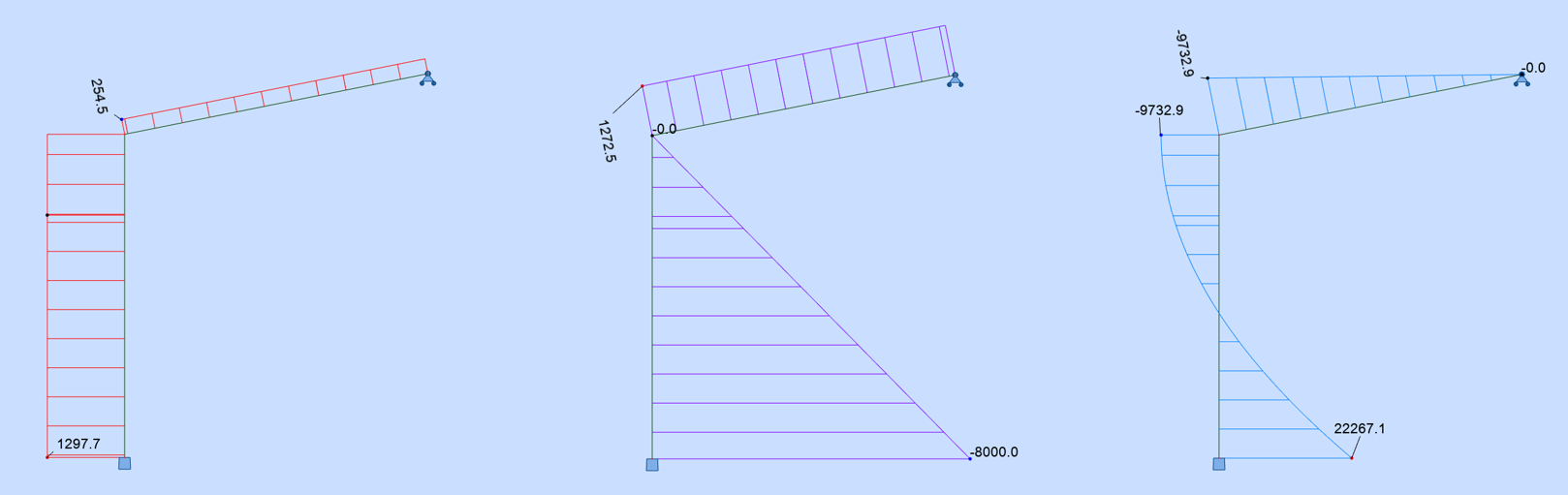
Figure 9 - Diagrammes N, V, M – exemple 2
Cas où les barres présentent des différences de raideur notable :
A titre d’exemple, on rigidifie très fortement la barre verticale. On décide, en gardant une longueur de 8 m, de passer sa section droite à 1 m * 1012 m (b*ht). On montre ci-après la matrice [K*] ; on ne peut que constater l’écart entre la valeur plus grande et la plus petite … ce qui peut aboutir dans certains cas à des instabilités numériques (la résolution conduit à diviser les termes de la matrice les uns par les autres).
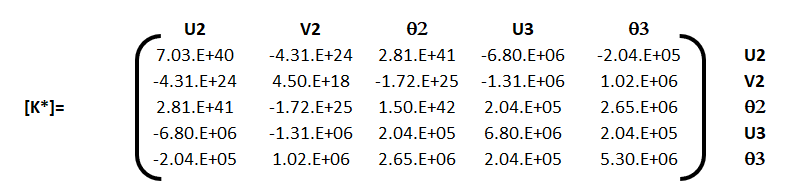
Figure 10 - Matrice avec valeurs disparates
$translationBooksA.2 Qu’est-ce qu’un élément fini ?
A.2 Qu’est-ce qu’un élément fini ?
La détermination des efforts dans les éléments est réalisée à la suite du calcul des déplacements des nœuds. La méthode est spécifique pour chaque type d’éléments et dépend du logiciel utilisé.
Le principe est néanmoins commun à tous les logiciels, il consiste à « isoler » un élément pour calculer les efforts aux points de Gauss à partir des déplacements des nœuds.
La position des points de Gauss est normalement précisée dans la documentation du logiciel; dans le cas d’un élément de coque à 4 nœuds comme ci-dessous, ils pourraient être situés à une distance du bord de l’élément égale à 1/5 de sa largeur environ.

Exemple d’un élément à 4 nœuds
Les efforts au centre de l’élément sont calculés comme la moyenne des efforts aux points de Gauss, les efforts aux nœuds sont extrapolés à partir des points de Gauss.

Pour résumer, le logiciel calcule :
-
les efforts aux points de Gauss G1 à G4 à partir des déplacements des nœuds n1 à n4 ;
-
les efforts au centre C qui sont la moyenne des efforts aux points de Gauss G1 à G4 ;
-
les efforts aux nœuds n1 à n4 qui sont extrapolés à partir des efforts en G1 à G4.

Ces calculs étant réalisés pour tous les éléments, au final il y a autant d’efforts aux nœuds qu’il y a d’éléments connectés sur ce nœud (ici 4 éléments E1 à E4 pour le nœud n1).
Il peut alors en déduire :
-
soit l’effort maximal sur le nœud (maximum des efforts calculés à partir des éléments E1 à E4) ;
-
soit l’effort moyen (moyenne des efforts calculés à partir de E1 à E4).
Principales remarques dans les utilisations courantes.
-
En règle générale, les éléments quadrangulaires conduiront à une meilleure précision des résultats que des éléments triangulaires.
-
Ce sont les résultats aux points de Gauss qui sont le plus précis, mais ils ne sont généralement pas accessibles aux utilisateurs.
-
Les résultats aux centres des éléments sont plus fiables que les efforts aux nœuds, car ils ne sont pas extrapolés.
-
C’est à l’ingénieur de choisir en fonction du comportement de la structure le type de résultat (maximal, moyen, lissé, etc..) ; il n’y a pas de règle prédéfinie.
Exemple d'une charge sur une dalle de pont illustrant les écarts de résultats lors d'un calcul EF.
$translationBooksChapitre B. Objectifs de calcul et caractéristiques nécessaires de l’outil
Chapitre B. Objectifs de calcul et caractéristiques nécessaires de l’outil
La réalisation d’un modèle de calcul par éléments finis comprend plusieurs étapes. Le choix de l’outil est prépondérant et dépend de plusieurs critères. Une modélisation réussie demande une bonne organisation initiale.
B.1 à B.6 Critères à prendre en compte
$translationBooksB. Objectifs du calcul et caractéristiques nécessaires de l’outil
B. Objectifs du calcul et caractéristiques nécessaires de l’outil
La réalisation d’un modèle de calcul par éléments finis comprend plusieurs étapes. Le choix de l’outil est primordial et dépend de plusieurs critères.
B.1 En fonction de l’objet à modéliser
Tout d’abord, le logiciel de calcul doit être adapté à l’objet à modéliser.
a) Entre un pont (ouvrage courant à faible portée ou ouvrage complexe à plusieurs travées), un bâtiment ou un ouvrage géotechnique (soutènement, tunnel, barrages…), les problématiques sont différentes.
En fonction de la taille de l’objet, on peut définir une ou plusieurs échelles de modélisation, notamment:
-
une échelle géologique (qui vise à traiter une structure dans son environnement en fonction des données géologiques) ;
-
une échelle globale qui vise à traiter une structure dans son ensemble (calculs longitudinaux de flexion générale pour les ponts par exemple) ;
-
une échelle semi-locale avec un maillage plus serré pour certains éléments de la structure (calculs transversaux sous les actions des essieux pour les ponts, par exemple) ;
-
une échelle locale, avec une modélisation très raffinée et un post traitement des résultats (calculs de béton armé pour le poinçonnement ou des aciers de diffusion ou de frettage…).
b) Un objet peut donner lieu à plusieurs modélisations qui se complètent entre elles.
| Echelle | GLOBALE | SEMI-LOCALE | LOCALE |
| Ouvrage d’Art | Flexion longitudinale | Flexion transversale | Concentrations de contraintes (zone d’ancrage ou de déviations des câbles, appui concentré) |
| Bâtiment | Descente de charge / Contreventement (vent, séisme) / Calcul dynamique | Flexion locale des éléments horizontaux (planchers, radiers) | Charges concentrées, accidentelles (zone d’ancrage, supports de machines) |
| Géotechnique | Remblais, soutènement | Arrachement tirant dans massif de sol, écoulement,… |
c) Dans le cas d’une structure dont la cinématique de construction a un impact sur l’état final, le logiciel doit pouvoir autoriser la simulation complète du phasage, en permettant entre autres une activation sélective des éléments (comme la mise en tension des câbles de précontrainte et des haubans par exemple), ce qui permet de travailler sur la partie de structure en cours de construction.
d) Si un calcul dynamique est nécessaire (par exemple un calcul sismique avec prise en compte des effets du sol ou un calcul vibratoire ou encore un problème de dynamique rapide comme une explosion), il ne peut pas être traité avec tous les logiciels.
e) Les calculs non-linéaires ne sont pas systématiquement possibles (calcul avec non-linéarités matérielles, appuis élasto-plastiques, calcul des grands déplacements au second ordre pour la vérification au flambement, etc.)
f) Les modélisations de structure à câbles (dont la rigidité transversale à la flexion et à la torsion est peu importante par rapport à la rigidité longitudinale ) sont aussi particulières et assurées seulement par certains logiciels.
g) La détermination d’un champ thermique (chargement volumique déterminé à partir d’une variation de la température et du coefficient de dilatation thermique du matériau) peut nécessiter l’utilisation d’un module complémentaire au logiciel.
h) La modélisation des fondations, comme le cas d’un radier présentant un soulèvement, est généralement liée à des calculs non-linéaires et rejoint donc le point d).
B.2 En fonction de la phase d’étude
La phase d’étude d’un ouvrage a un impact sur le niveau de précision attendu des calculs.
-
En phase d’Etudes Préliminaires, la modélisation doit rester pragmatique, ne jamais être complexe et donner des résultats majorés.
-
En phase d’Avant-projet ou de Projet, il s’agit d’établir un prédimensionnement de l’ouvrage qui sert de base à la préparation d’un appel d’offres. Les calculs sont plus accomplis, voire complexes, mais rarement exhaustifs. Les modèles doivent être rapides, conserver une certaine souplesse et faciles à corriger, de telle sorte qu’ils ne brident pas le projet et permette de facilement tester des variantes.
-
En phase d'Exécution, le projet étant arrêté, les calculs doivent être complets, peuvent être complexes, doivent donner des résultats concrètement exploitables et doivent garantir un dimensionnement à la fois sûr et optimisé.
A titre indicatif, le tableau ci-dessous présente le niveau de détail généralement attendu par phase. Selon les spécificités du projet et les souhaits du client, le contenu des phases peut néanmoins être amené à varier :
| Objet \ Avancement | Etude préliminaire | AVP | PRO | EXE |
| Ouvrage d’Art, Bâtiment industriel, Ouvrage de GC | Ratios, Retour d'expérience, Modèle global simplifié (modèle 2D de préférence) | Modèle global | Modèle global + vérifications semi-locales, voire locales pour points critiques | Modèle global + semi-local + local généralisé |
B.3 En fonction des objectifs de vérification
Pour un même objet et une même phase d’étude, on peut être amené à monter plusieurs modèles qui traiteront chacun de vérifications différentes.
Dans la mesure du possible, on cherche à ce qu’un même modèle réponde à un maximum de vérifications mais on doit souvent découpler les problématiques.
B.4 En fonction des résultats attendus
Les résultats exploitables par les différents logiciels peuvent influencer les choix.
a) Des modules intégrés de post-traitement rendent certains logiciels intéressants, notamment ceux qui permettent d’obtenir un ferraillage des sections de béton armé à partir des sollicitations, ou ceux qui incorporent la vérification de profilés métalliques au flambement/déversement ou la vérification d’assemblages classiques. Il est indispensable au préalable de vérifier la conformité du post-traitement avec les règlements de référence du projet.
b) Les types de résultats en sortie peuvent aussi être variés et plus ou moins adaptés (listings, diagrammes des efforts, cartographies, enveloppes des combinaisons avec ou sans conservation des concomitances).
B.5 En fonction des délais et des ressources
En termes de délais, et donc de budget, il faut bien distinguer le temps de modélisation (géométrie, chargements, combinaisons, …), le temps de calcul, le temps de mise au point/réglage (débogage des erreurs, vérifications des conditions aux appuis, …) et enfin le temps d’analyse. Ces durées peuvent varier de manière significative suivant les logiciels, car leur interface utilisateur est plus moins intuitive (interface de conception qui peut être soit graphique, soit programmable dans une fenêtre de commande ou par l’intermédiaire de tableurs). L’extraction des résultats n’est pas nécessairement immédiate, il peut être utile de repérer les points critiques.
Les ressources disponibles au sein du bureau d’études guident également le choix du type de calcul : le matériel informatique, sur lequel le logiciel est installé, doit être libre, tout comme la licence d’utilisation qui peut être accaparée par un autre utilisateur. Le planning de disponibilité des outils peut jouer sur les délais et, éventuellement, conduire à changer de logiciel.
Si le bureau d’étude possède un type de matériel à capacité réduite, le degré de complexité des calculs est diminuée d’autant. Et si le modèle de calcul compliqué est maintenu, le bureau d’étude ne doit pas « bricoler » un modèle adapté à la capacité de ses matériels, car les simplifications adoptées peuvent alors entraîner des problèmes de justesse des résultats. Le bureau d’étude a alors tout intérêt à sous-traiter le calcul.
Pour des ouvrages importants, il peut être préférable de mettre en œuvre deux niveaux de modélisation, en utilisant des sous-modèles, car un modèle unique peut vite devenir démesuré en taille, et être, de ce fait, difficile à structurer et à manipuler. Il faut cependant être capable de relier les modèles entre eux. Par ailleurs, le besoin de capacités de calcul spécifiques peut également conduire à la scission de modèles et à l'emploi de logiciels différents.
Une autre raison de scinder les modèles comme décrit ci-avant, peut être liée au calendrier des études (conséquence de l’organisation des projets) : le calcul de la totalité de l’ouvrage précède parfois de plusieurs mois, pour les projets importants, le calcul de certaines parties de l’ouvrage. Rien n’empêche, par post traitement, de pallier certaines lacunes du logiciel, en extrayant les résultats d’un sous-modèle et de les traiter manuellement ou par l’intermédiaire d’un autre logiciel.
Une ressource également importante est le personnel, c’est-à-dire l’ingénieur chargé de la modélisation. Celui-ci doit être formé à l’utilisation du logiciel. Dans le cas où ce dernier est novice en la matière, le temps d’apprentissage ne doit pas être sous-estimé, la durée de conception et de mise au point du modèle pouvant être amplifiée grandement. La mise en place d’un tutorat avec un ingénieur senior est fortement recommandée, malgré l'investissement en temps que cela représente.
B.6 En fonction du confort d’utilisation
Enfin, le confort dans l’utilisation du logiciel est primordial.
a) Un logiciel avec une notice complète (d’installation, de prise en main et d’exploitation) est toujours plus appréciable. La présence d’un catalogue d’exemples d’applications, de tutoriaux et de manipulations est un plus.
b) La possibilité de programmation (création puis lecture d’un code en texte dans un langage de programmation propre) permettant une entrée des données intuitive et rapide est un atout. Elle peut offrir de nombreuses possibilités à l’utilisateur, par exemple, automatiser la modélisation de structures-types simples et répétitives ou encore ajuster la mise en page des résultats, en fournissant des sorties textes ou Excel adaptées à la sous-structure étudiée.
c) La confiance dans le logiciel assure un gain de temps non négligeable, en évitant certaines vérifications superflues. Pour cela, la présence de mises à jour régulières est un indicateur, tout comme l’existence d’une hotline technique disponible et réactive, capable de fournir une assistance ponctuelle sur une modélisation spécifique. La confiance ne dispense bien sûr pas des vérifications de modèle explicitées dans ce guide.
d) La version du logiciel peut également jouer dans le choix, dans le cas où certaines fonctionnalités ont été ajoutées/enlevées ou lorsque la stabilité et/ou la rapidité d’une version n’est pas satisfaisante.
e) Certains logiciels possèdent des bibliothèques complètes (matériaux, profilés, boulons, assemblages…) qui génèrent un gain de temps. Des fonctionnalités spécifiques aux ouvrages de génie civil sont aussi possibles, comme l’application de chargements automatiques réglementaires (types A(l), Bc, LM1, LM2…).
f) Selon le règlement qui s’applique au projet, le logiciel peut proposer des charges, des combinaisons et des vérifications pré-programmées. C’est un élément de confort, mais qui doit toujours être vérifié sur des cas simples.
g) Un affichage de la structure en pseudo-volumique est un avantage, car cela permet de vérifier visuellement le type et l’orientation des profilés ou barres. En outre certains logiciels permettent un export 3D qui constitue un support de communication très utile en réunion avec les parties prenantes (voir en complément le chapitre E.3 pour la partie BIM).
h) Un logiciel qui spécifie la ligne du fichier de données présentant une erreur ou la liste des objets mal modélisés (superpositions, …) dans le modèle spatial offre un réel avantage. Les messages d’erreur doivent être clairs et précis (si possible dans la langue de travail de l’ingénieur).
Retour d'expérience:
Le REX (Retour d’expérience) est important : les réunions ou fiches REX doivent permettre de tirer les enseignements positifs et négatifs de projets en cours ou terminés. Elles portent sur les méthodes employées, mais aussi les moyens informatiques utilisés ou encore la production réalisée.
$translationBooksB.7 Organisation du calcul
B.7 Organisation du calcul
C’est une étape indispensable à réaliser au démarrage de l’étude.
a) Réflexion préliminaire sur la modélisation
Une étape primordiale s’impose au modélisateur : celle de l’analyse du fonctionnement d’ensemble de la structure. Il serait effectivement insensé de démarrer la modélisation d’un ouvrage avant même d’en comprendre le comportement global. Un premier croquis manuel de la structure révèle dans un premier temps la bonne compréhension du fonctionnement et servira de trame à la construction du modèle.
Cette analyse de fonctionnement permet avant tout de distinguer les éléments principaux traduisant le comportement global de l’ouvrage. Parmi ces éléments principaux, on distinguera par exemple :
-
pour les ouvrages d’art : la structure porteuse du tablier, la structure des appuis, les contreventements ;
-
pour les bâtiments en béton armé et en béton précontraint : les poteaux, voiles et dalles ;
-
pour les charpentes de bâtiments : les poteaux, les poutres, les éléments de contreventement.
La modélisation s’appuie nécessairement sur des données d’entrée, a minima :
-
une note d’hypothèses générales, qui contient une description de l’objet, les règlements appliqués et les charges appliquées ;
-
des croquis ou des plans généraux de l’objet à modéliser ;
-
un principe général de construction ;
-
une ébauche de fonctionnement statique et éventuellement dynamique.
La modélisation ne se substitue pas à ces éléments de réflexion préliminaire.
BIM et modélisation : Le modélisateur peut être tenté d’employer les données d’entrée de façon automatisée pour construire son modèle. C’est un argument fréquent des éditeurs de logiciels. Dans ce cas, il devra être particulièrement vigilant à la qualité des entrants fournis (il n’est en effet pas rare de trouver des modèles 3D avec des non-sens géométriques) et au niveau de détail des données d’entrée (quantité de trémies par exemple). Dans le cas d’un traitement automatisé, il faudra être attentif à la procédure de construction de la géométrie, notamment au niveau des connexions. L’étape d’analyse du fonctionnement d’ensemble précédemment évoquée est ainsi le moyen de prévenir toute anomalie.
b) Validation des données d’entrée / Synthèse des entrants
Tous les documents définissant les hypothèses de la géométrie, des matériaux, des chargements doivent être référencés avec leur provenance, leur indice et la date d’émission.
Il convient de valider la cohérence de ces différents documents. Par exemple, les plans architecturaux et les plans du gros œuvre sont-ils cohérents entre eux ? Y a-t-il des décalages géométriques entre les différents fichiers de plans ? Les données sont-elles exhaustives ? Observe-t-on d’ores et déjà des infaisabilités (descente de charge au cheminement complexe, absence de contreventement…) ?
Ce travail de synthèse permet de mettre en évidence les données d’entrées manquantes et/ou susceptibles d’être modifiées et de définir les mesures conservatoires prises en compte pour pallier les données manquantes.
En fonction de cette analyse préliminaire, certaines décisions s’imposeront immédiatement au modélisateur : échanges avec le donneur d’ordre, révision de la géométrie de l’ouvrage (révision de la conception), entrée de données paramétrables…
Cette phase de synthèse prendra idéalement la forme d’une « Note de Modélisation » qui évoluera au cours de l’avancement du modèle. L’objet est de faire valider par tous les participants de l’étude les hypothèses très rapidement, afin d’éviter les modifications qui sont souvent longues et complexes.
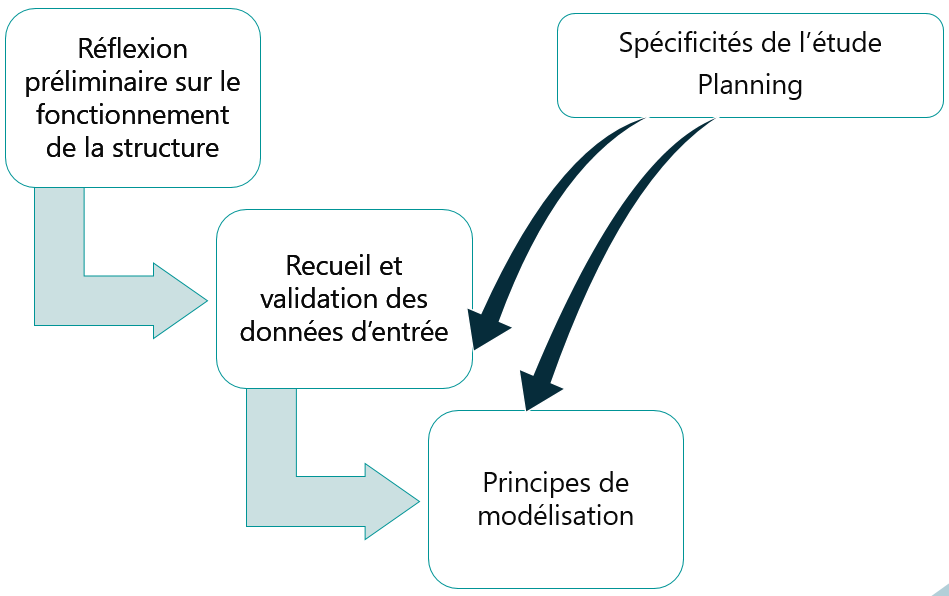
c) Spécificités de l’étude
Toutes les spécificités de l’étude doivent être listées au démarrage :
-
les contraintes physiques du projet (soutènements importants, zone urbaine, phasage de construction, …) ;
-
les contraintes de l’étude (planning serré, nombreuses interfaces, données manquantes, …) ;
-
les particularités de la modélisation (taille du modèle, non linéaire, séisme, …) ;
-
les exigences et les points sensibles du projet (structure très élancée, très dissymétrique, vents importants, etc.).
Il est nécessaire de montrer que la modélisation va prendre en compte tous ces points.
d) Planning de l’étude
Il doit faire apparaître clairement :
-
les dates des principales étapes de la modélisation (géométrie, matériaux, chargements, interface ou interaction sol-structure, combinaisons, etc..) ;
-
les dates jalons pour la réception des données d’entrées manquantes ou susceptibles d’être modifiées ;
-
les dates de diffusion des livrables servant de données d’entrées aux autres intervenants de l’étude (interface), et des autres livrables ;
-
la cohérence de l’étude avec les dates des travaux.
e) Principes de modélisation
Le but est d'expliquer les méthodes de calcul. On veillera à :
-
clarifier les principes de modélisation de la structure, les modalités de prise en compte des chargements, des combinaisons, … ;
-
justifier toutes les hypothèses simplificatrices ;
-
présenter si nécessaire des petits modèles tests validant les hypothèses ;
-
présenter l’enchaînement des calculs.
Chapter C. Good practices to create a model
C. Bonnes pratiques pour monter un modèle
Les différents niveaux d’études et la complexité associée du modèle ont déjà été définis avant l’étape de modélisation dans le contenu du chapitre B.
Ce chapitre C présente, en outre, les simplifications pouvant être adoptées pour créer un modèle structurellement représentatif de la conception de l’ouvrage réel, de son fonctionnement et des sollicitations qu’il subit.
C.1 Données d'entrée et unités
C.2 Modélisation des éléments principaux
C.3 Éléments finis et maillage
C.4 Modélisation des éléments non structuraux ou équipements
C.6 Connexions - liaisons - assemblages
C.8 Sections composées (poutre/dalle)
C.10 Comportement spécifique au cisaillement et à la torsion
C.12 Compléments liés aux éléments volumiques
C.13 Compléments liés aux calculs non linéaires
C.14 Compléments liés à la précontrainte
C.15 Compléments liés au calcul phasé
C.16 Compléments aux calculs dynamiques et sismiques
$translationBooksC.1 Données d’entrée et unités
C.1 Données d’entrée et unités
Test pour voir si AFGC prévenue.
Les données d’entrée doivent être cohérentes les unes par rapport aux autres, que ces valeurs soient définies dans le modèle lui-même ou bien qu’elles proviennent d’autres fichiers telle qu’une bibliothèque de profilés ou de données sortant d’un autre logiciel (*). Des éléments de méthodologie sont fournis précédemment au paragraphe B.7 Organisation du calcul.
(*) En particulier, une attention forte est à apporter aux unités et signes lors de l'introduction de matrices de raideurs modélisant les fondations ou une autre partie de la structure, surtout si elle provient de bureaux tiers n'utilisant pas le même logiciel. En plus, pour le sol, on vérifiera si ce sont des caractéristiques à long ou court terme.
Les caractéristiques des matériaux, en particulier pour le béton, doivent être cohérentes avec l’analyse menée (voir détails au paragraphe C.9).
Le système d’unités dans lequel les données sont exprimées doit être connu car celui-ci va également conditionner les unités des résultats de calculs. Mieux vaut privilégier l’utilisation des unités SI.
Il convient de veiller à la cohérence d’unités en efforts, longueurs, modules et raideurs.
$translationBooksC.2 Modélisation des éléments principaux
C.2 Modélisation des éléments principaux
C.2.1 Construction de la géométrie
La première étape de modélisation consiste à construire la géométrie du modèle par la définition des points, lignes, contours, aires et volumes. Les notions de nœuds, d’éléments et de mailles sont associées, quant à elles, aux éléments finis.
Dans certains logiciels, on peut faire une construction géométrique avant de créer les nœuds, éléments et mailles. Dans d’autres, on établit la construction géométrique en dehors du logiciel, au moyen de schémas ou de tableurs Excel, et on définit ensuite directement les nœuds, éléments et mailles dans le logiciel.
Dans tous les cas, les conventions de signes utilisées par le logiciel doivent être connues dès le démarrage de la modélisation (direction de la pesanteur dans le repère général, convention sur le signe des moments, efforts et contraintes).
Quelques notions générales :
-
Nœuds : leur présence est indispensable au niveau des appuis, à l’emplacement des joints et aux lieux de rupture de géométrie. Selon le logiciel, leur présence peut être nécessaire également aux emplacements choisis pour l’extraction des données. On se référera au § D.3.2 sur ce sujet. Selon le logiciel, il faut également prévoir un nœud aux emplacements d’introduction des charges. Enfin, selon le phénomène que l’on veut quantifier, par exemple pour des calculs en grands déplacements ou dynamiques, on est amené à devoir définir des nœuds intermédiaires sur les poutres pour bien le représenter. La définition des points de la géométrie intègre tous ces besoins de nœuds. Le nombre de nœuds doit toutefois être limité autant que possible de façon à ne pas alourdir le modèle ;
-
Eléments structurels : dans la plupart des modélisations hors volumique (barres, plaques, coques …), les éléments seront modélisés au niveau de leur fibre moyenne. C’est la méthode la plus sûre pour la bonne transmission des efforts entre les éléments et la prise en compte d'effets secondaires. Dans le cas de poutres pour lesquelles les charges sont localisées sur une face en particulier (hourdis de pont par exemple), il est loisible de définir l’élément au niveau de cette face et de procéder à un excentrement, si le logiciel ne le fait pas automatiquement. Le positionnement de la fibre moyenne des éléments désaxés est abordé au § C.7 Excentrements. Dans le cas des poutres de hauteur variable, la fibre moyenne n’est plus rectiligne et conduit à des repères locaux d'inclinaisons différentes, ce qui peut compliquer l’exploitation des résultats. Si l'on ne cherche pas à prendre en compte l'effet de voûte, on peut simplifier le modèle en conservant une fibre neutre rectiligne.
-
Voir également les exemples de calcul de grillages de poutres pour lesquels des simplifications peuvent également être admises (Lien vers les exemples).
C.2.2 Degré de simplification : trémies et évidements
Suivant la phase d’étude et le type de calcul mené (par exemple une stabilité ou une descente de charge), on ne modélisera pas forcément toutes les ouvertures.
Cas du bâtiment.
Pour les bâtiments, dès lors qu'elles sont prises en compte, il est conseillé, autant que possible, d’intégrer à la géométrie les trémies de taille non négligeable et pouvant remettre en cause le comportement de la structure (a minima dans les éléments de contreventement). Cette dernière sera découpée en fonction des intersections voiles/voiles, voiles/planchers, trémies, de façon à avoir un maillage le plus régulier possible.
Dans le cas de la modélisation d’un bâtiment, la définition des trémies est effectuée en fonction :
-
de leur taille (toute trémie dans un voile ou une dalle dont la plus grande dimension est inférieure à 1 m est couramment négligée) ;
-
de leur groupement spatial - des ouvertures de petites dimensions mais très rapprochées peuvent être considérées comme une seule ouverture dont les dimensions correspondent au périmètre de l’enveloppe ;
-
de leur influence sur le transfert d’efforts.
Une attention particulière doit être portée sur les linteaux des portes des voiles porteurs (et de contreventement), en effet ces linteaux sont généralement percés par de nombreuses réservations, ils peuvent alors ne plus être capables d'assurer leur rôle structurel, ce qui nécessite une modélisation adaptée.
Lorsque les réservations ne sont pas connues, les modélisations des bâtiments soumis à des efforts horizontaux (vent, séisme) doivent prendre en considération des mesures conservatoires concernant les grosses trémies (de ventilation généralement). Il est souvent nécessaire de réduire fictivement l'épaisseur des linteaux, voire de les supprimer des modélisations.
Exemple de regroupement d'ouvertures :
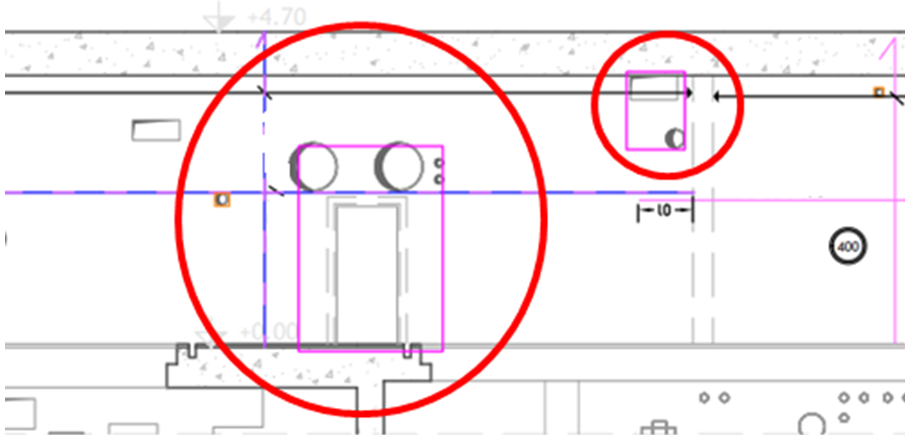
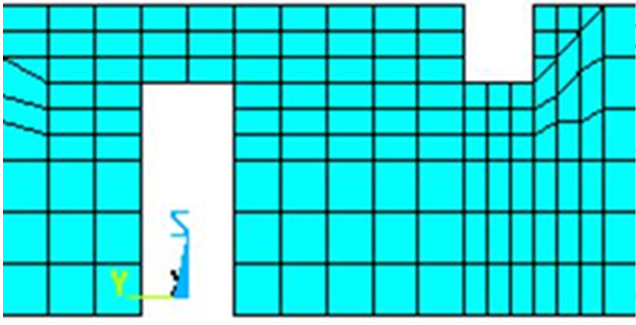
Exemple de structure avec des trémies conséquentes… qui ne peuvent clairement pas être négligées.
Cas de la construction métallique. Les recommandations de la CNC2M pour le dimensionnement des poutres en acier avec ouvertures dans l’âme selon la NF EN 1993 précise qu’une ouverture isolée présentant une dimension maximale inférieure à 10% de la hauteur de l'âme de la poutre n'est pas considérée comme significative. D’un point de vue modélisation de ces ouvertures, la même règle peut être appliquée. Néanmoins, cette ouverture doit être prise en compte lors de la vérification de la section selon les règles habituelles de la NF EN 1993.
Dans le cas d’un dimensionnement avec collaboration de paroi, avec des diaphragmes constitués de plaques nervurées, conformément à l’EN 1993-1-3 § 10.3.4, des ouvertures de petites dimensions, régulièrement réparties, dont la surface cumulée représente jusqu’à 3% de la surface totale peuvent être disposées sans calcul particulier du diaphragme sous réserve que le nombre total de fixations des panneaux constituants le diaphragme soit respecté. D’un point de vue modélisation, de telles ouvertures peuvent donc ne pas être prises en compte.
C.2.3 Degré de simplification : courbure, dévers, …
Au stade de la modélisation de la géométrie, à l'échelle d'un élément structurel, les éléments courbes devront être représentés de façon aussi précise que possible, sachant que l’étape du maillage discrétisera ces courbures par une succession de segments droits, en fonction de la taille de maille choisie et des nœuds déjà définis. La partie des Eurocodes NF EN 1993-1-6 traitant de la résistance et de la stabilité des structures en coque donne quelques indications sur la prise en compte de la courbure.
Pour les ouvrages d’art il convient de s’interroger sur les effets du dévers, de la courbure et du biais et leur non-prise en compte doit être dûment justifiée. Pour les ouvrages rectilignes courants, le dévers étant normalement limité lors de la conception, il est généralement possible de le négliger. En revanche pour les ouvrages d’art courbes :
-
en fonction du niveau des appuis et du degré hyperstatique de l’ouvrage, le dévers ne peut être négligé ;
-
que l’ouvrage soit courbe sur toute ou partie de sa longueur, la force centrifuge et le dévers doivent être pris en compte. Il est à noter que pour la force centrifuge, la norme NF EN 1991-2 indique que la force centrifuge, effets dynamique inclus, peut être négligé si le rayon de courbure en plan de la chaussée est supérieur à 1500 m ;
-
la courbure et le biais créent des moments de torsion non négligeable dans la structure même lorsque le chargement routier est centré transversalement sur l’ouvrage.
Pour fixer un ordre de grandeur, on peut considérer qu'un ouvrage est peu sensible:
-
au biais, lorsque celui-ci reste supérieur ou égal à 70 grades ;
-
à la courbure, quand l'angle entre deux appuis adjacents est inférieur à 0.3 rad.
Il est cependant difficile d'édicter des règles générales et le lecteur est invité à consulter les guides de conception propres à chaque typologie d'ouvrage (PRAD, PIPO, PICF, …).
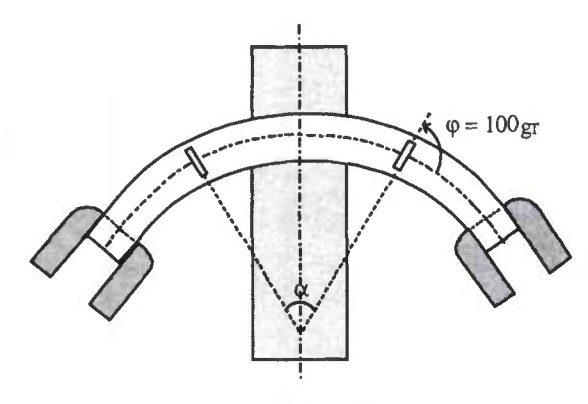
Illustration de l'ouverture angulaire entre deux appuis
L'exemple de grillage de poutres "Modélisation d'un même ouvrage suivant différentes approches" (en Partie 3) illustre les effets du biais et du dévers sur un exemple de ponts à poutres.
C.2.4 Degré de simplification : alignement des voiles d’épaisseur variable
Dans le cas d’un bâtiment, les règles de l'art préconisent un alignement des éléments verticaux de façon à assurer une descente de charges simple. Toutefois, des exigences diverses (équipements abrités, espace disponible…) peuvent amener à certains décalages d’un niveau à l’autre. Une simplification de la géométrie lors de la modélisation peut cependant être faite (notamment afin d’éviter un maillage trop hétérogène) par alignement des éléments verticaux et même des éléments horizontaux.
Cette simplification aboutit à une bonne représentation du fonctionnement global de la structure, sous réserve du respect des dispositions constructives recommandées. Il faut toutefois faire une vérification locale du bon fonctionnement du transfert des efforts et réintégrer les excentrements réels dans cette vérification locale.
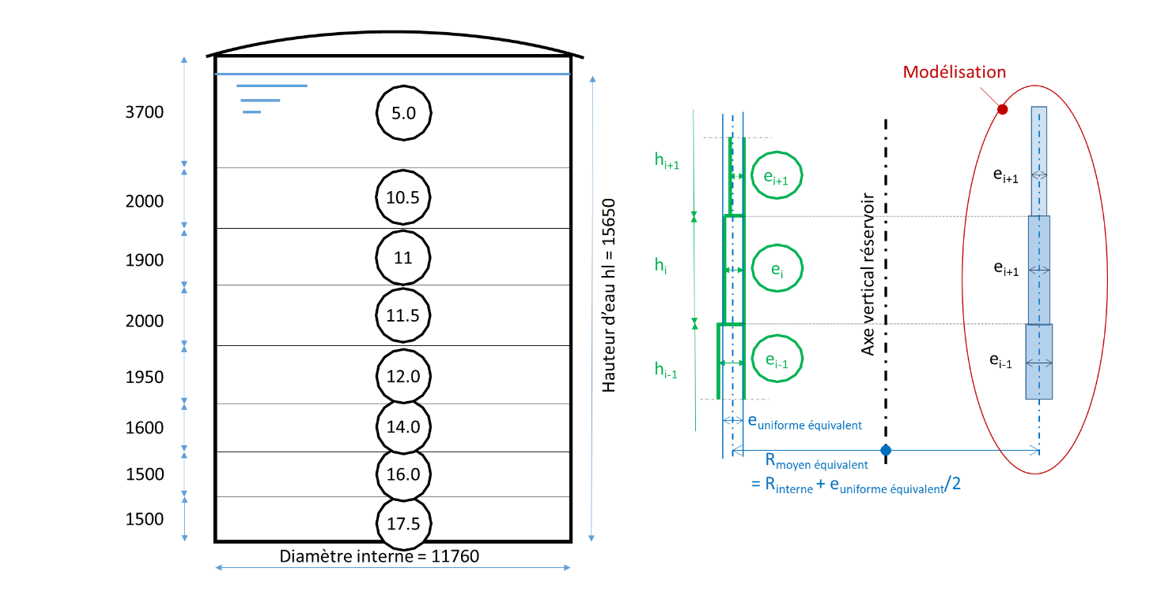
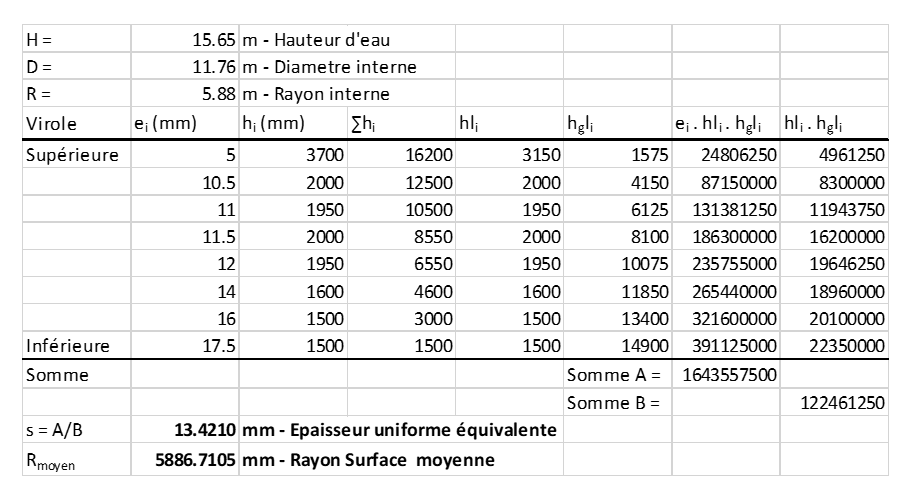
De même, pour les structures métalliques, en présence de semelles ou de tubes d’épaisseur variable (viroles par exemple), il est d’usage d’utiliser un plan moyen unique.
Par exemple, un réservoir composé de viroles ayant des hauteurs et des épaisseurs différentes sera modélisé par des surfaces cylindriques présentant :
-
un rayon identique égal à un rayon moyen équivalent ;
-
les épaisseurs appropriées selon la hauteur (épaisseur des viroles).
La valeur du rayon moyen équivalent peut être définie d’après le Guide Séisme Réservoirs de stockage DT108 qui donne des exemples de détermination d’une épaisseur uniforme équivalente, ce qui permet de définir la valeur du rayon moyen équivalent = Rayon interne de la virole + Demi-épaisseur uniforme équivalente (voir exemple ci-après) :
C.2.5 Utilisation de la symétrie
Comme évoqué dans la Partie 1 A2. Dimensionnalité de la modélisation, dans le cas où la structure présente, dans sa géométrie, un plan ou des plans de symétrie, il peut être très intéressant, pour limiter les temps de calcul et la taille des modèles, d’utiliser cette symétrie, en ne modélisant qu’une partie de la structure et en définissant des conditions appropriées aux limites sur le plan de symétrie.
On prêtera cependant une attention au fait que le chargement doit aussi être symétrique et que la solution obtenue sera symétrique (par exemple, les modes propres antisymétriques n’apparaîtront pas).
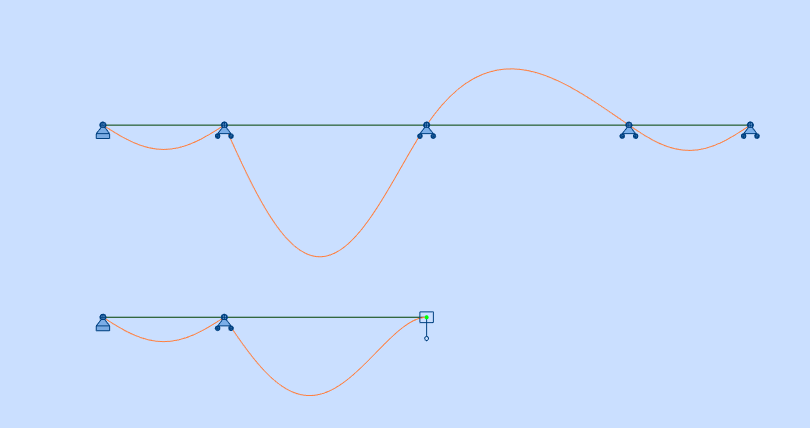
Exemple 1 : Pont à 4 travées, symétrique
Les travées font 60/100/100/60 m. Le pont est symétrique par rapport à son point médian.
On pourrait être tenté de modéliser la moitié du pont, en plaçant une condition d’appui de symétrie en ce point (à droite sur la figure, translation verticale bloquée, rotation bloquée) :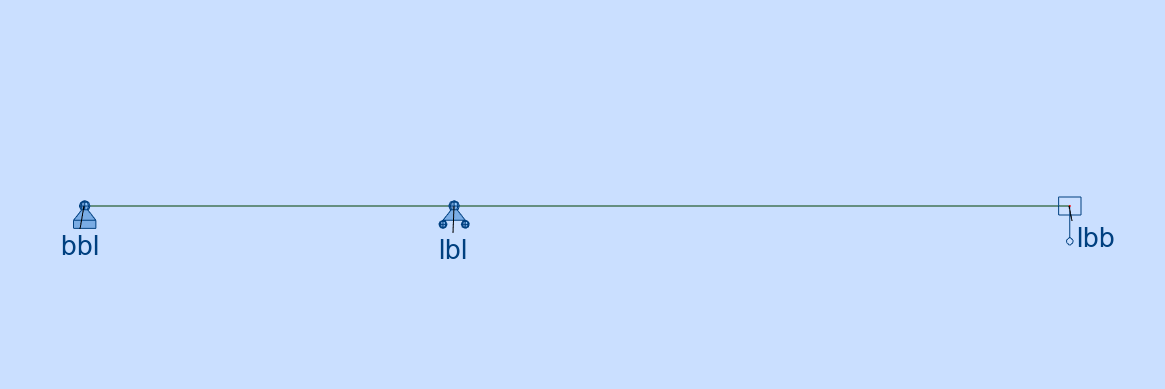
Cas de charge symétrique :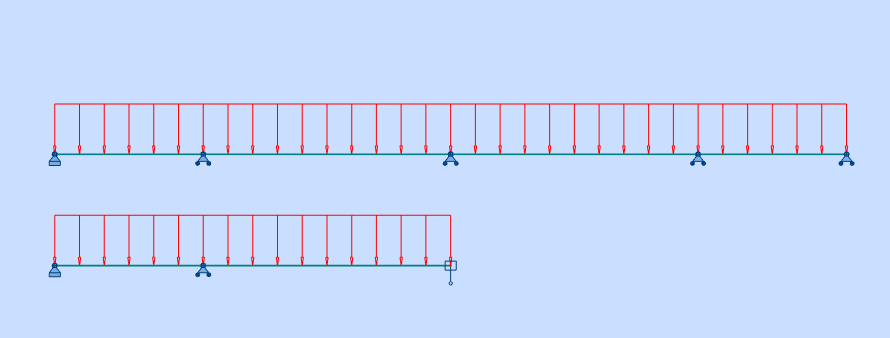
Dans ce cas, les résultats sont identiques pour les deux structures.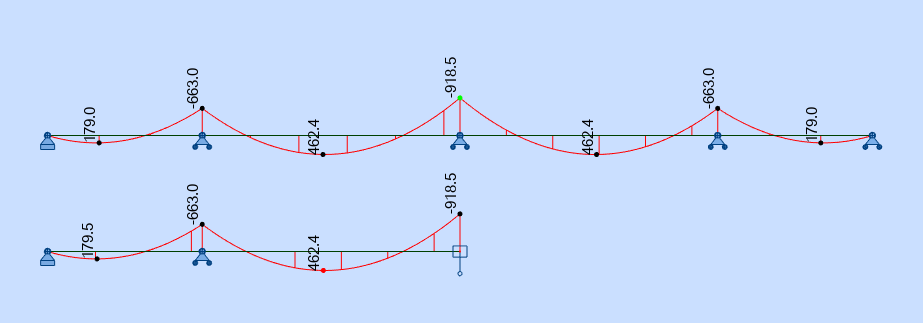
Cas de charge dissymétrique :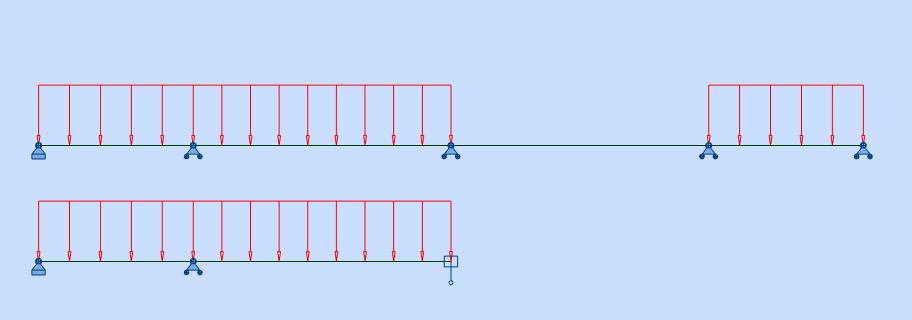
Dans ce cas, on note un écart notable dans les résultats :
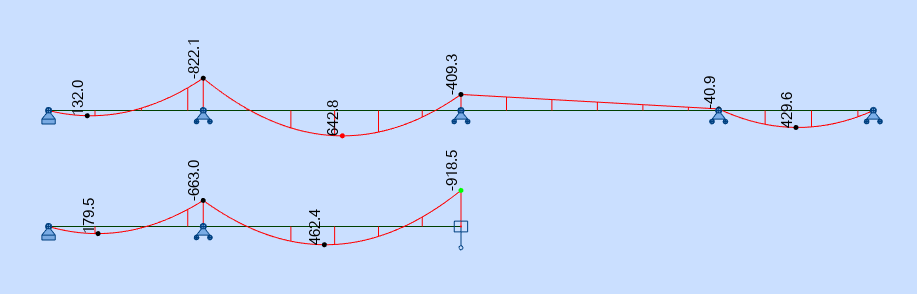
L'examen des lignes d’influence du moment sur le second appui dans les deux configurations fournit une explication immédiate :
Exemple 2 : Radier
Radier de forme carrée, modélisé par des éléments coque.
Les nœuds possèdent 6 degrés de liberté (ux, uy, uz, rx, ry, rz).
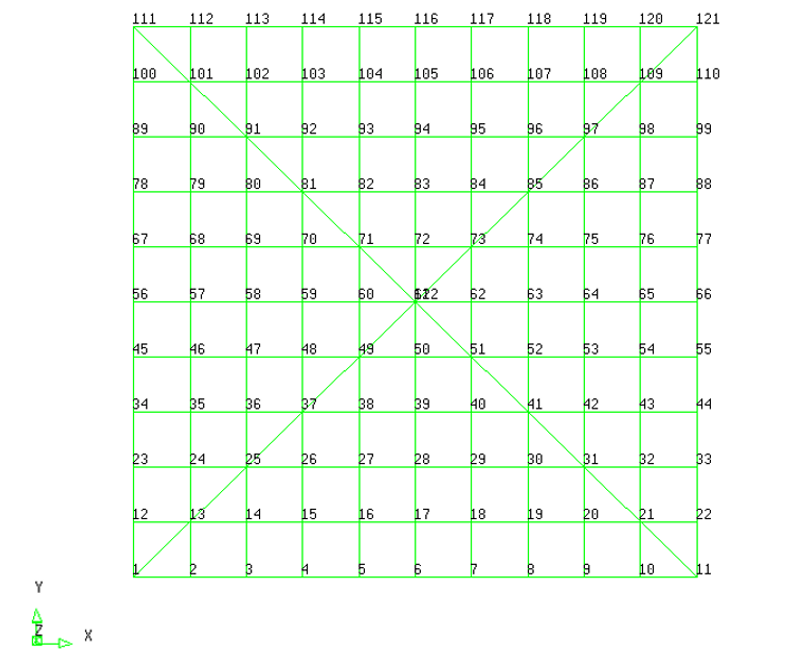
Par sa forme, il présente des plans de symétrie. Nous proposons de faire passer un plan de symétrie comme indiqué sur la figure ci-après :
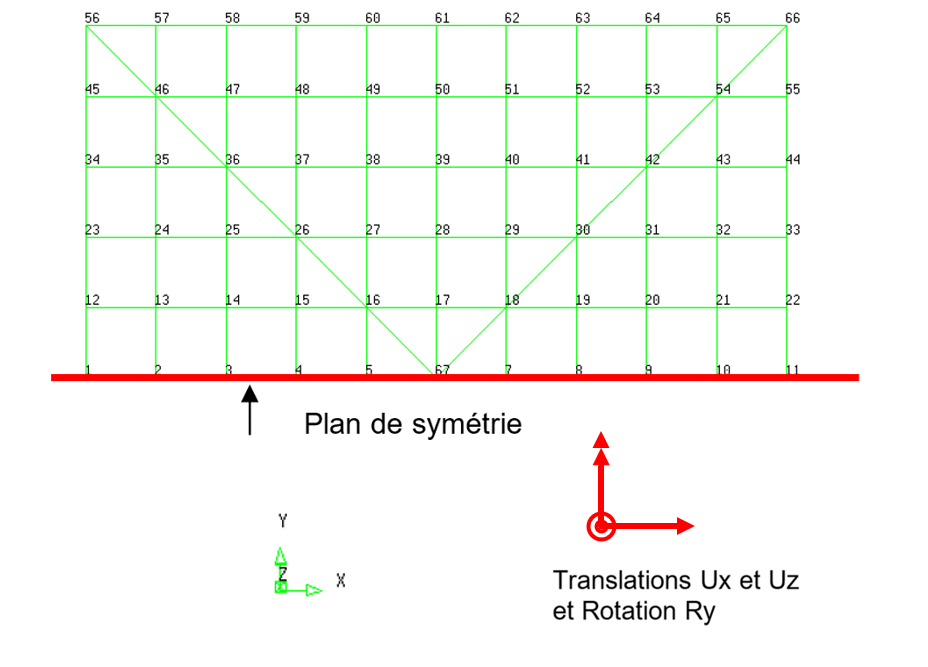
Le radier peut alors être soumis à un chargement qui est soit symétrique, soit antisymétrique.
Par exemple :
-
si l’on applique un moment autour de l’axe Y, le chargement est symétrique ;
-
par contre, si l’on applique un moment autour de X dans le sens direct, le radier bascule en montant du côté des nœuds Y>0 et en descendant du côté des nœuds Y<0. Le chargement est alors antisymétrique.
Les conditions à appliquer aux nœuds situés sur le plan diffèrent.
Dans le premier cas, les nœuds situés sur le plan de symétrie seront :
-
libres suivant les translations ux, uz et la rotation autour de y ;
-
bloqués suivant la translation uy et les rotations autour de x et de z.
Dans le deuxième cas (chargement anti-symétrique), les nœuds situés sur le plan de seront :
-
bloqués suivant les translations ux, uz et la rotation autour de y ;
-
libres suivant la translation uy et les rotations autour de x et de z.
Il est important de noter que la prise en compte des différents types de chargements conduit, dans le cas présent, à réaliser deux modèles se différenciant uniquement par les conditions aux limites associées aux chargement, ce qui n’est pas rédhibitoire.
Dans le cas de calculs dynamiques représentant un bloc de sol, on prêtera une attention particulière aux conditions aux frontières latérales du bloc pour traduire correctement les conditions de non-réflexions des ondes (voir Partie 1, chapitre F.8). La définition de ces éléments couplant un ressort et un amortisseur sortent du cadre de ce guide.
© doc Plaxis
C.2.6 Modélisation des fondations
La plupart du temps, le sol est représenté dans les modèles par des conditions d’appui (appuis simples ou encastrements).
Avant de modéliser les fondations et le sol en détail, il faut évaluer la sensibilité de la structure vis-à-vis de la souplesse de ses fondations.
Si la structure y est sensible, on doit prendre en compte le sol :
-
soit indirectement par des appuis élastiques ou des matrices de raideur, dont les paramètres auront été calibrés par ailleurs.
-
soit directement en modélisant un certain volume de sol (blocs de sol + éléments frontière). A noter que ce type de calcul nécessite des logiciels particuliers.
Dans le cas où la fiabilité des paramètres de sol est faible et/ou leur variabilité forte, il est recommandé d'effectuer un calcul en fourchette.
Dans certains cas, le fait de devoir modéliser la structure avec ses fondations relève d’une obligation règlementaire. Se référer à la norme NF-EN-1998-5 §6.
Pour plus de détail sur les conditions aux limites, on se référera au § C.5 Conditions aux limites.
C.2.7 Modélisation des contreventements par barres
Piège! Dans le cas des structures métalliques, certains éléments très élancés (contreventements ou câbles) ne peuvent travailler qu’en traction. Si la modélisation n’en tient pas compte, la résistance et la raideur du contreventement sont surestimées, aussi bien pour les calculs statiques que modaux.
Illustration par l'exemple sur une structure simple contreventée
Modélisation « tel que construit », avec des barres croisées, mais sans tenir compte du fait que les barres de contreventement vont flamber dès qu’elles vont être mises en compression :
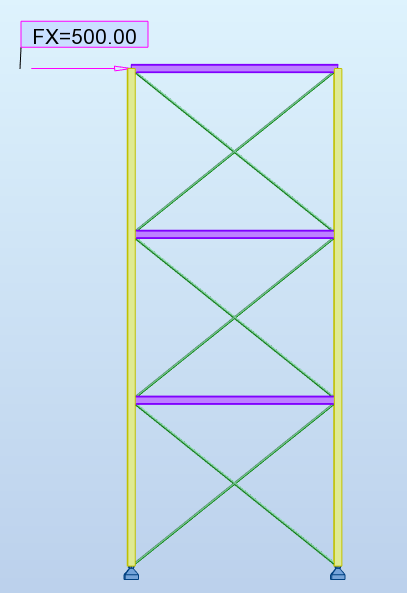
Dans ce cas :
-
la flèche horizontale vaut 4.4 cm ;
-
l’effort dans les diagonales maximal vaut 321 kN.
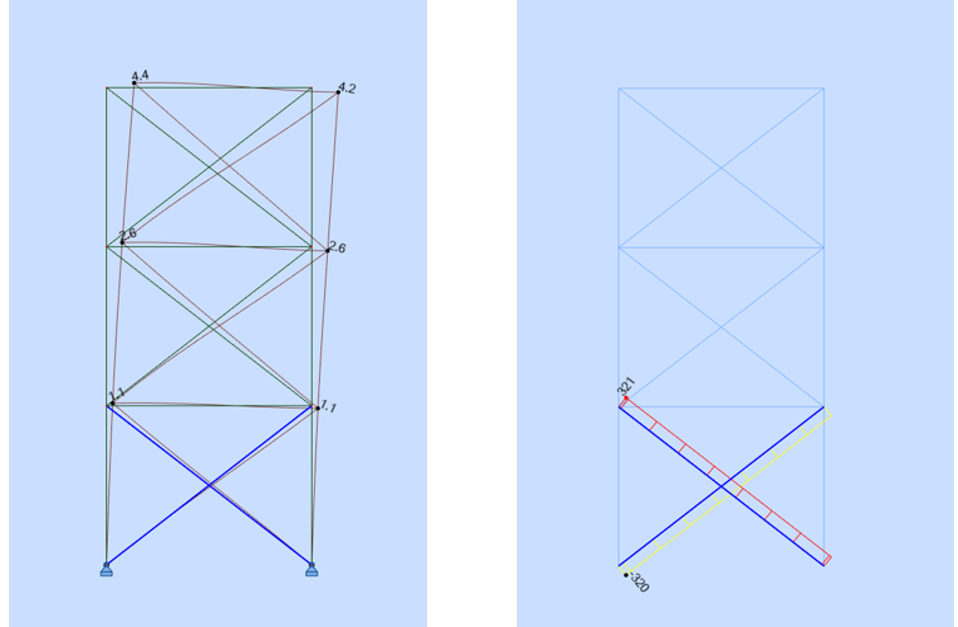
Du fait du flambement des diagonales comprimées, pour le comportement global, il faut supprimer une diagonale sur deux, idéalement celles qui sont comprimées mais ce n’est pas une obligation :
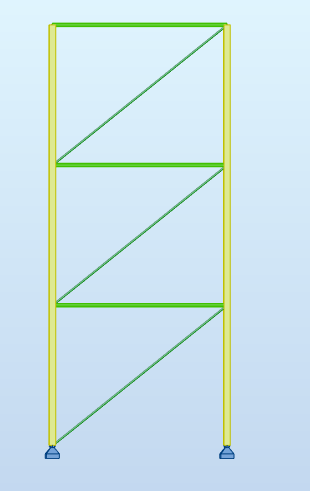
Dans ce cas le déplacement passe de 4.4 à 7.6 cm. La raideur de cette palée est donc divisée par 7.6/4.4=1.73, avec toutes les conséquences que cela peut avoir sur la vérification des déformations et les calculs de périodes propres pour le calcul sismique (Erreur de l’ordre de 1.730.5=1.31).
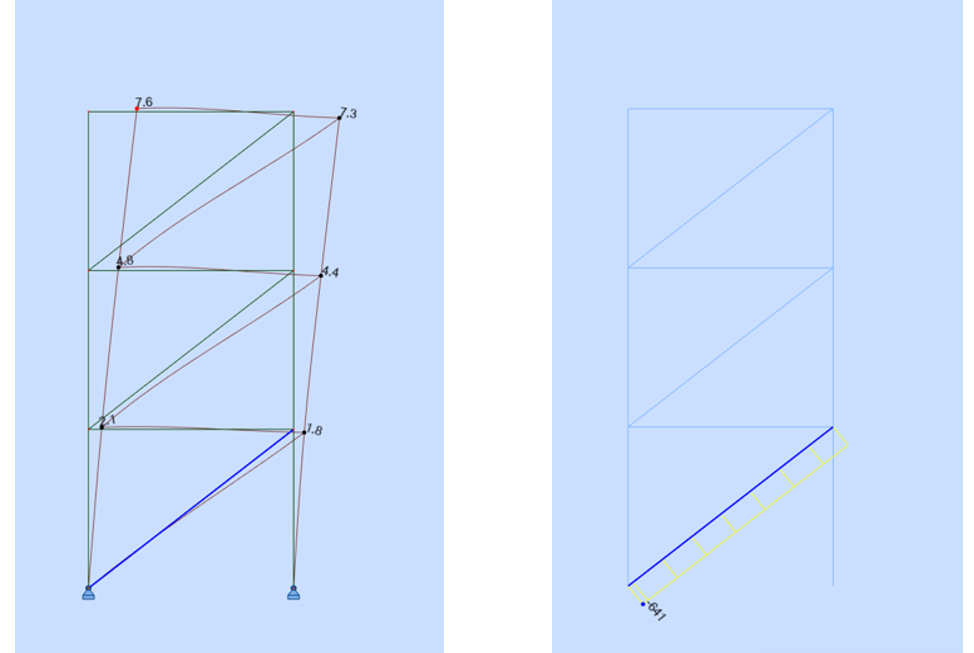
De manière corollaire, les efforts dans les diagonales passent de 321 à 641 kN, soit également de l’ordre du double, en toute logique.
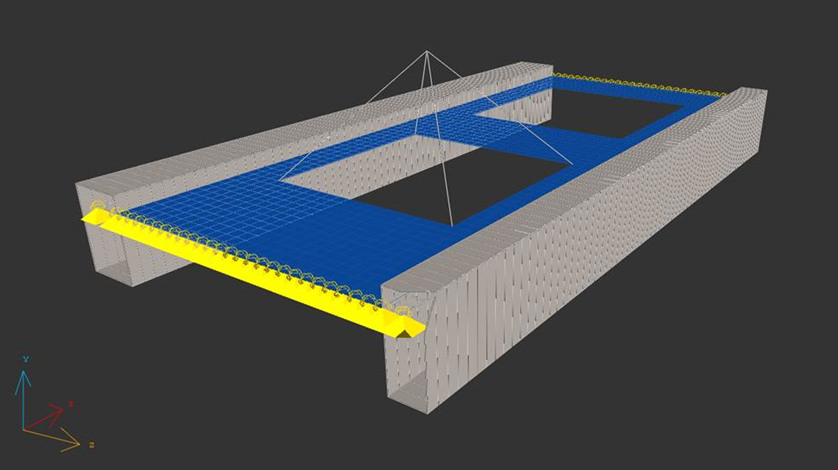
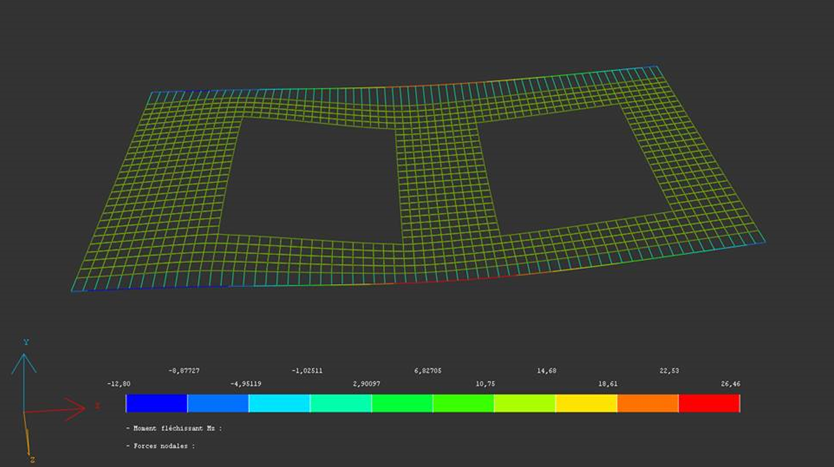
C.2.8 Zoom structurel – Modèle local
Pour des problématiques de fonctionnement local d’un élément ou d’un assemblage d’une structure, il peut être intéressant de bâtir un modèle très local, en lui imposant des conditions aux limites qui reproduisent l’interaction avec le reste de la structure.
C’est par exemple le cas des entretoises de tabliers mixtes, des zones d’appuis des ouvrages complexes ou des encastrements arc/tablier dans un bow‐string.
Il arrive parfois que l’ouvrage soit modélisé dans sa globalité à l’aide d’éléments poutres sauf une partie modélisée à l’aide d’éléments plaques. Dans ce modèle intégrant des éléments de type poutre et plaque, il convient de vérifier attentivement que la transmission des efforts de l’un à l’autre s’effectue convenablement (par exemple en s’assurant de la rigidité suffisante d’éléments fictifs de liaison). Voir C.6.7.
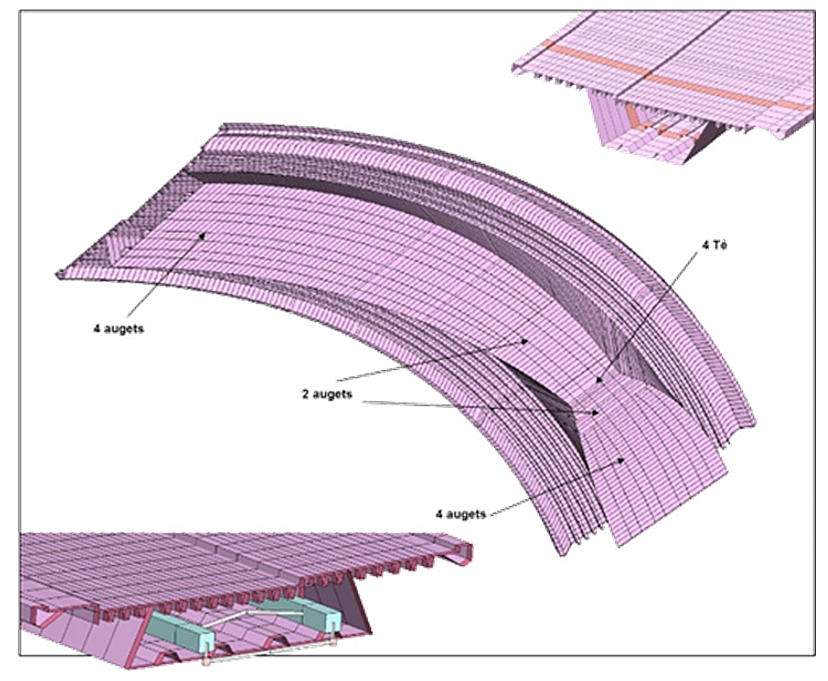
Modélisation globale en éléments poutres (vue pseudo-volumique)
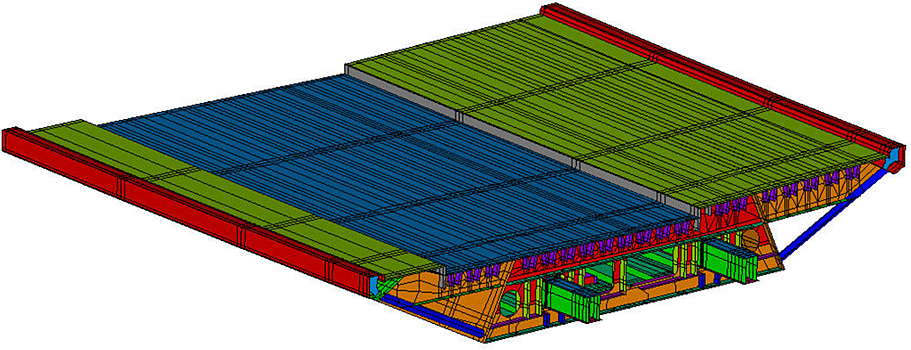
Modélisation locale en éléments plaques (vue des surfaces moyennes)
C.3 EF et maillage
C.3 EF et maillage
C.3.1 Types d’éléments finis
Avant toute chose, l'utilisateur d'un programme EF doit veiller à la bonne compréhension du vocabulaire utilisé par le logiciel : barre/poutre, plaque/coque, surface/panneau, etc…
Une partie théorique est consacrée aux éléments finis en Partie 1 § A.3. En particulier, les différents types d’éléments y sont décrits.
L’utilisateur est invité à consulter la notice de son logiciel concernant chacun des éléments finis pour vérifier ses degrés de liberté, et les efforts et déformations qu’il prend en compte, éventuellement avec des options à activer ou désactiver.
Les questions à se poser sont les suivantes. En fonction du problème à résoudre, veut-on :
-
que l’élément travaille en efforts normaux, en flexion ou les deux ?
-
qu’il prenne en compte le cisaillement et la déformation associée ?
-
qu’il se déforme hors de son plan ou dans son plan ?
C.3.2 Forme du maillage
La première partie du présent guide (Partie 1 § A.3) a détaillé les différentes formes possibles de maillage pour les éléments surfaciques (triangles, quadrilatères) et pour les éléments volumiques, ainsi que les conditions d’utilisation de ces différentes formes.
On ne décrit ici que les règles à suivre, une fois que le type de maillage a été choisi.
La plupart des logiciels ont des mailleurs automatiques, avec parfois de nombreuses options pour améliorer et personnaliser le maillage.
Le conseil principal est de rechercher le maillage le plus régulier possible, mais de raffiner néanmoins là où cela est nécessaire.
Dans certains cas et en fonction du logiciel utilisé, il est plus intéressant de mailler manuellement. On obtient ainsi des mailles régulières, dont on peut maîtriser la numérotation, ce qui facilite l’application des charges et l’exploitation des résultats.
Il y a des règles sur l’élancement des éléments (le rapport entre la plus petite et la plus grande dimension doit être supérieur à 1/3) et sur la distorsion (respect de la planéité des éléments). Les éléments distordus peuvent nuire à la pertinence des résultats. Pour un calcul non linéaire, par exemple, si un élément très distordu au départ se trouve dans une zone à forte déformation, la distorsion de cet élément peut s’accentuer entraînant une interruption du calcul, du fait d’un dépassement des critères limites. Certains logiciels le signalent. Il y a également des règles à respecter sur les angles ou ratio d'aspect des éléments. Certains logiciels peuvent tester l'ensemble des mailles vis à vis de ce critère, le cas échéant, en le pondérant par la surface relative de l'élément fini.
Exemple de détection d'EF ne répondant pas à un critère de ratio donné
Le ratio d'aspect d'un triangle est la valeur 2Ri/Ro, où Ri est le rayon du cercle inscrit au triangle et Ro le rayon du cercle circonscrit. Cette valeur est comprise entre 0 et 1. Plus la valeur est proche de 1, meilleure est la qualité du triangle ; c'est le cas pour les triangles équilatéraux. A contrario, lorsque l'aire du triangle est nulle, le ratio d'aspect vaut 0.
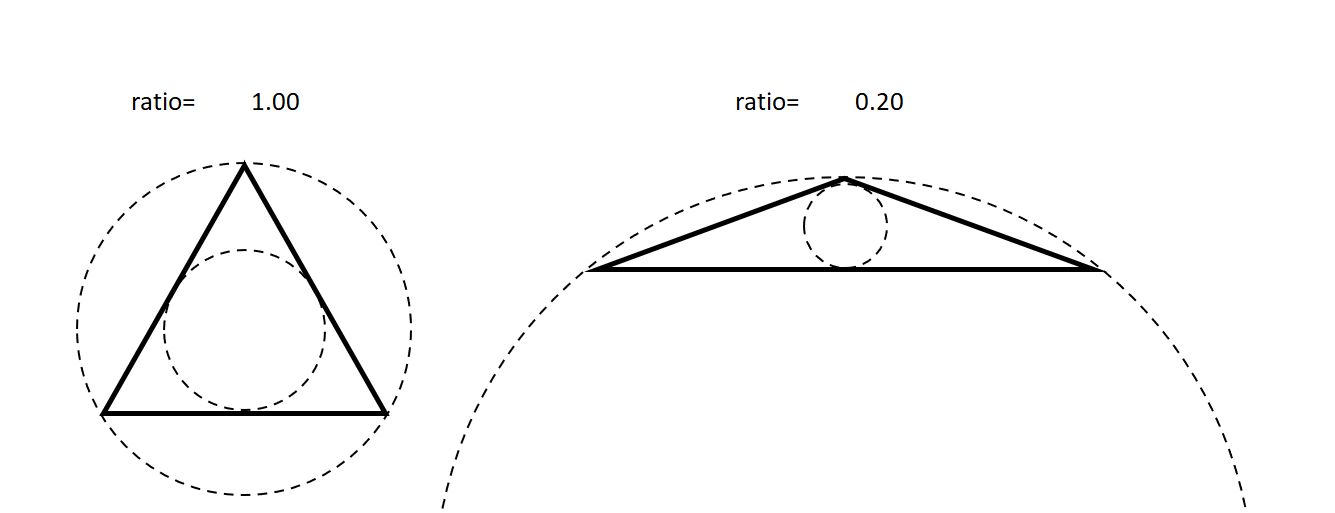
Illustration de la définition du ratio d'aspect
On peut retenir qu'un triangle est dégénéré quand son aire tend vers 0.
Dans tous les cas, il faut regarder la forme et l’allure du maillage.
Si l’allure n’est pas bonne, il est toujours possible de tester une autre option de maillage, de créer des nœuds ou de redécouper les plaques pour que le maillage s’améliore.
Le rapport entre la plus petite et la plus grande dimension d'un élément doit être supérieur à 1/3 et le ratio d'aspect doit tendre vers 1.
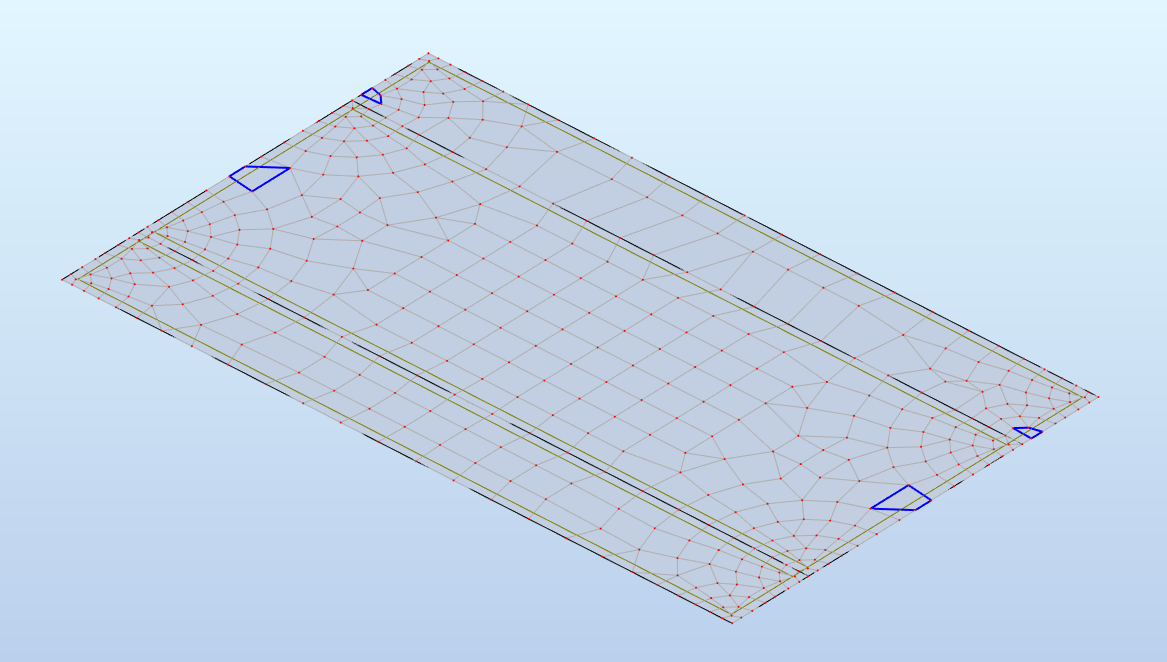
Exemple: soit un parallélépipède de 160x160x160 mm3 avec une face présentant un cercle. On souhaite avoir une taille moyenne de maille d’environ 40 mm sauf au centre du cercle où on désire avoir une taille moyenne de 2 mm. 1er maillage : la modélisation des surfaces est réalisée de manière élémentaire. Dans un premier, le maillage de la surface circulaire est effectué avec une taille de maillage de 2 mm. On procède ensuite au maillage des surfaces restantes avec une taille moyenne de maille de 40 mm (en général, le maillage des surfaces va s’effectuer en suivant l’ordre de création des surfaces). 2ème maillage : la modélisation des surfaces est améliorée. Le maillage est piloté en partant de la surface centrale.
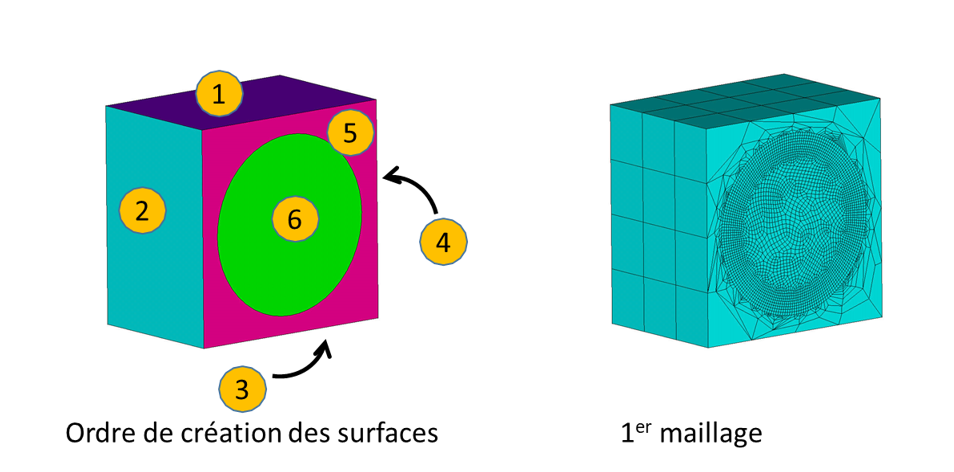
Modélisation surfacique élémentaire = Maillage non régulier + éléments dégénérés
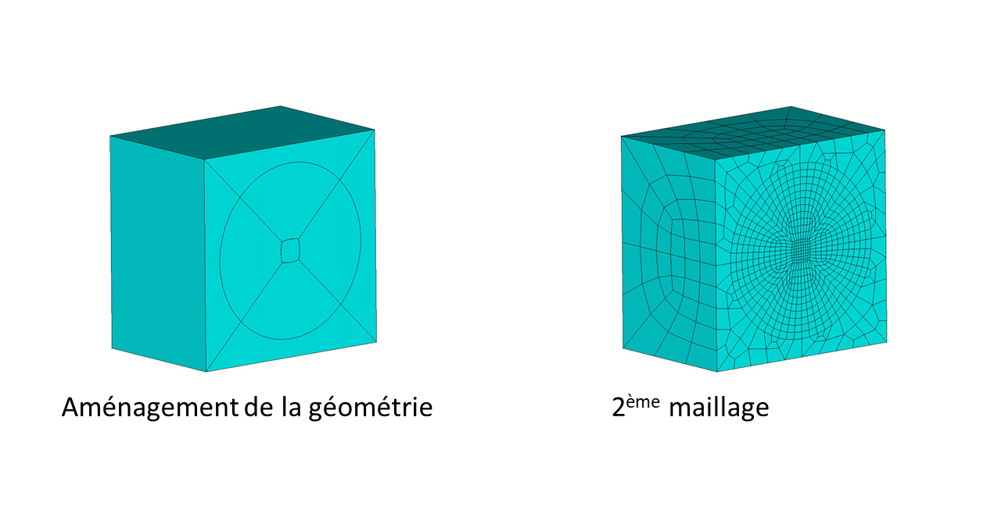
Modélisation surfacique améliorée + Maillage piloté = Maillage et éléments satisfaisants
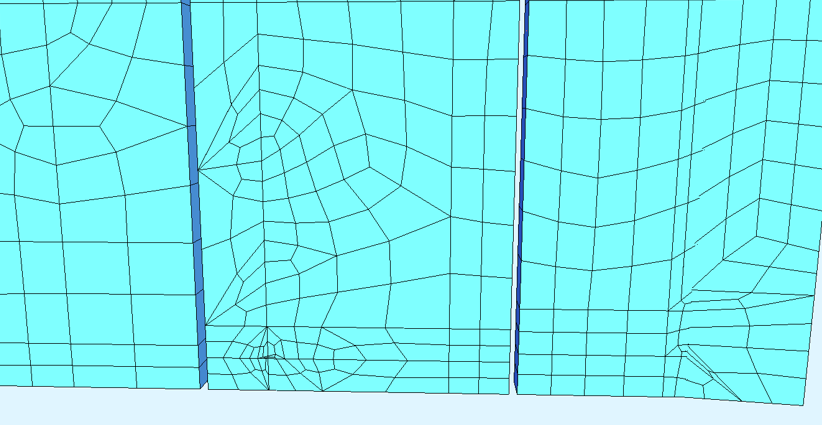
Exemple de maillage dégénéré
Un bon maillage est toujours « esthétique », il ne doit pas choquer visuellement.
C.3.3 Taille du maillage
Les objectifs des calculs doivent rester présents à l’esprit pour fixer la taille du maillage.
Tout d’abord, dans un modèle, il faut distinguer les éléments pour lesquels on veut des résultats des éléments qui sont là pour reproduire la rigidité et la masse de la structure.
Pour des éléments surfaciques et pour les éléments où l’on veut des résultats, il est d’usage de respecter une taille de maillage comprise entre 1 fois et 2,5 fois l’épaisseur de l’élément.
Pour les éléments pour lesquels on n’attend pas de résultats, on peut adopter des tailles plus grandes.
Les zones présentant un intérêt particulier dans l’analyse des résultats et susceptibles de présenter un fort gradient de contraintes et de déformations doivent donc présenter un raffinement de maillage suffisant et le moins possible d’éléments dégénérés.
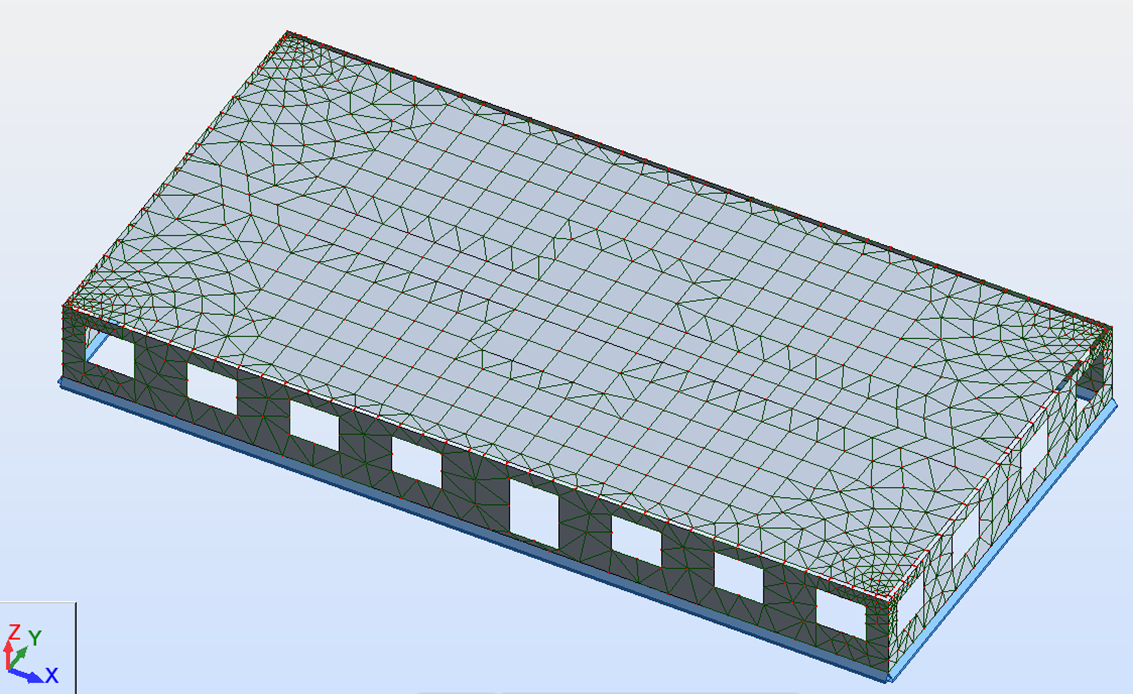
Exemple d’un maillage raffiné dans les coins du bâtiment via un raffinage à partir d’un point émetteur (raffinage du maillage sur une approche concentrique) afin d’appréhender les problèmes de gradient thermique dans les planchers:
Il convient de veiller à ce que l’évolution du maillage d’un point à l’autre du modèle soit progressive. Lors du passage d’une zone à l’autre, le maillage ne doit pas présenter de variation trop brutale.
La taille du maillage doit aussi être adaptée aux capacités du logiciel et au temps de calcul disponible. Il peut s'avérer utile, avant de se lancer dans le modèle réel, de produire un modèle à la géométrie très simplifiée (voiles parallèles ou orthogonaux, absence des poutres et trémies…) et de lancer les calculs, pour vérifier que le logiciel arrive au bout - et si c'est le cas, dans un délai raisonnable - puis qu'il est capable de traiter les résultats de manière fluide, en particulier si l'on a des calculs multimodaux à produire.
Une analyse de sensibilité (en divisant ou multipliant par deux la taille de la maille et en comparant les résultats - voir paragraphe suivant sur les tests de finesse) permet de caler la taille optimale sans mobiliser des ressources superflues.
Pour les éléments filaires en calcul linéaire, le problème est moindre, car les résultats des éléments finis découlent de la théorie des poutres et ne dépendent pas du maillage. En revanche, l’affichage des résultats peut être trompeur et une règle classique est d’avoir une discrétisation de l'ordre du 1/10ème de la portée.
Pour les calculs non-linéaires, il est d’usage de raffiner le maillage à proximité des zones de plastification.
Pour la modélisation du sol, en calcul sismique, on respectera une taille de maille inférieure ou égale au 1/10ème de la longueur d’onde excitatrice (voir Partie 1 § F.8).
C.3.4 Test de finesse du maillage
Un test souvent réalisé consiste à procéder à deux calculs identiques sur le même modèle, à la différence près que pour l’un d’entre eux, la finesse du maillage est améliorée dans un rapport d'un à deux. Les résultats principaux donnés par ces deux calculs sont comparés sur les zones d’intérêts.
Cet exercice permet d’ajuster la finesse du maillage aux objectifs de l’analyse. Le temps de calcul variant exponentiellement avec le nombre de degrés de liberté du modèle, la réduction du nombre d’éléments, si elle n’induit pas de perte sur la qualité des résultats, peut être appréciable en termes de temps d’immobilisation de l’ordinateur et en termes d’espace disque nécessaire au stockage des résultats.
Inversement, il peut s’avérer nécessaire d’affiner le maillage afin que les résultats soient valides mais généralement ce raffinement ne sera réalisé que sur les zones d’intérêts.
Les indicateurs de qualité de maillage fournis par les logiciels portent sur la forme et la distorsion des éléments, et non pas sur la pertinence de la taille du maillage. Le test de finesse est donc toujours utile, notamment pour les gros modèles.
A noter l’existence de quelques rares logiciels qui disposent d’une capacité de maillage adaptatifs en fonction des chargements et des déformations (cette option est plutôt utilisée pour des calculs non-linéaires).
Illustration
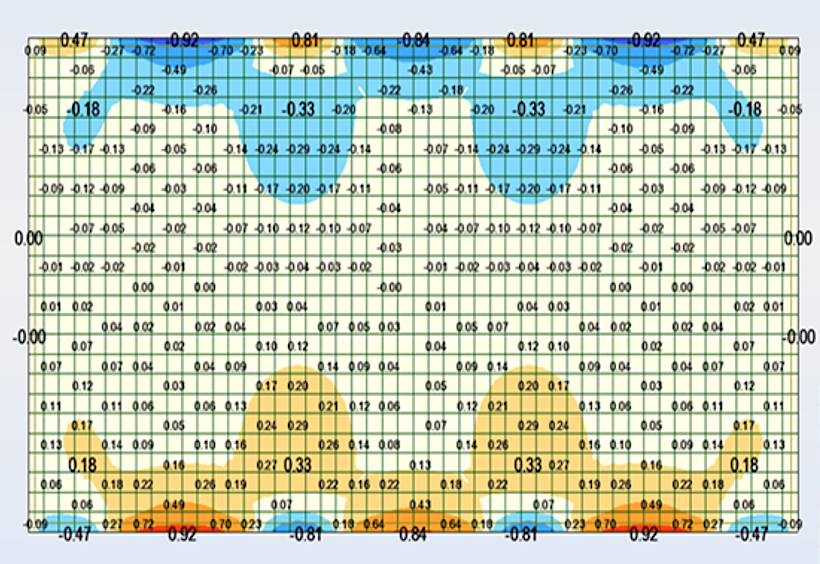
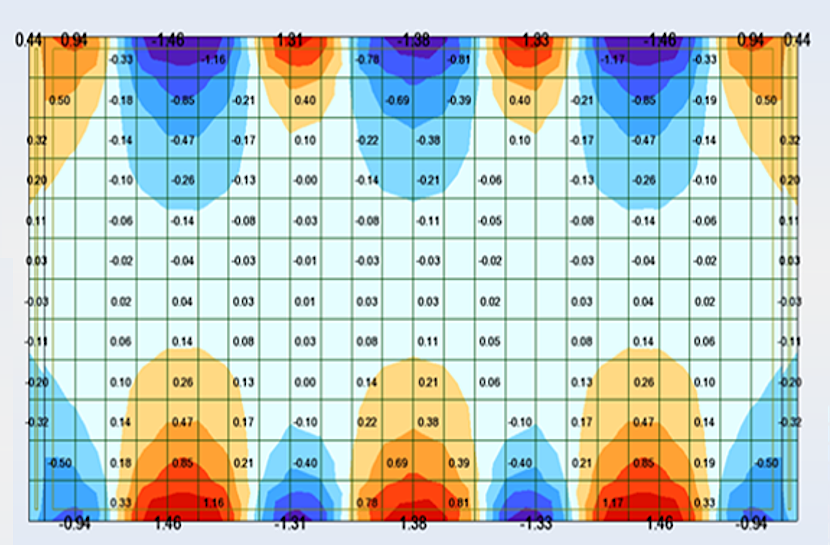
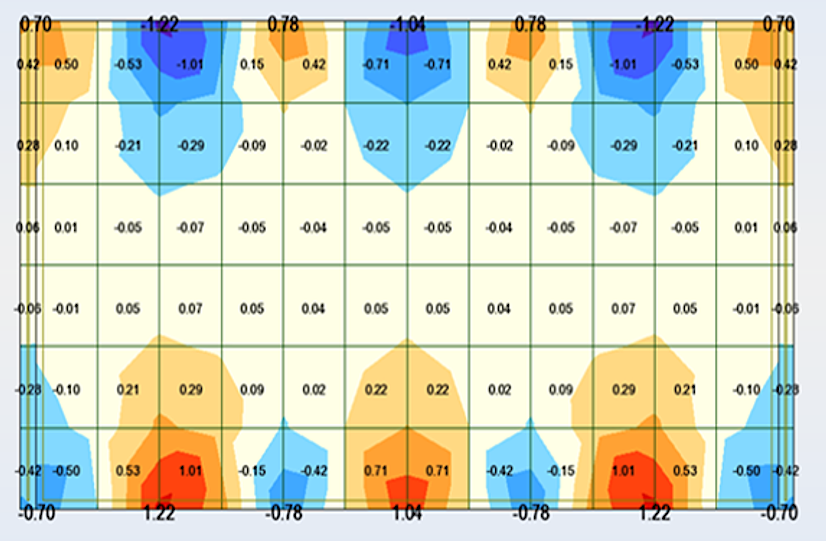
Exemple de l’impact de la taille du maillage sur les résultats dans un plancher - de haut en bas, maillage de 20, 40 et 80 cm, respectivement. Le cisaillement maximal qui est égal à 0.92 MPa avec un maillage de 20 cm passe à 1.49 MPa avec un maillage de 40 cm et à 1.22 MPa pour un maillage de 80 cm.
C.3.5 Orientation des repères locaux
L’orientation des éléments a une répercussion importante lors du post-traitement des résultats.
La vérification des repères locaux doit se faire de préférence avant l'introduction des chargements du modèle, ces derniers pouvant être subordonnés aux axes locaux des plaques.
Pour les éléments filaires, l’axe X des éléments de poutres est usuellement dirigé du point « origine » au point « extrémité », les axes Y et Z étant en théorie positionnés de manière quelconque par rapport à cet axe X. Or la position de ces axes Y et Z doit être homogène pour les éléments d’une même famille, d’une part pour faciliter l’application des charges transversales (par exemple une charge de vent) et d’autre part pour la lecture des contraintes en fibres extrêmes qui sont définies par translation selon Y et Z de la fibre neutre.
Dans la plupart des logiciels, les axes locaux des éléments sont orientés par défaut soit par rapport au repère global du modèle (alignement du Z local avec le Z global), soit par rapport à l’ordre de création des entités. On peut toujours forcer une orientation homogène sur un ensemble d'éléments.
Pour les éléments 2D, de la même manière :
-
la normale sortante doit être connue lors de la définition des cas de charge (pression des terres, fluides ou champs de température) ;
-
il peut être judicieux de suivre une logique de détermination de la normale sortante, à la fois pour l’entrée en donnée des enrobages dans le cas d’un calcul de ferraillage, mais aussi pour orienter au préalable l’élément en fonction de la direction supposée du ferraillage à mettre en place (ou à vérifier). On essaiera de suivre la même logique pour tout le modèle (par exemple normale ascendante pour tous les planchers) pour ne pas induire d’erreurs dans l’exploitation des résultats ;
-
une orientation uniforme permet en outre d’éviter des discontinuités dans l’affichage des contraintes pour une fibre donnée de deux tôles adjacentes par exemple.
Exemple: Plaque et repères locaux des éléments
Sujet : le sens de définition des plaques peut, pour certains logiciels, générer l’orientation des repères locaux des éléments.
Exemple : Plaque 6×6 m² (modélisée avec 2 plaques de 3×6 m²), appuyée sur 4 côtés, charge de 3 T/m²
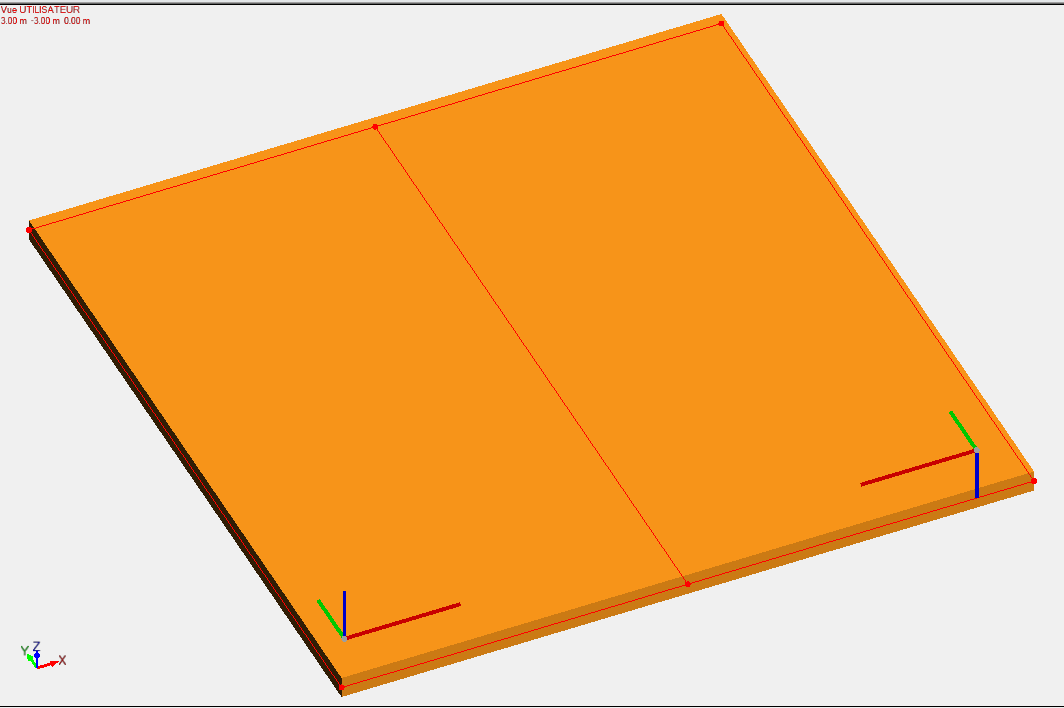
Vue des repères locaux des éléments
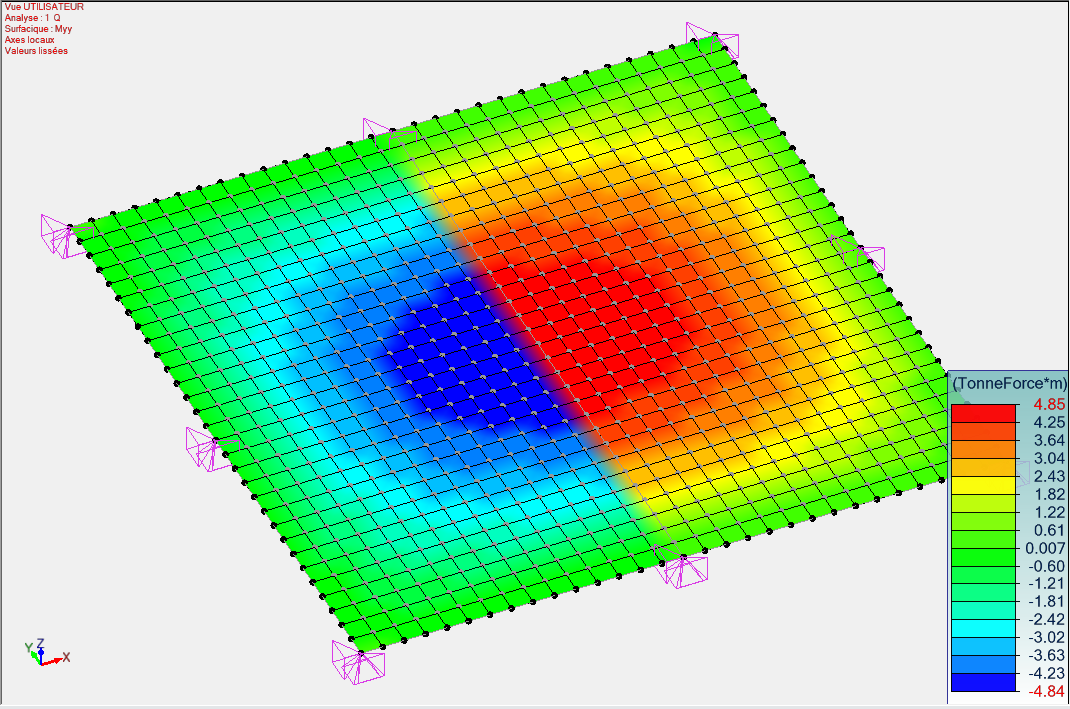
Vue des moments de flexion
On note alors une brusque discontinuité des moments sur la ligne de liaison entre les deux plaques. Cette discontinuité, qui n’a aucune origine réelle, est uniquement due à la modification d’orientation des repères locaux.
En particulier, le changement d'orientation de repères comme ci-dessus, posera problème si l'on demande au logiciel de calculer des efforts moyens dans une coupure donnée…
Vérifier que tous les repères locaux ont la même orientation.
C.3.6 Taille de modèle
Le temps de calcul est souvent déterminant dans l’économie du projet. Il est donc toujours intéressant de chercher à optimiser ce temps de calcul.
Le temps de calcul d’un modèle dépend de nombreux paramètres :
-
le nombre de degrés de liberté (nombre de nœuds x ddl) ;
-
la performance de la machine ;
-
la performance du logiciel (algorithme, parallélisation …) ;
-
la quantité de données sauvegardées (calcul temporaire non linéaire) ;
-
le type de calcul (linéaire – non linéaire).
En fonction du logiciel, on peut souvent optimiser la quantité de données à sauvegarder et le nombre de degrés de liberté.
Sur un projet courant, un modèle va tourner au moins une vingtaine de fois. Tout gain sur le temps de calcul est très vite appréciable.
Il est inutile de sauvegarder systématiquement les fichiers de résultats, en particulier si le modèle tourne en moins de deux à trois minutes. Ces fichiers ne font qu'encombrer des clouds gros générateurs de CO2.
C.3.7 Option « Merge » ou « Fusionner »
La plupart des logiciels ont des fonctions permettant de fusionner les nœuds ou les points de construction géométriques qui sont très proches en fonction d’une tolérance définie par défaut ou par l’utilisateur. Cela permet d’éviter les discontinuités de maillage.
Cette opération présente certains risques, notamment en présence de joints de dilatation ou d’absence de soudure que le modèle pourrait ignorer.
En cas de présence de joints, l’utilisateur a le choix entre :
-
représenter le joint avec sa largeur (distance modélisée entre les 2 lignes définissant les 2 bords des joints). Celui-ci est alors visible facilement lors de la manipulation du modèle et risque moins d’être « mergé » par erreur ensuite, mais cela pourra conduire à des éléments de taille hétérogène (associés à la taille du joint) si les extrémités des lignes ne se rejoignent pas ;
-
placer les points et lignes à la même position dans le modèle mais en les modélisant de façon disjointe; il est alors délicat de vérifier que le joint est bien représenté (sauf à afficher les numéros de nœuds ultérieurement) et les opérations de « merge » de nœuds doivent être effectuées avec précaution ;
-
utiliser les fonctionnalités de relâchements linéaires offertes par certains logiciels.
L’opération de fusion peut aussi impacter les asservissements entre les nœuds. C’est pourquoi les asservissements et les liens mécaniques entre nœuds doivent être définis après le « merging ».
C.3.8 Groupe d’éléments (pour la visualisation et l'exploitation ultérieure)
La plupart des logiciels offrent la possibilité de définir des groupes des nœuds ou des groupes d’éléments.
Cette fonctionnalité est très pratique et facilite l’affectation des matériaux et des masses, l’application des charges ou le post-traitement des résultats par éléments de la même famille.
C.3.9 Points de lecture des résultats et maillage
Les points de lecture des résultats découlent des vérifications à faire sur la structure. Les besoins de l’étude peuvent nécessiter plusieurs points de calcul des contraintes sur une même section (par exemple pour les contraintes normales et tangentielles).
Il ne faut pas confondre le maillage de calcul (c’est-à-dire l’ensemble des nœuds) et les points de lecture des résultats (parfois différents des nœuds).
Ce n’est pas parce qu’il y a beaucoup de points de lecture que le maillage est suffisamment précis.
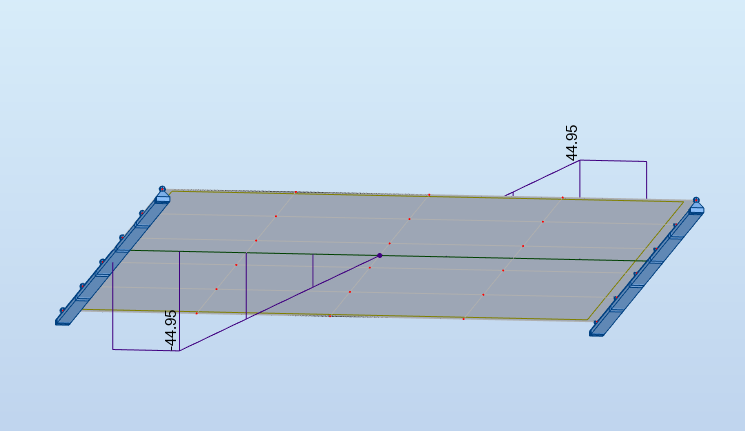
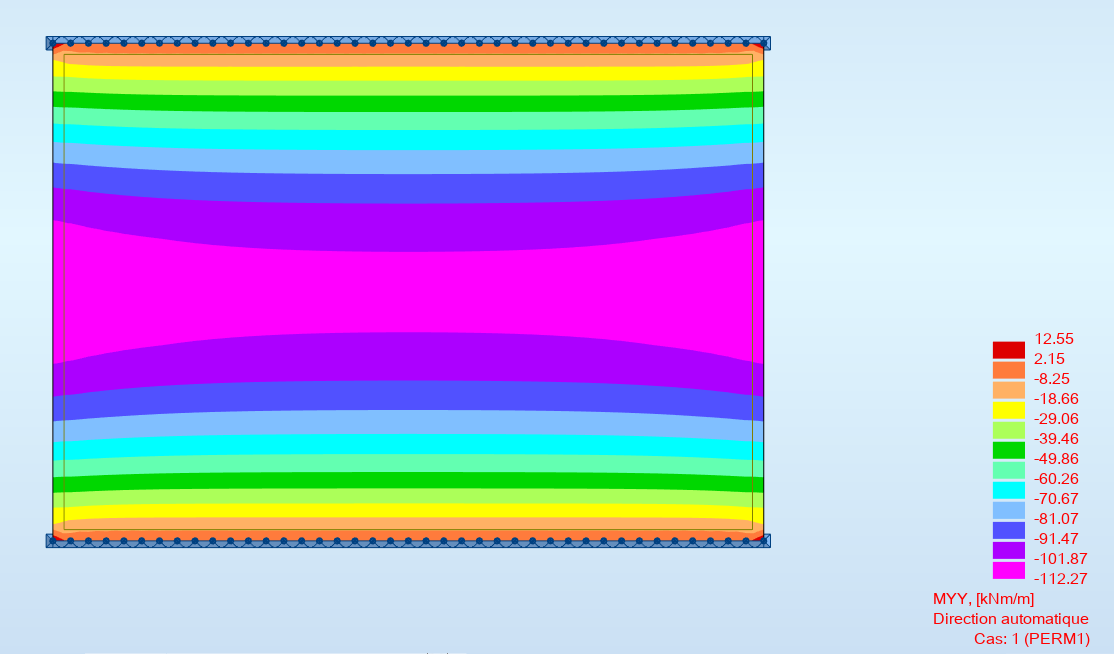
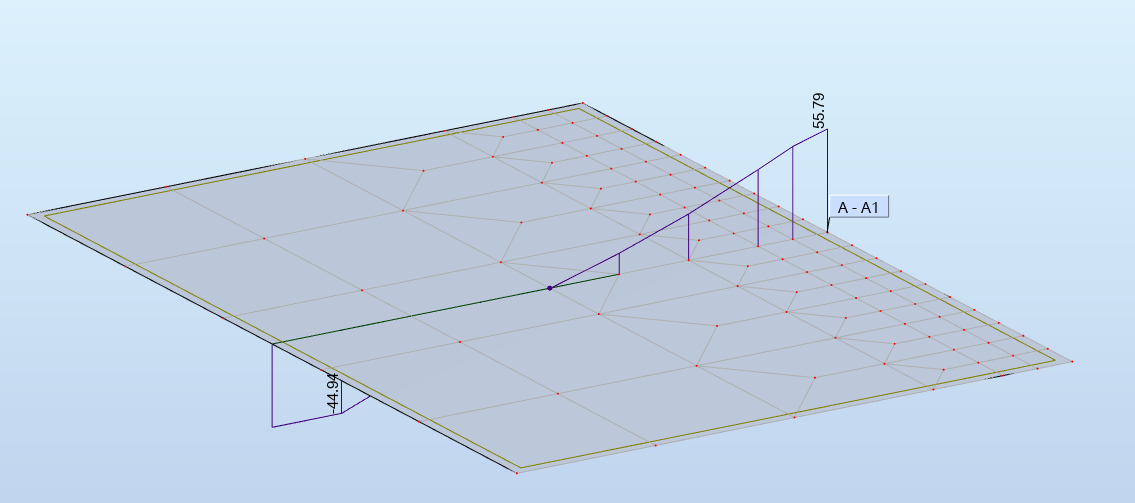
Dans l'exemple ci-dessous, les multiples isolignes de moments transversaux, en particulier à proximité des appuis pourraient faire croire à une grande précision de calcul, alors que le maillage est trop large pour obtenir des résultats fiables.
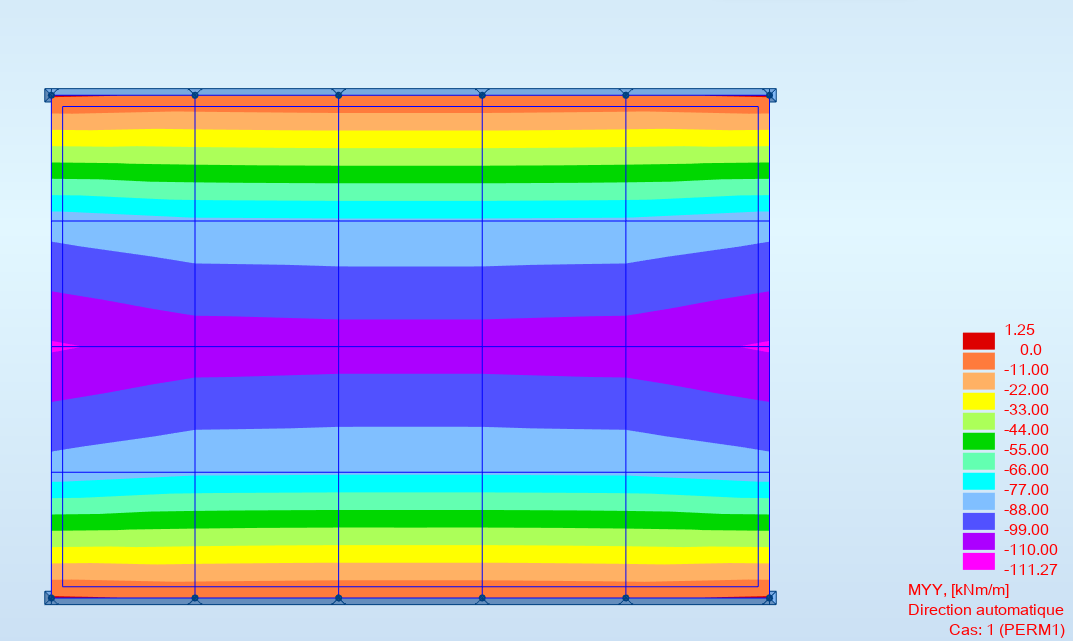
En effet, les points de lecture peuvent donner l’illusion d’un maillage raffiné alors que ce n’est pas le cas. Les résultats sur ces points de lecture étant interpolés des résultats aux nœuds.
En traçant les diagrammes de moment et de tranchant dans une coupe transversale, ceci apparaît clairement (la dalle est vue par le dessous):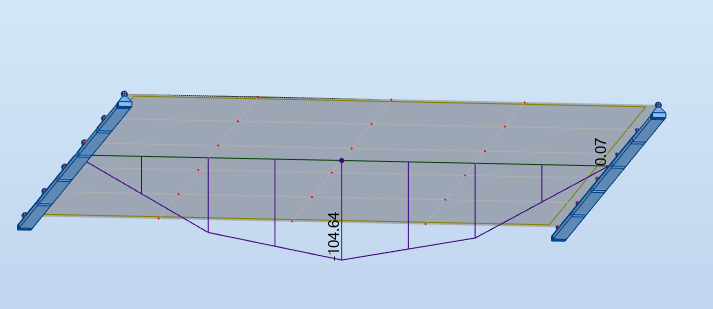
En raffinant le maillage, les graphes deviennent:
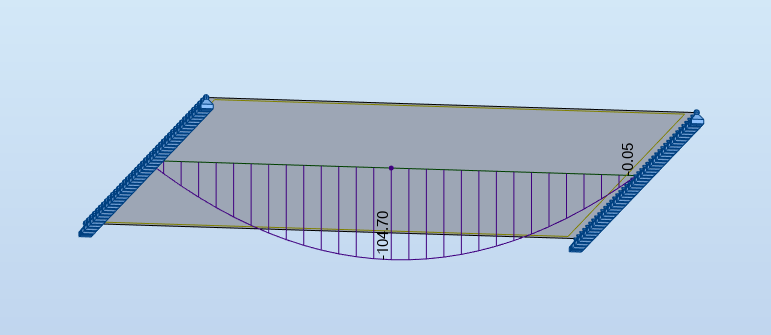
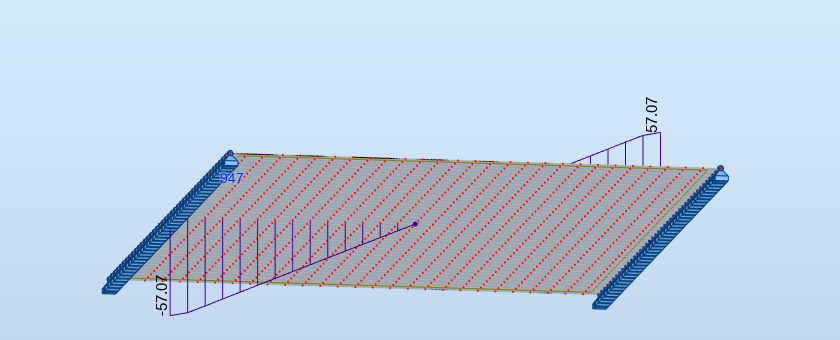
Dès lors qu'on a une singularité, ici la ligne d'appui, la taille du maillage intervient fortement dans la précision des résultats. Il suffit de raffiner le maillage pour s'en rendre compte:
Le calcul de l'intégrale des efforts montre un impact (sur cet exemple) fort sur le tranchant (écart de 22%) et très faible sur le moment, entre la zone de maillage grossier et la zone de maillage raffiné.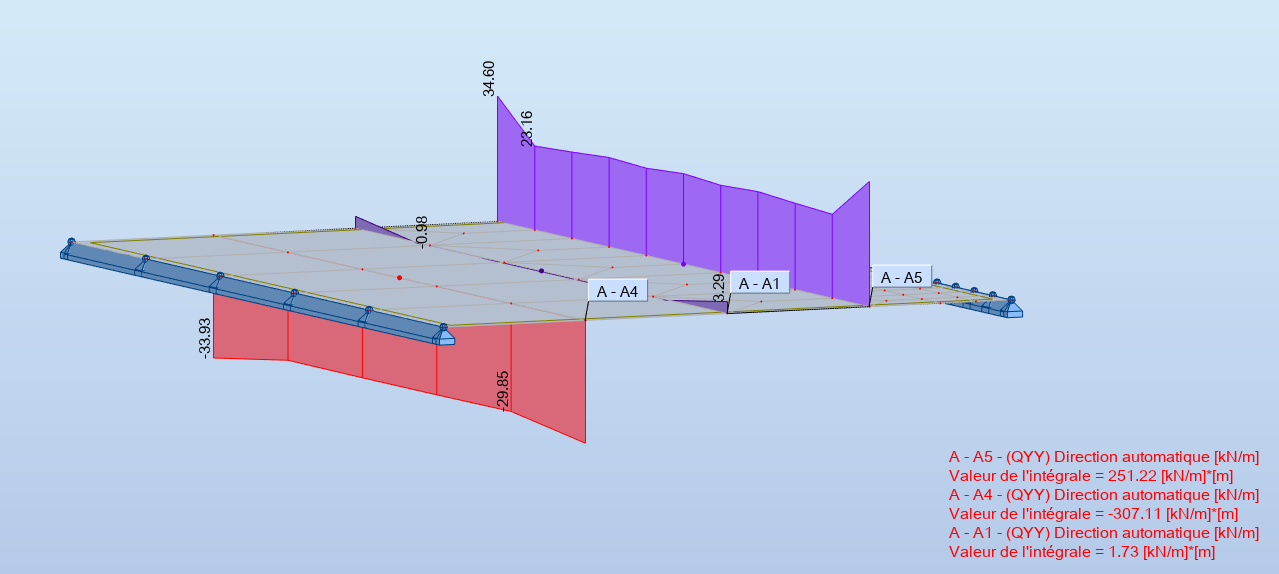
Intégrale de l'effort tranchant - plaque sur deux files d'appuis simples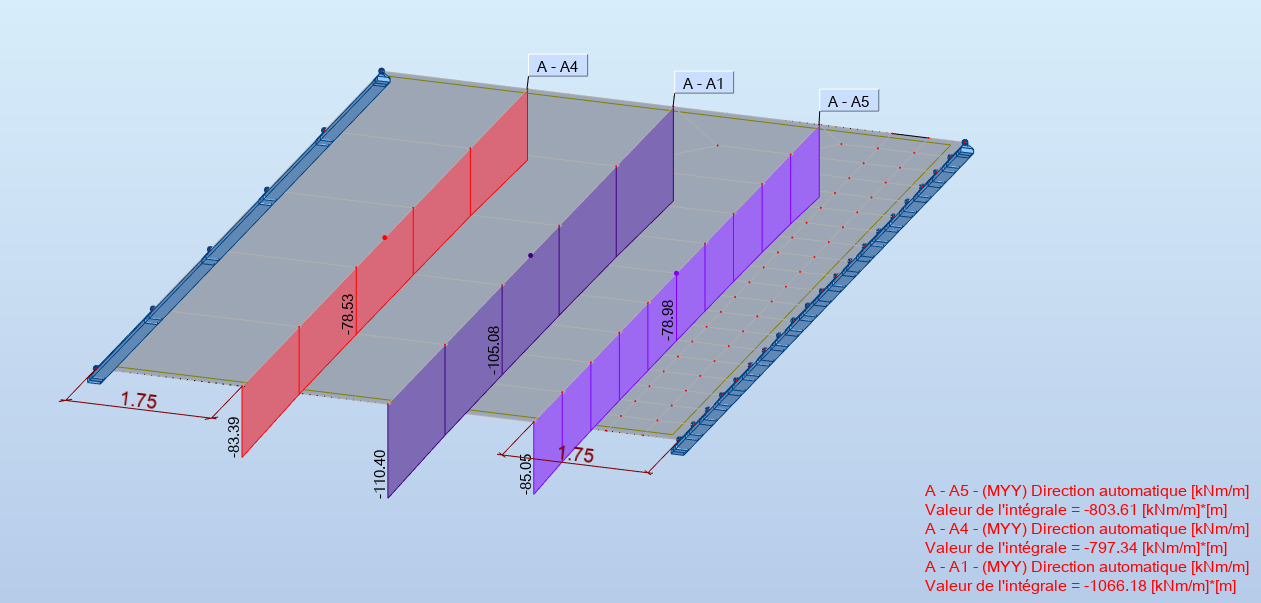
Intégrale du moment - plaque sur deux files d'appuis simples
Il suffit de créer une singularité pour le moment, en encastrant les rives, pour qu'un écart sur le moment se produise (de l'ordre de 17%)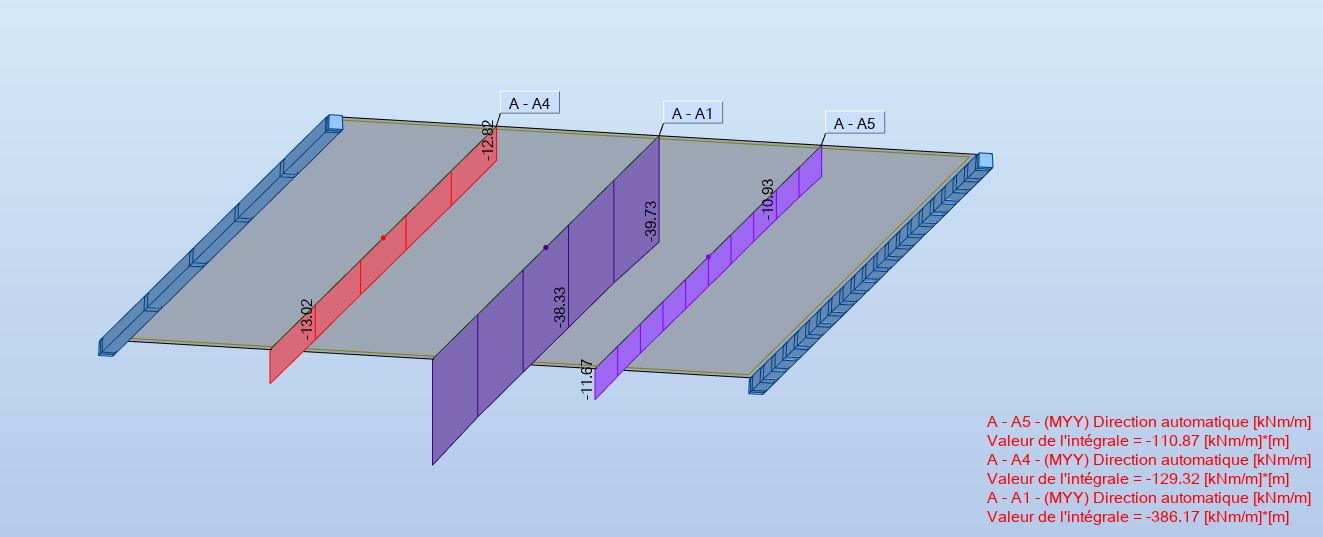
Intégrale du moment - plaque bi-encastrée
C.4 Modélisation des éléments non structuraux ou des équipements
C.4 Modélisation des éléments non structuraux ou des équipements
Les éléments non structuraux et les équipements sont des éléments qui n’assurent aucun fonctionnement structural dans le comportement de l’ouvrage. Trois cas sont à distinguer :
-
L’élément en question a une faible masse et une faible rigidité par rapport à la structure porteuse ; dans ce cas, il peut être négligé dans le cadre de la modélisation ;
-
L’élément en question a une faible masse mais sa raideur ne peut pas être considérée comme négligeable (par exemple certains panneaux de façade bridant les mouvements de la structure support). Dans ce cas, sa présence peut modifier le comportement de l’ouvrage et il est donc nécessaire de le modéliser (a minima par une rigidité fictive) ;
-
L’élément en question a une masse non négligeable mais sa raideur peut être considérée comme négligeable. Dans ce cas, une masse équivalente doit être intégrée dans le modèle.
| Équipement / Élément non structural | Masse négligeable | Masse non négligeable |
| Raideur faible | Non pris en compte | Masse à intégrer |
| Raideur non négligeable | Raideur à modéliser | Masse et raideur à modéliser |
Dans le cadre des analyses sismiques, il est important de s’assurer que l’élément ne rentrera pas en résonance avec la structure porteuse. On peut se référer aux publications suivantes pour identifier les cas pour lesquels il sera nécessaire de modéliser l’interaction élément / structure.
-
J. Betbeder-Matibet – Génie parasismique – volume 3 – Hermes Science Publications (2003).
-
FD P06-029 - Règles de construction parasismiques - Dimensionnement des ancrages en zone sismique (décembre 2017)
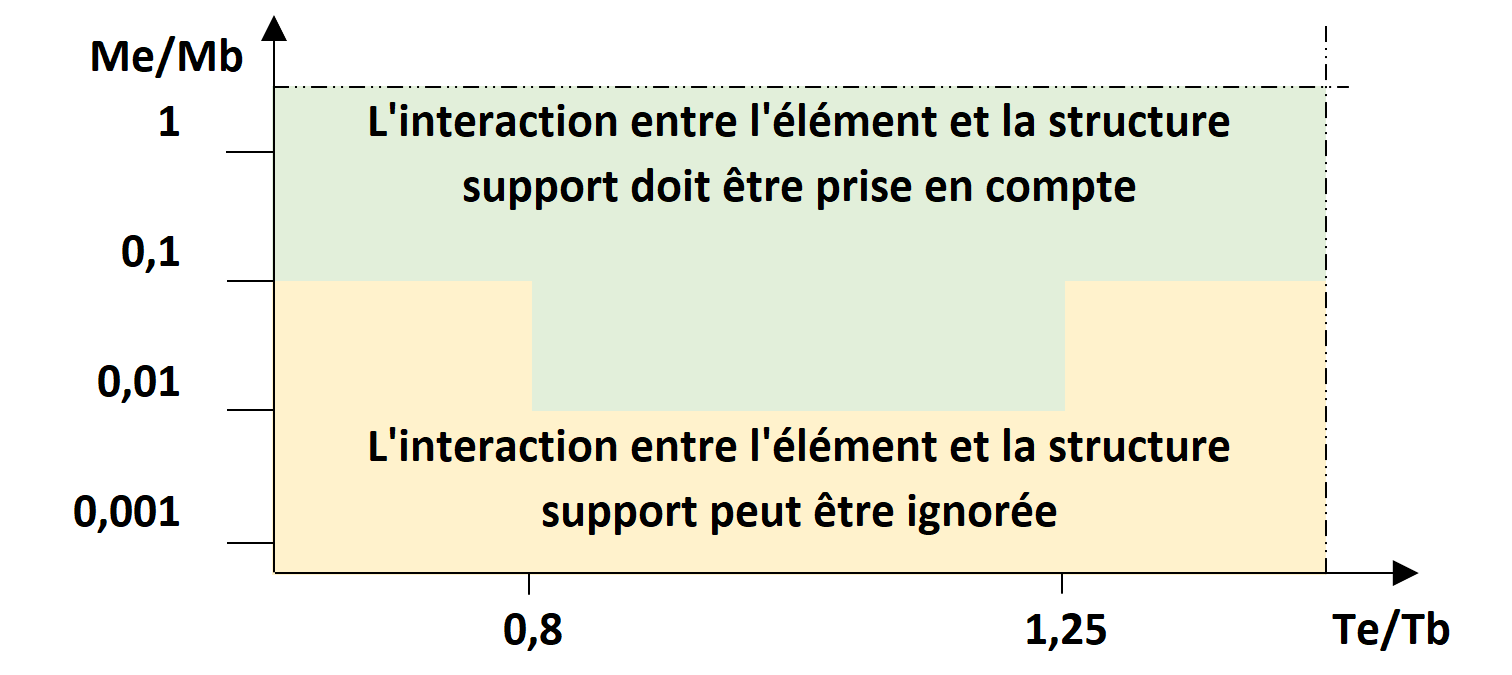
Proposition de l'AFPS sur la nécessité ou non de prise en compte de l'interaction dynamique entre élément non structural/équipement et la structure (Recommandations AFPS90, 1993).
Légende :
-
Me=masse des équipements ou éléments non structuraux
-
Mb=Masse de la structure support
-
Te= Période de l’élément non structurel
-
Tb=Période de la structure support
Nota : suivant la direction étudiée, la masse de la structure support peut se limiter au seul plancher support (pour plus de détails, se reporter aux références citées ci-avant).
Dans le calcul sismique des bâtiments, les éléments non structuraux (de type cloisons, par exemple) doivent être pris en compte dans la modélisation de la structure lorsqu’ils sont susceptibles de modifier sa raideur transversale. Ces éléments peuvent faire l’objet de justifications inspirées de celles de l’article 4.3.6 de l’EC8-1 applicable aux ossatures avec remplissage en maçonnerie.
On peut aussi être amené à supprimer des petits éléments dans un modèle destiné à une analyse modale.
$translationBooksC.5 Conditions aux limites
C.5 Conditions aux limites
C.5.1 Cas général
Les conditions aux limites sont déterminées par les degrés de liberté bloqués ou non des nœuds situés aux frontières de la structure (supports de la structure, coupures …).
Les notions de repères et de conditions aux limites sont étroitement liées ici. L’orientation d’une condition aux limites (forces, moments, déplacements imposés, accélération…) va dépendre de celle du repère actif au moment de sa mise en place et/ou de celle de l’entité (nœud, élément) sur laquelle elle vient s’appliquer.
Pour les repères, il a lieu de distinguer les repères liés aux éléments et les repères liés aux nœuds.
Généralement, par défaut, les repères liés aux nœuds sont identiques au repère global. On peut cependant attribuer à un ou plusieurs nœuds un repère d’orientation différent afin de pouvoir appliquer en ce(s) nœud(s) une condition aux limites suivant une orientation particulière. De simples contrôles graphiques de l’orientation de charges nodales (forces, moments, déplacements imposés) permettent de visualiser la bonne définition de ces repères nodaux.
Pour les éléments, les repères locaux sont liés généralement aux orientations principales définies lors de la création de l’élément. De simples contrôles graphiques de l’orientation des charges appliquées sur les éléments (pression par exemple) permettent de visualiser la bonne définition de ces repères éléments.
Les conditions aux limites doivent assurer la stabilité de la structure vis-à-vis des chargements qui lui sont appliqués et être représentatives de son fonctionnement global. Cette stabilité doit être effective systématiquement dans les 6 composantes globales X, Y, Z, RX, RY et RZ, même si les chargements ne concernent que quelques directions.
La stabilité suivant une translation s’effectue toujours par le blocage d’au moins un nœud suivant la direction de cette translation.
La stabilité autour d’un axe s’effectue soit par le blocage en rotation d’un nœud (suivant l’axe de rotation) soit par le blocage en translation de deux nœuds disposés dans un plan perpendiculaire à la rotation.
Il est important de vérifier que les réactions dans les directions bloquées uniquement pour des questions de stabilité numérique sont nulles.
Illustration :
Objectif : descente de charge d’une dalle appuyée sur 4 poteaux ;
-
La dalle est modélisée en éléments volumiques (éléments avec nœuds à 3 degrés de liberté UX, UY et UZ);
-
Conditions aux limites : blocage des nœuds aux appuis suivant la direction verticale UZ = 0.0 ;
-
Problème : certains logiciels n’effectueront pas le calcul pour des raisons d’instabilité ;
-
Conditions aux limites supplémentaires : 2 nœuds bloqués suivant la direction transversale OY + 1 nœud bloqué suivant la direction transversale OX.
Bilan :
-
4 nœuds bloqués suivant OZ - blocage vertical aux 4 appuis ce qui occasionne également la stabilisation en rotation/OX et en rotation/OY de la dalle ;
-
2 nœuds bloqués suivant OY - stabilité en translation/OY et en rotation/OZ de la dalle ;
-
1 nœud bloqué suivant OX - stabilité en translation/OX de la dalle.
On vérifiera qu’aux nœuds bloqués suivant UX et UY, les réactions RX et RY sont nulles.
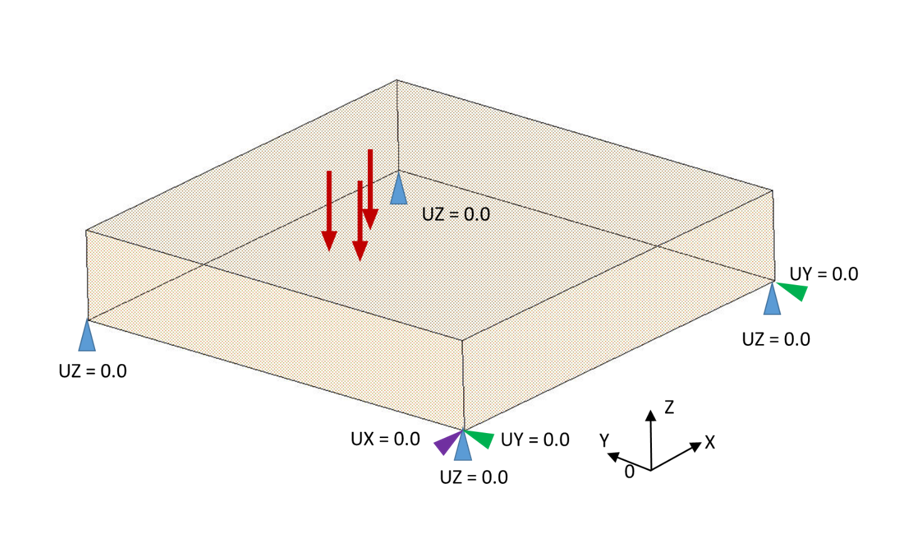
Exemple pour la stabilité minimale d’une dalle chargée en Z
Piège : la dalle n’est chargée qu’en Z, mais pour assurer la stabilité du calcul, il faut empêcher ses déplacements en translation en X et Y et en rotation autour de Z. Dans le cas présent, cela a été effectué en bloquant 2 points en Y et 1 point en X. (NB : la stabilité en Z nécessite un minimum de 3 points non alignés bloqués en Z).
Dans un modèle en 3 dimensions, un encastrement signifie que les 3 rotations et les 3 translations sont bloquées.
Dans la pratique, le logiciel peut procéder de deux façons pour le blocage des déplacements, sans laisser le choix à l’utilisateur :
-
Une méthode toujours stable numériquement, qui consiste à supprimer le ddl dans la résolution du problème, sa valeur étant nulle (voir Partie 2 – A.1 – on raisonne dans ce cas sur une matrice 5×5).
-
Une seconde méthode consistant à placer numériquement un ressort de très grande raideur dans la direction bloquée pour que le déplacement soit numériquement presque nul. (voir Partie 2 – A.1 – on raisonne dans ce cas sur une matrice 9×9 en rajoutant des termes de valeur relative très différente).
Il est important de comprendre comment le logiciel procède pour pouvoir détecter d’éventuelles instabilités numériques qui peuvent conduire à un arrêt des calculs ou des résultats non équilibrés.
C.5.2 Modélisation de différents types d’appuis
Les appuis peuvent souvent être considérés comme fixes sauf lorsque le sol intervient dans le comportement de la structure c’est-à-dire lorsqu’il existe une interaction, statique ou dynamique, entre le sol et la structure (ISS) : par exemple un sol mou générant des tassements différentiels d’appuis ou pour cerner le comportement sismique.
Les structures sont fondées sur trois types de fondations : superficielles (semelles isolées ou filantes), radiers ou fondations profondes (pieux, puits, barrettes, inclusions rigides, …).
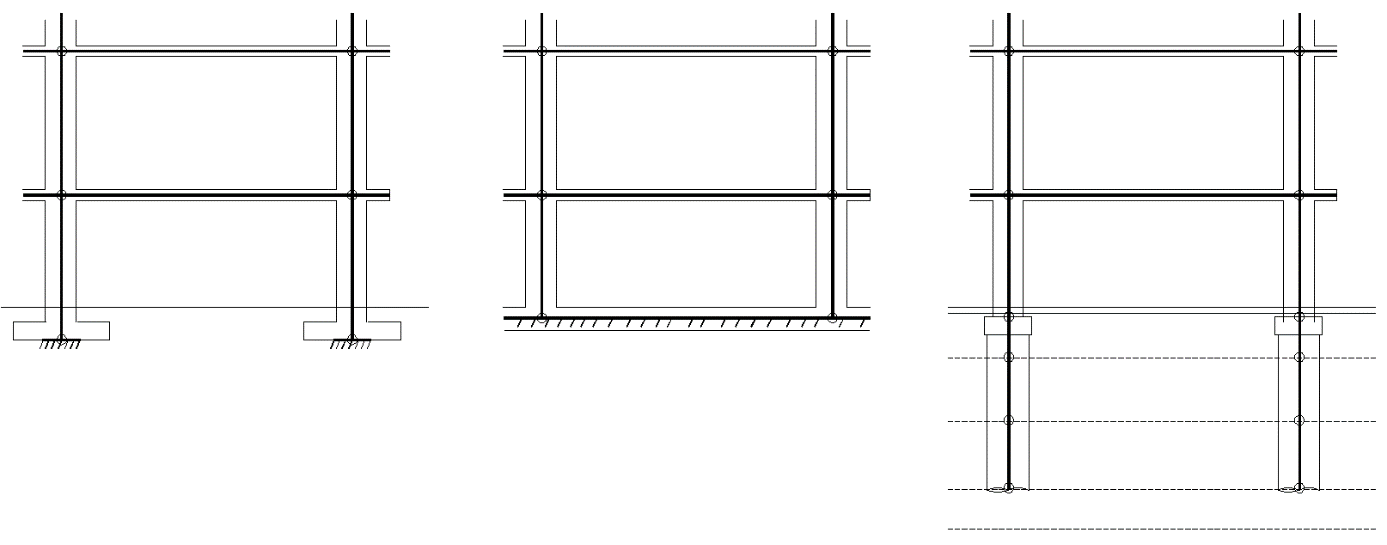
Illustration des fondations superficielles, fondations sur radier et fondations profondes.
C.5.2.1 Fondations superficielles – cas des appuis sous poteaux
Les semelles superficielles sont modélisées par des appuis ponctuels selon 3 possibilités :
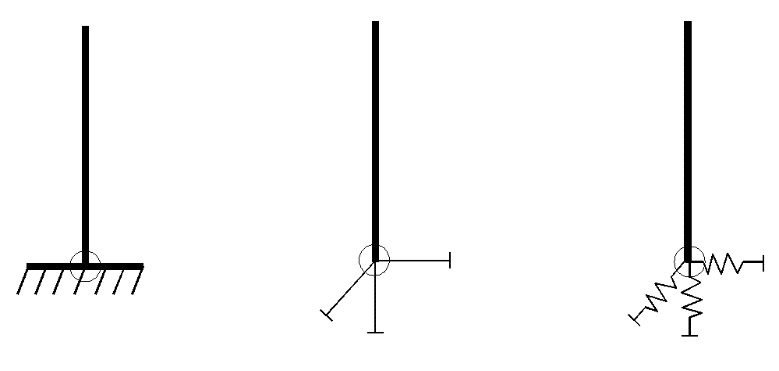
Illustration: appui encastré, appui articulé et appui élastique
Appui encastré : les 6 degrés de liberté sont bloqués.
Appui articulé : les déplacements sont bloqués et les rotations sont libres.
Appui élastique : l’appui est défini par 6 ressorts élastiques (un par degré de liberté) ou une matrice de raideur ou d’impédance.
Raideurs des appuis élastiques
Pour calibrer la raideur des appuis élastiques, il faut disposer de la raideur à l’interface entre la semelle et le sol. Cette raideur à l’interface (notée usuellement kv) est issue du rapport géotechnique.
Le terme Kz (raideur statique du ressort vis-à-vis d’un effort vertical) s’obtient par la formule Kz = kv x S où S est la surface de la semelle.
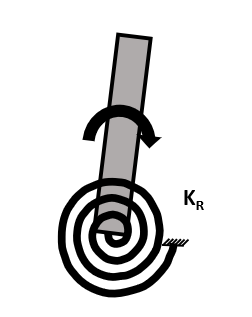
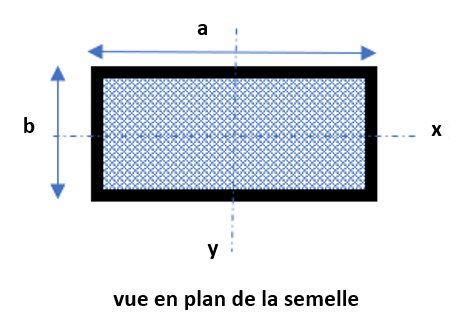
Les termes KR s’obtiennent par la formule KRi (en N.m/rad) = Ii x kv où Ii est l’inertie (en plan) autour de l’axe i de rotation de la semelle concernée.
Pour un rectangle, on va retrouver les termes Iy=b.a3/12 et Ix=a.b3/12, a et b étant les dimensions en plan.
On sera vigilant à la notion de raideurs à long terme, à court terme et sismique fournies par le géotechnicien, qui diffèrent notablement.
C.5.2.2 Fondations superficielles – cas des appuis sous voiles
Les voiles sont généralement modélisés par des éléments de plaques ou coques. Deux modes de modélisation sont possibles pour l’appui.
Méthode 1 : En définissant des appuis linéiques répartis sous le voile. Ce cas se rapproche soit de celui des poteaux (voir ci-avant) en répartissant les raideurs ponctuelles linéairement sur le voile, soit de celui des radiers (voir §5.2.3 ci-après), mais en considérant une seule direction de calcul.
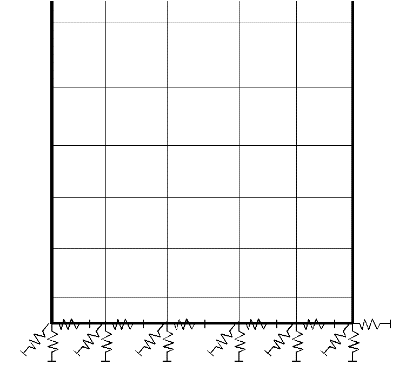
Méthode 2 : En modélisant un appui central unique pour récupérer un torseur global en pied de voile pour le dimensionnement des fondations. Une barre rigide à la base du voile est alors nécessaire pour répartir les efforts dans le voile. Les conditions d’appuis sont identiques à celles des poteaux (encastrés ou élastiques ou avec raideurs).
Dans les deux cas, il convient de vérifier les unités pour la raideur introduite, en cohérence avec les unités physiques fournies par le géotechnicien : s’agit-il de N/m, N/m2, N/m3 ? De même de N.m/rad ou N.m/deg ? (ou unités dérivées : kN, MN…)
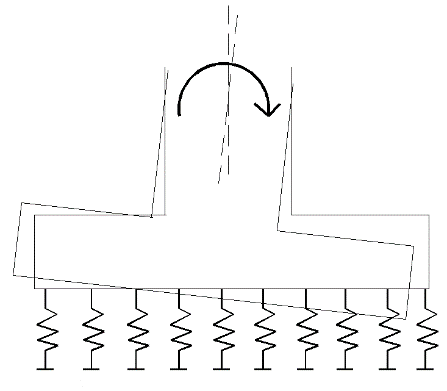
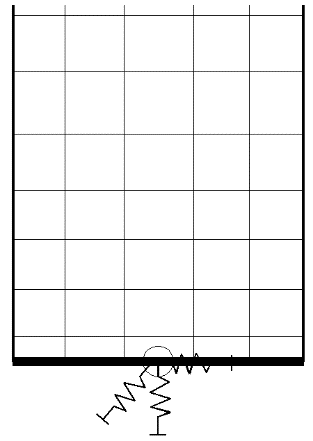
C.5.2.3 Fondations sur radier
L’appui du radier sur le sol est modélisé par la mise en place de ressorts sous les différents nœuds du radier. Les raideurs des ressorts sont alors calculées selon le même principe que pour les semelles isolées. Elles peuvent être différenciées en fonction des zones de chargement. Attention à ce que la raideur soit bien proportionnelle à la surface afférente au nœud (difficulté possible en cas de maillage irrégulier, si cette affectation n'est pas automatisée dans le logiciel).
Certains logiciels proposent aussi des ressorts « surfaciques » sur plaque. Dans tous ces cas, vérifier sur un cas unitaire la bonne concordance entre effort et déplacement.
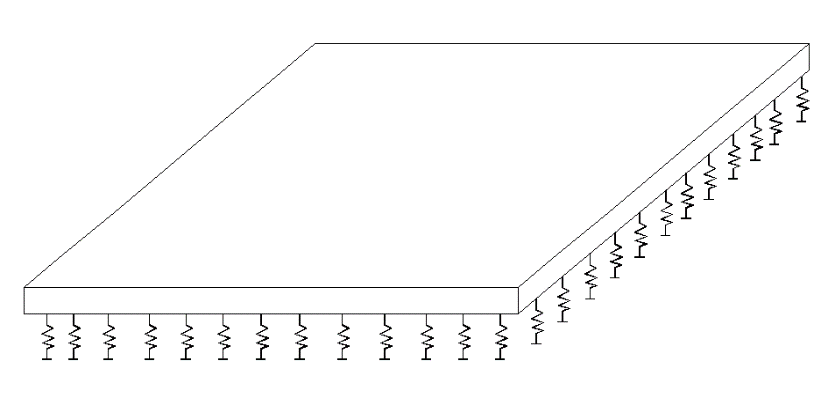
Modélisation du sol par un système de ressorts
Dans la réalité, la stabilité horizontale du radier est assurée par le frottement sous le radier et une éventuelle butée latérale. Dans la modélisation, on choisira soit des ressorts horizontaux surfaciques sous le radier, soit des ressorts sur le pourtour (ponctuels ou répartis), en fonction des vérifications internes à mener.
Attention: pour les modélisations avec ressorts surfaciques horizontaux, la raideur horizontale est en fait liée au frottement radier/sol avec des glissements éventuels. Dans le cas d’une étude de retrait, une surestimation sur cette raideur horizontale vient brider artificiellement le radier et peut générer des contraintes de traction importantes et non réalistes.
C.5.2.4 Fondations sur pieux
Les fondations sur pieux peuvent être modélisées selon 3 méthodes.
Méthode 1 : chaque pieu est modélisé au moyen d’une poutre sur sol élastique (ou appuis linéiques élastiques). les raideurs horizontales du sol dépendant des caractéristiques des couches de sol (Kx et Ky) sont généralement déterminées par le géotechnicien (attention au maillage et à la concordance des unités). Un appui vertical est positionné à la base du pieu pour représenter la raideur en pointe.
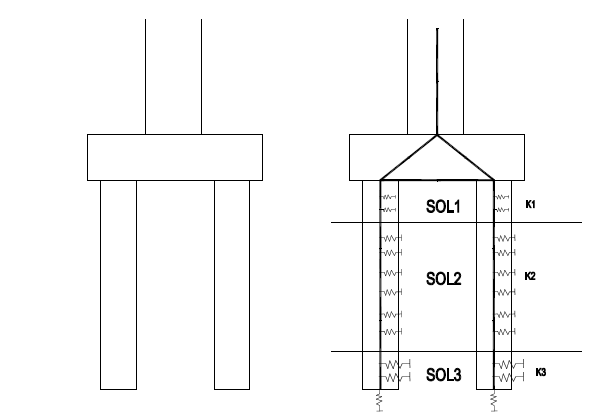
Méthode 2 (intermédiaire mais peu usitée) : chaque pieu est modélisé par un appui (ou matrice) élastique caractérisé par 6 raideurs qui sont généralement calculées par le géotechnicien.
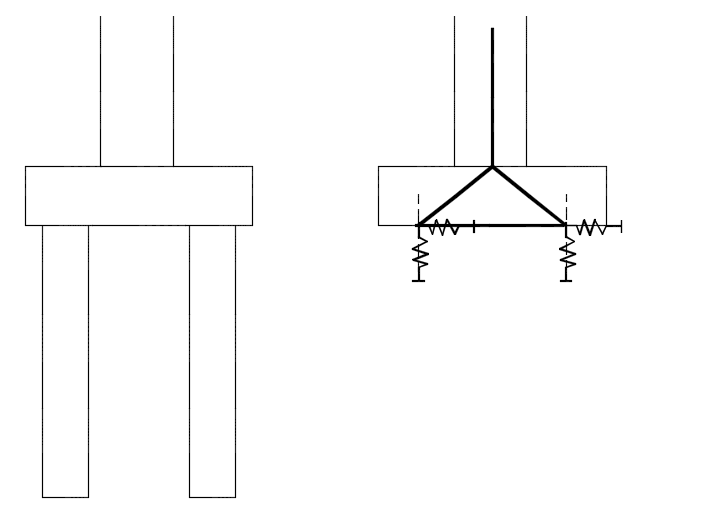
Méthode 3 : Il est possible de remplacer une fondation complexe par sa matrice de raideur ou de souplesse, qui intègre la configuration globale de la semelle avec l’ensemble des pieux.
La fondation sera modélisée dans le modèle général par un appui élastique au nœud A, dont les 6 raideurs auront été calculées au préalable à partir d’un modèle local des fondations. Voir l'exemple de calcul ci-dessous.
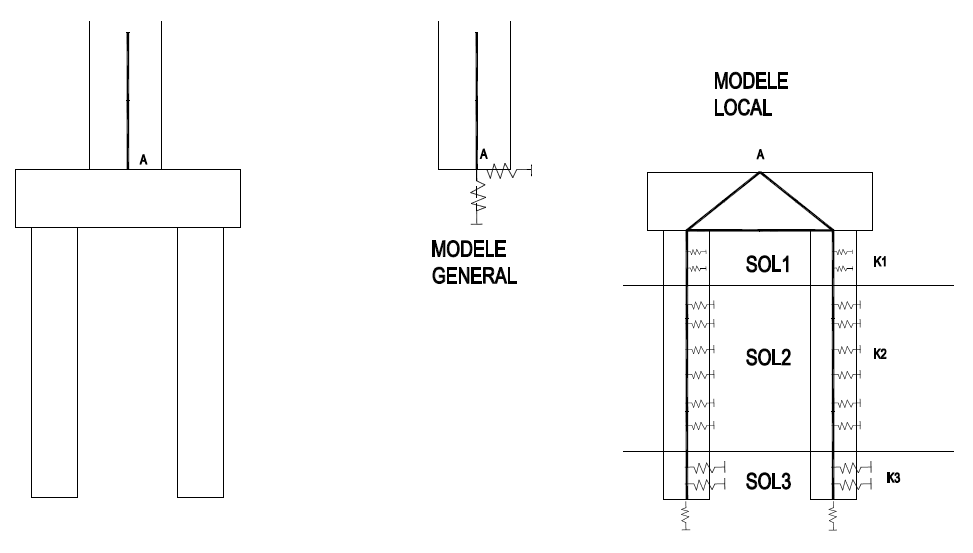
Du fait du couplage entre les déplacements horizontaux et les rotations dans les systèmes de fondations profondes, rien ne permet a priori de négliger les termes croisés (non diagonaux) de la matrice de raideur. Or très peu de logiciels permettent la prise en compte de la totalité de la matrice ; ce qui est un problème. Il convient de démontrer au cas par cas que la « diagonalisation » de la matrice n’a pas d’impact notable sur les efforts et déplacements de la structure.
Les méthodes 2 et 3 permettent de limiter la taille du modèle, surtout dans le cas de nombreux pieux. En revanche la première méthode donne directement les efforts dans les pieux.
Plus généralement, dans les modèles globaux, on modélise les pieux ou groupes de pieux par des ressorts (méthode 3). Ce n’est que pour le dimensionnement des pieux eux-mêmes qu’on peut être amenés à les modéliser par des poutres verticales avec ressorts (méthode 1). On peut également utiliser des logiciels spécifiques.
Dans tous les cas, il ne faut pas oublier d’intégrer dans les coefficients Kx ou Ky l’ensemble des exigences réglementaires comme l’effet de groupe.
Enfin, dans le cas où les pieux sont calculés par une autre entité que celle en charge du modèle de la superstructure, des itérations peuvent être nécessaires pour arriver à une convergence des efforts.
Exemple de calcul d'une matrice de raideur.
Données : pieux de diamètre 1.20 m, Ebéton= 30000 MPa, Ksol= 6495 (kN/m)/m, hauteur de semelle 2.00 m.
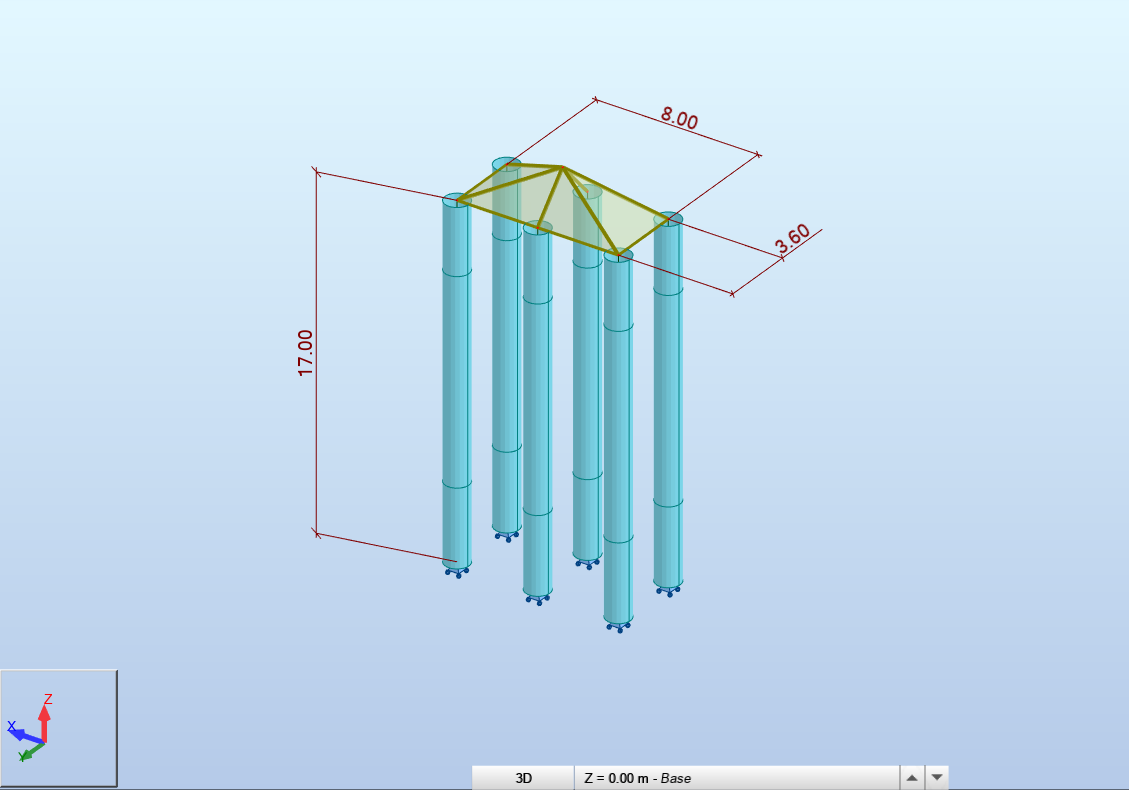
Géométrie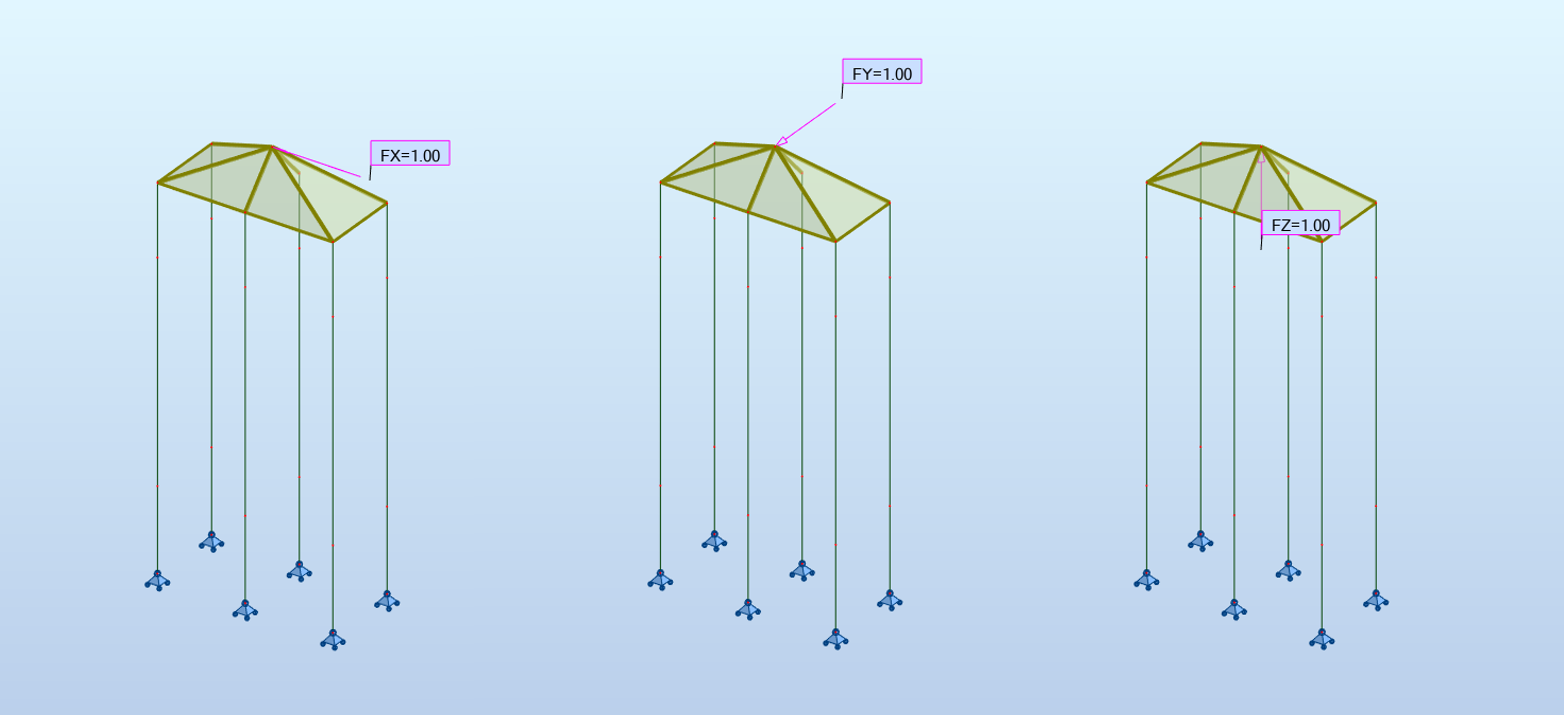
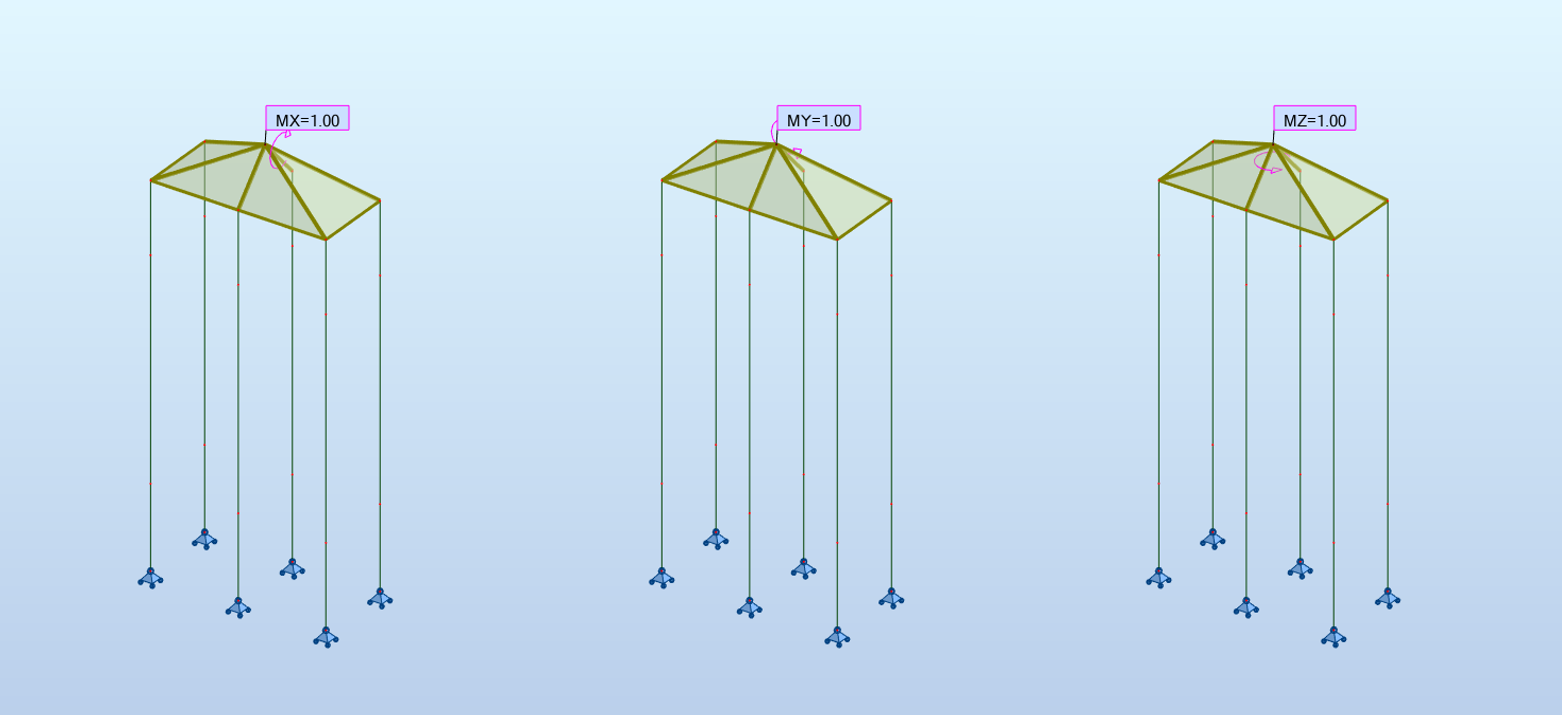
Efforts unitaires (1 kN ou 1 kN.m) introduits
Résultats: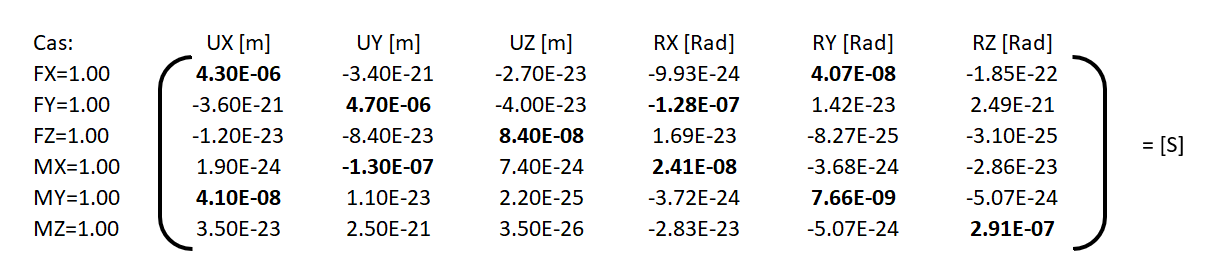
Déplacements sous ces efforts = la matrice de souplesse [S]
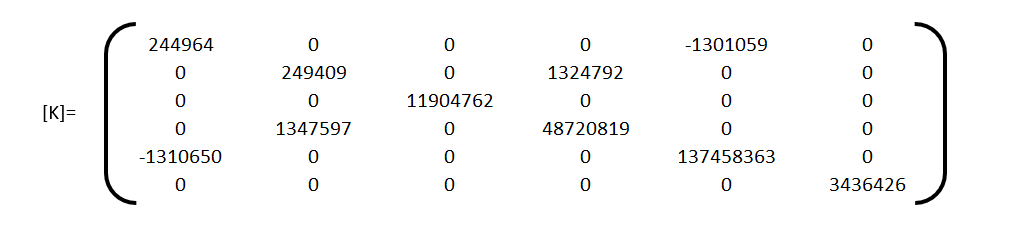
Matrice de raideur [K]=[S]-1 - (unités : KN, KN.m, m et rad)
(Les matrices s'inversent très simplement à l'aide d'un tableur).
Incidence de la non prise en compte des termes croisés : on ajoute une pile de hauteur 10 m et de section 5.00×1.00 m², E=32000 MPa au modèle précédent. La même pile est modélisée avec un encastrement élastique à 6 composantes qui sont les termes de la diagonale de la matrice ci-dessus. On applique un effort de 1000 kN longitudinal (respectivement transversal) en tête: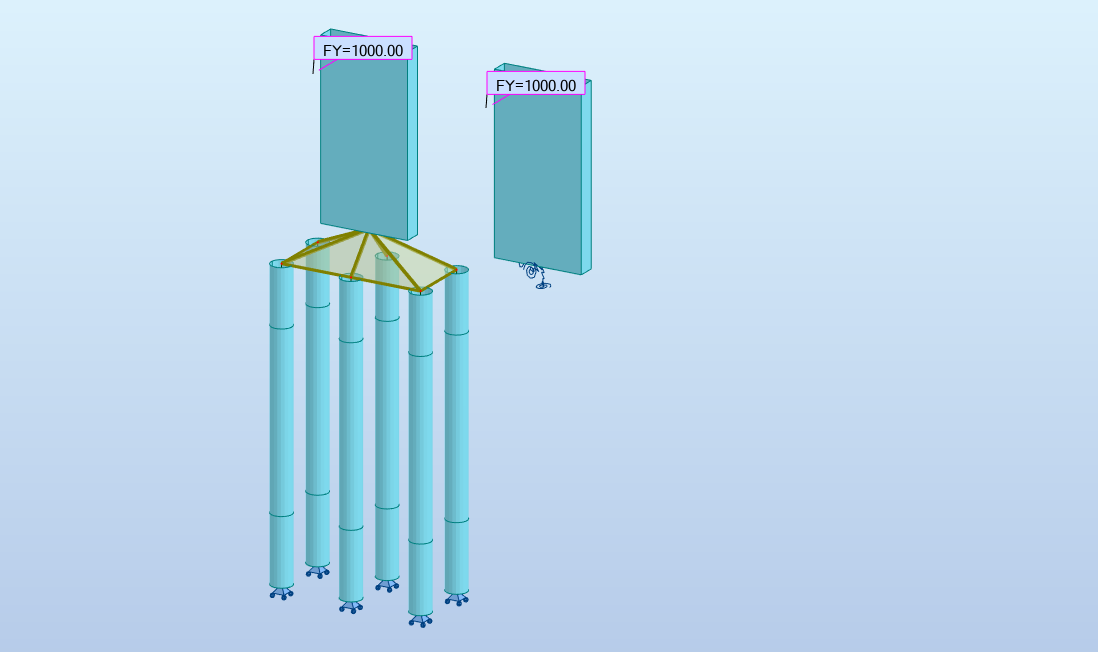
Dans ce cas de figure, on obtient un écart de l'ordre de 13% sur le déplacement longitudinal (respectivement 17% sur le déplacement transversal) - la souplesse de la pile intervient mais elle est identique dans les deux cas. Il appartient à l'ingénieur de juger de l'incidence de cette simplification éventuelle.
Une des sujets qui doit être traité dans la note d'hypothèse générales est relative aux simplifications que l'on va accepter ou non pour le calcul d'ISS. Elle sont liées à la prise en compte, d'une part, des modules à court et long terme du sol (ratio de 2 sur K) et du béton constitutif de la structure (ratio de 3 sur E) et, d'autre part, aux lois de comportements introduites pour le sol (linéaires, à plusieurs pentes, avec un palier de plastification possible). Suivant le logiciel utilisé, vouloir intégrer tous ces facteurs peut s'avérer très complexe, conduire à monter plusieurs modèles différenciés et à effectuer certaines vérifications manuellement (remplacement de ressorts plastifiés par un effort équivalent, par exemple). Effectuer un calcul en fourchette peut s'avérer intéressant dans certains cas, en distinguant les vérifications de résistance de celles de déformations.
Illustration de la complexité de la loi de comportement des ressorts de sol
C.5.3 Modélisation des appareils d’appui

Les appareils d’appui d’une structure peuvent être modélisés de deux manières :
-
soit sous forme d’un appui, avec les degrés de liberté et paramètres de souplesse de l’appareil. Dans ce cas on récupère des réactions d’appui ;
-
soit sous forme d’un élément barre avec plusieurs possibilités de modélisation (décrites ci-après).
Dans tous les cas, les appareils d’appui doivent être placés à la position réelle (excentrement transversal et vertical) sous peine de grosses erreurs.
Il est à noter que le comportement des appareils d’appui peut être une source de non-linéarité (appareils d'appui glissants, par exemple) et nécessiter de facto un calcul non-linéaire.
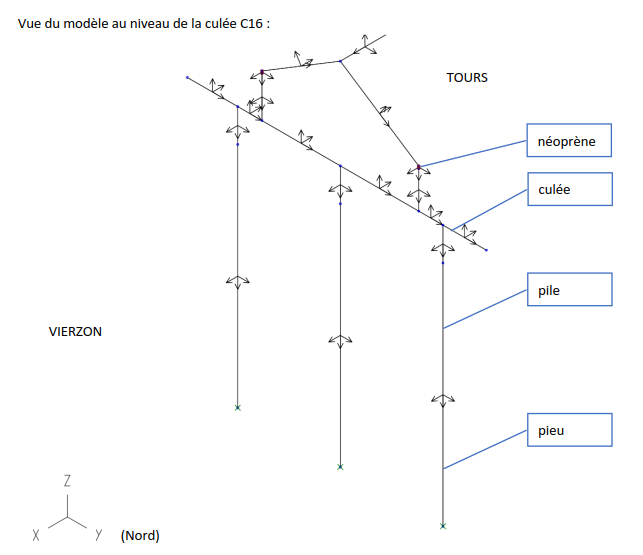
Exemple d’une modélisation d’une pile de pont incluant les appareils d'appui en élastomère fretté.
Si on recourt à des éléments barres, il y a plusieurs choix possibles :
-
certains logiciels proposent des éléments de type pièces de liaison qui reproduisent les caractéristiques des appareils d’appui (il ne s'agit donc pas à proprement parler d'une barre) ;
-
on peut également utiliser des éléments “ressorts” entre deux barres, si le logiciel le permet ;
-
on peut définir une « poutre de cisaillement », c’est-à-dire une barre très rigide en flexion mais ayant une déformabilité calibrée à l’effort tranchant. Il faut forcément que le logiciel prenne en compte la déformation d’effort tranchant (option non activée par défaut dans certains logiciels). On définira alors, pour cette barre, une section non pesante, une inertie et une section droite fortes, et bien sûr une section réduite à l’effort tranchant permettant de retrouver une équivalence de l’appareil d'appui (pour la barre GS/h ⇔ G'S'/T pour l'appareil d'appui ) ;
-
on peut enfin utiliser une barre classique, fonctionnant en flexion, encastrée en pied et libre en tête. On définira alors, pour cette barre, une section non pesante, une section réduite à l’effort tranchant forte et une inertie calibrée pour avoir une déformation globale équivalente à celle de l’appareil (pour la barre 3EI/h3 ⇔ G'S'/T pour l'appareil d'appui ).
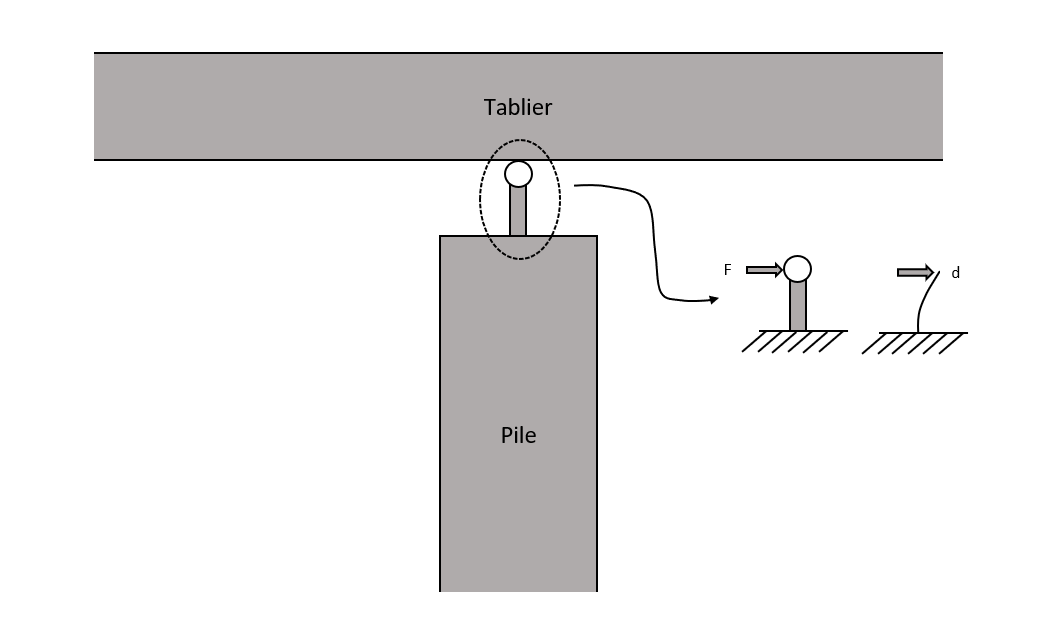
Quelle que soit la méthode, il faut que l’élément ait un comportement global équivalent aux caractéristiques des appareils d’appui, telles que définies par les normes des appareils d'appuis (série NF EN 1337) et il ne doit pas introduire de moment ni dans le tablier, ni dans la pile (autre que celui lié à l'épaisseur de l'appareil). .
L'illustration ci-dessous montre des extension rigides permettant de modéliser une tête de pile supportant deux travées isostatiques, simplement reliées par une dallette.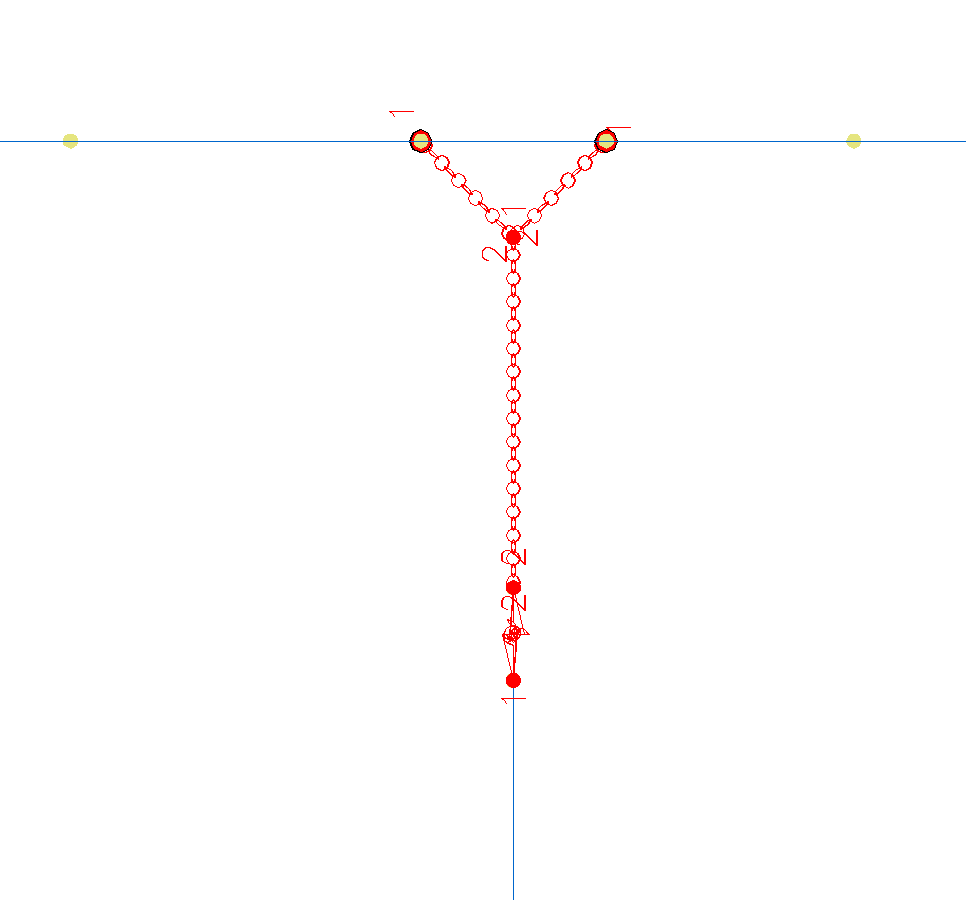
Détail de modélisation d’une pile supportant deux travées isostatiques
C.6 Connexions – liaisons – assemblage
C.6 Connexions – liaisons – assemblage
C.6.1 Relâchement des barres / ressorts / degrés de liberté
Dans tous les modèles, la connexion par défaut entre deux éléments poutre est un encastrement parfait. Il faut pourtant pouvoir libérer des degrés de liberté sur certains nœuds de connexion entre éléments (poutre-poteau, plaque de glissement). Chaque logiciel a des fonctionnalités différentes sur ce point.
Il est important de s’appuyer sur la notice du logiciel et surtout de vérifier, avec des cas de charge simples et avec les déformées statiques ou modales, que le comportement de la connexion est conforme à ce que l’on recherche.
C.6.2 Continuité de maillage
Il arrive qu’au niveau de la ligne ou de la surface de raccord, le nombre d’éléments ne soit pas le même de part et d’autre de la ligne (ou de la surface). Le risque est alors que seuls les nœuds communs (en vert) soient pris en compte comme connexion. (figure ci-dessous).
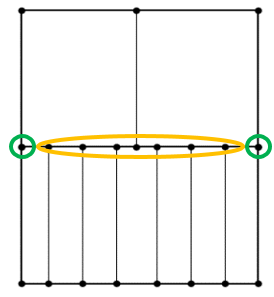
Mauvais raccord d’éléments finis de même type et ddl
Plus communément, on peut aussi créer une zone de transition en utilisant des éléments ayant les mêmes ddl par nœud mais de forme géométrique adaptée (figure ci-dessous).
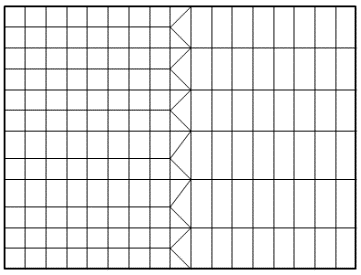
Maillage de la zone de transition
C.6.3 Connexion d’éléments de différentes natures
Le fait d’utiliser dans un même modèle des éléments de nature différente introduit de la complexité et il convient toujours de s’interroger sur l’utilité réelle de mélanger les éléments. La complexité est localisée au droit des liaisons entre des éléments de différentes natures. Ces liaisons peuvent être une liaison poutre/coque, une liaison coque/volume ou une liaison poutre/volume.
On veillera particulièrement à la liaison éventuelle de types d’éléments structuraux différents : élément à 6 degrés de liberté (UX, UY, UZ, ROTX, ROTY, ROTZ) / élément à 3 degrés de liberté (UX, UY, UZ). Ce type de liaison peut occasionner l’apparition d’instabilités ou de rotules non attendues.
Un certain nombre de logiciels compensent ces difficultés avec des éléments spécifiques capables de traiter ces liaisons et les problèmes de degré de liberté. Il convient de s’en assurer et de vérifier la pertinence du comportement local du modèle.
C.6.4 Connexion entre une barre et une plaque
Trois cas se présentent :
-
soit les éléments poutre et plaque sont dans le même plan ;
-
soit la poutre constitue une nervure de la plaque ;
-
soit la poutre et la plaque sont perpendiculaires.
C.6.4.1 Barre et plaque coplanaires
Ainsi pour un élément barre relié à deux éléments de plaques, il convient que le transfert des moments soit assuré par l’intermédiaire d’éléments supplémentaires, ou par l’introduction d’équations de contraintes liant les degrés de liberté.
Dans les illustrations ci‐dessous, dans le cas 1, il risque de ne pas y avoir un transfert correct de moment et rien n’oblige la barre à rester perpendiculaire à la plaque (intrinsèquement les nœuds des coques ne peuvent pas bloquer de moment d'axe perpendiculaire au plan des EF). Le cas 2 consiste à imposer une équation qui lie les déplacements du bord de la plaque avec la barre. C’est une méthode fiable mais qui n’est pas proposée par tous les logiciels. Les cas 3 et 4 consistent à ajouter des barres rigides pour reproduire l’asservissement en déplacement. Il faut notamment prêter attention à la définition de la rigidité de ces barres qui peut être source d’instabilité du logiciel.
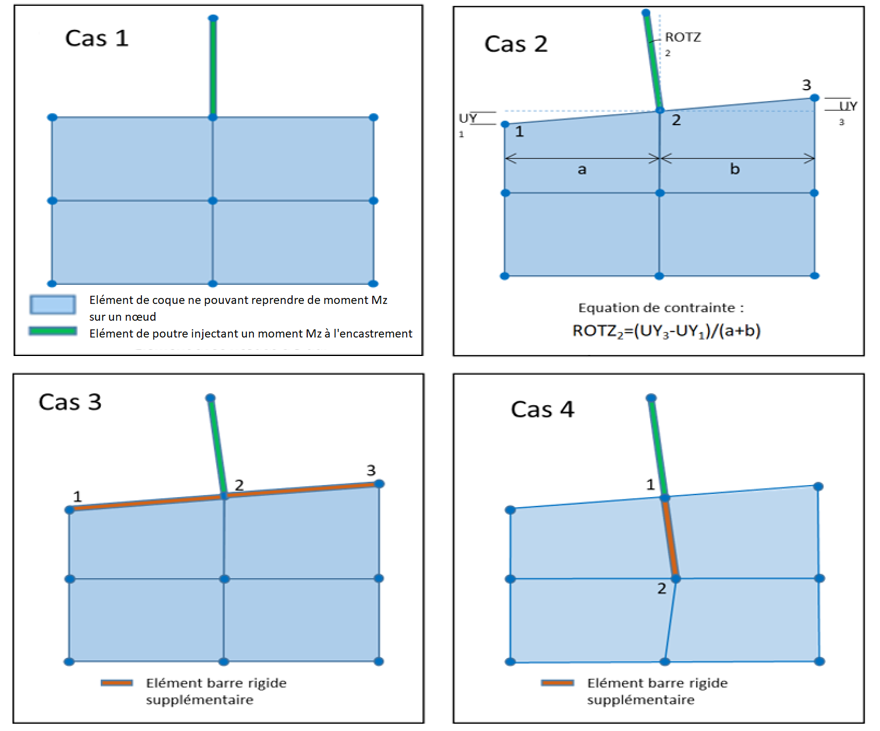
Liaison d'éléments de nature différente - Transfert de moment
C.6.4.2 Connexion entre une barre et une plaque hors plan
Le cas où la poutre joue le rôle d’un raidisseur associé à la plaque comme pour les dalles nervurées est traité de manière détaillée en C.8 Sections composées (poutres/dalles).
C.6.4.3 Connexion d’une barre perpendiculaire à une plaque
Le dernier cas est celui de la connexion poteau-plaque. La grosse difficulté, en plus de la transmission de la flexion de la barre à la plaque, est la transmission de la torsion de la barre à la plaque. Par défaut, la plaque n’ayant pas de dll de rotation autour de l’axe perpendiculaire à son plan, elle ne peut pas reprendre de moment de torsion amené par le poteau. Il faut donc retrouver les bonnes conditions de liaison cinématique. Pour assurer la reprise des efforts de flexion et de torsion de la barre par la plaque, il est nécessaire de disposer des liaisons rigides à la jonction (en rouge sur les schémas ci-dessous)
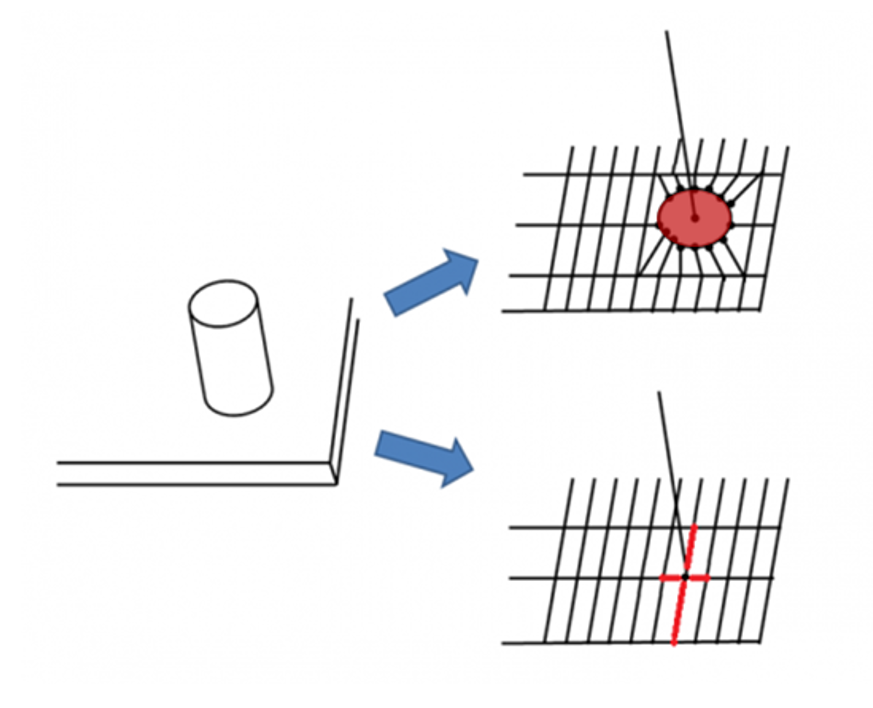
Modélisation du raccord barre-plaque (tablier supporté par un poteau, vu par le dessous)
Exemple du poteau (élément filaire) encastré dans une plaque et soumis à de la torsion.
Illustration de la prise en compte du nombre de degrés de liberté différents entre éléments de nature différente.
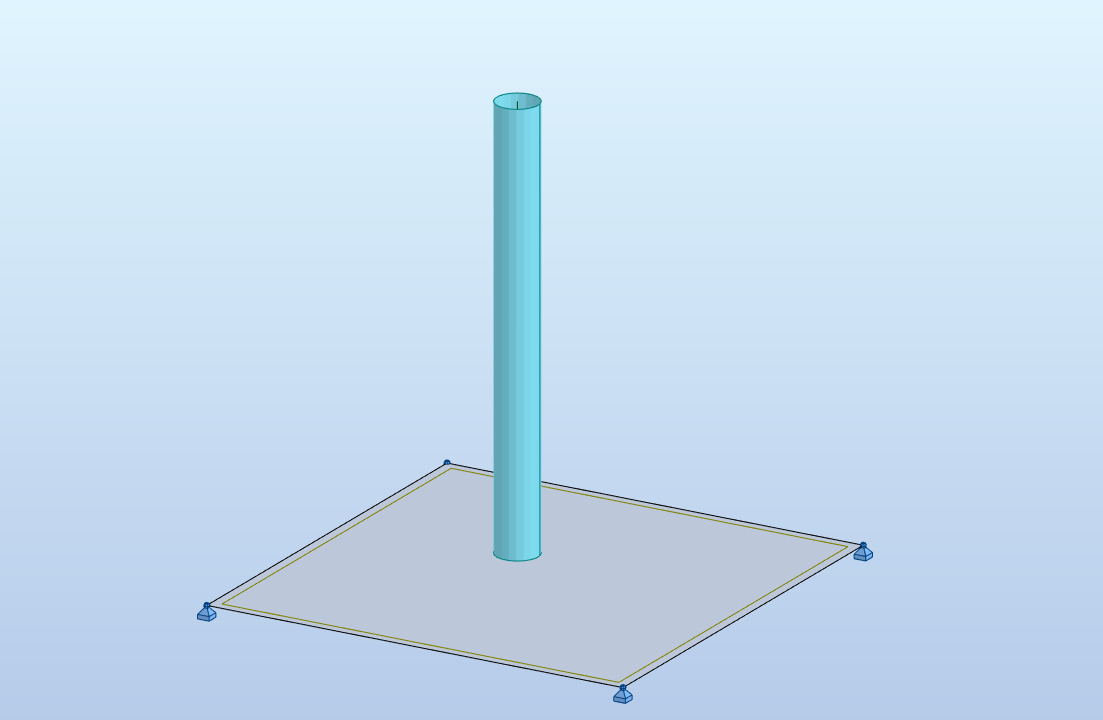
On modélise une plaque de 20 cm d’épaisseur en béton sur laquelle est « encastré » un poteau en béton de 1 m de diamètre, en reliant simplement l’about inférieur du poteau à un nœud de la plaque :
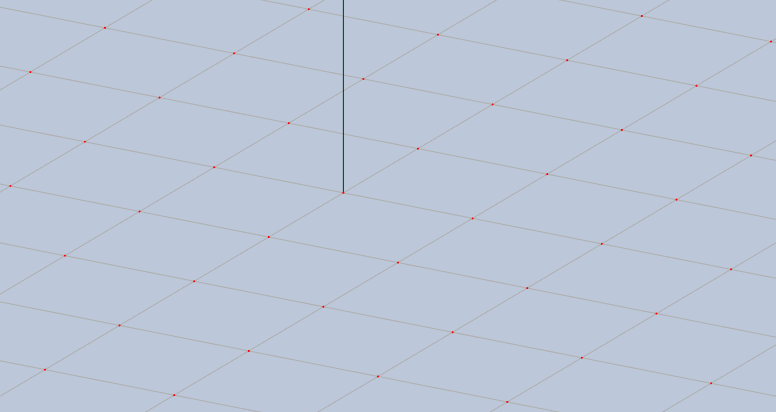
Les translations horizontales sont bloquées aux coins de la plaque de manière à bloquer cette torsion. Le couple introduit vaut 10 MN.m.
Résultats :
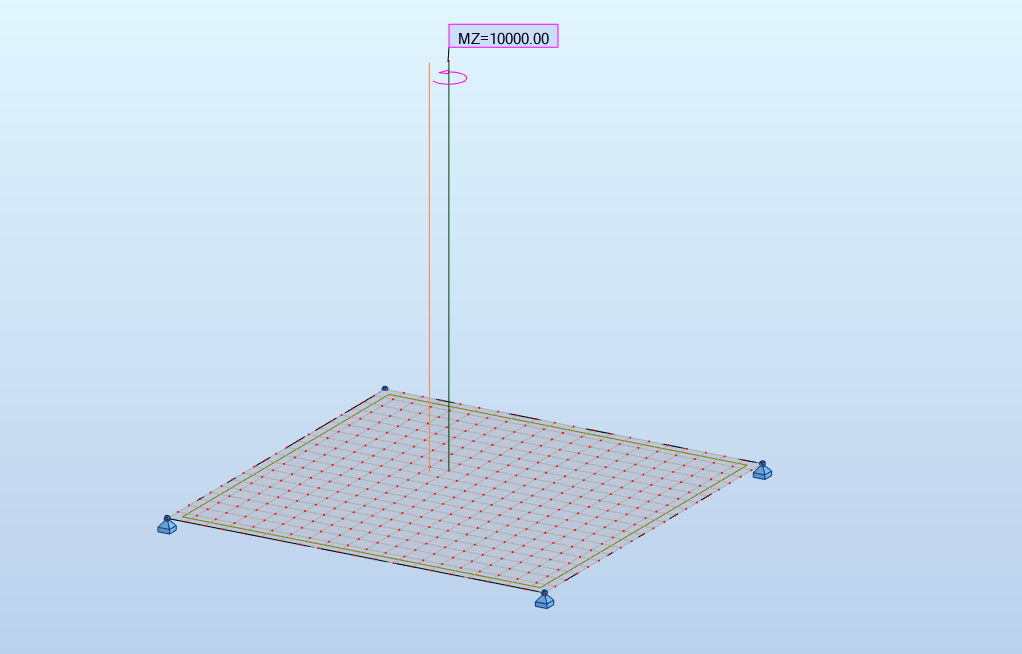
Le calcul informatique converge, malheureusement, mais … plusieurs points peuvent et doivent attirer l’attention du modélisateur dans les résultats :
-
la valeur de la rotation, à la fois en tête et en pied de poteaux (54.2 radians!) ;

-
la présence de moments Mz dans les angles alors que les appuis sont relâchés en Rz ;
-
la somme des réactions n’est pas nulle ;
-
enfin, la valeur des réactions Fx et Fy paraît faible (ordre de grandeur à trouver 10000 kN.m/7 m (bras de levier)/4 points= 360 kN).
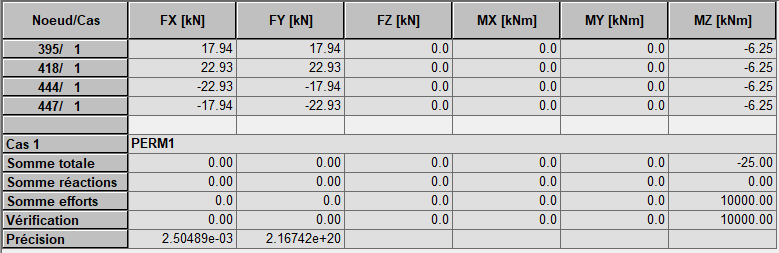
Il suffit de créer un encastrement à l'aide de barres (fictives) en pied de poteau, dans la dalle …
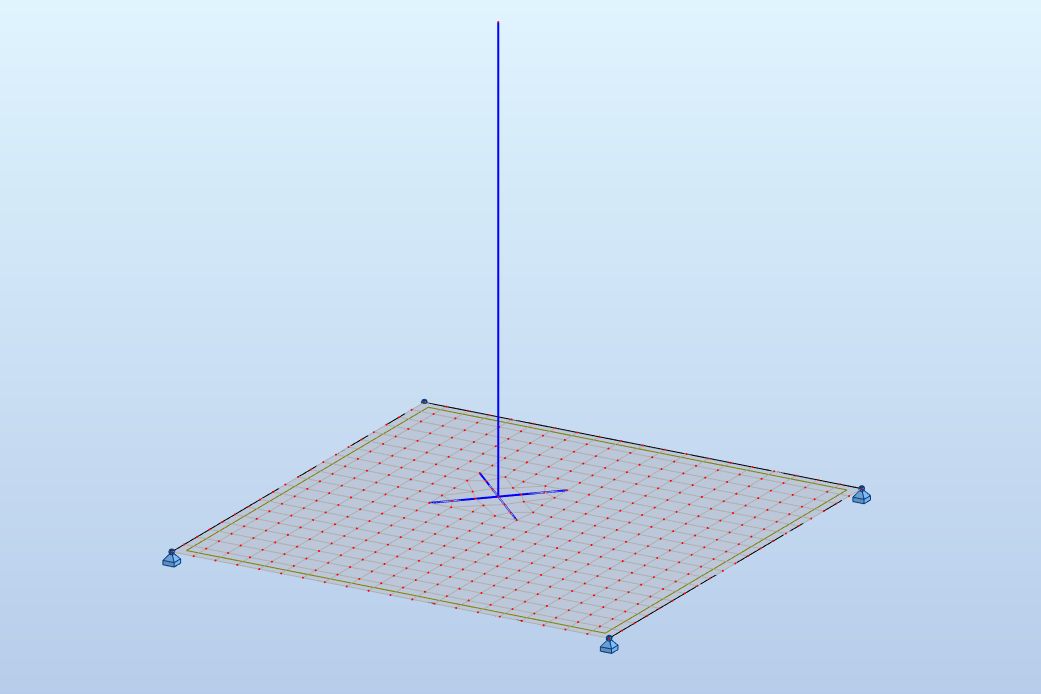
… pour obtenir des résultats globaux justes. (Les efforts locaux en pied de poteau sont bien sûr perturbés par ces barres fictives).
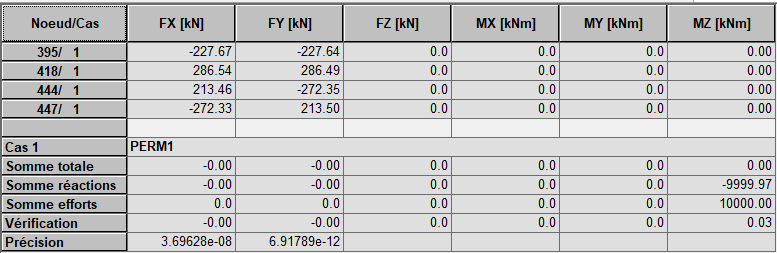
C.6.5 Connexions plaque/volume et poutre/volume
Dans le cas d’un raccord Plaque-Volume, il est nécessaire de mettre en place une liaison permettant d’équilibrer le moment d’encastrement. Comme en C.6.4, on peut soit créer une plaque de liaison à la surface du volume (d’un seul côté ou des 2 côtés) , soit prolonger la coque à l’intérieur du volume.
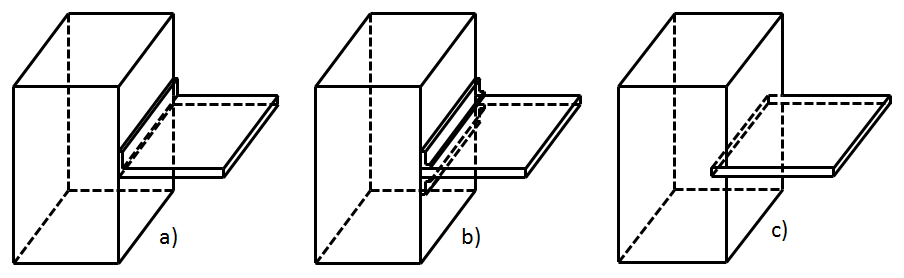
Modélisation du raccord Coque-Volume
On applique le même raisonnement dans le cas d’un raccord Poutre-Volume.
C.6.6 Valeurs de rigidité / écarts de rigidité / « infiniment rigide »
De nombreux logiciels proposent un élément « barre rigide » ou « liaison rigide ».
Cet élément est tantôt un asservissement cinématique (relation mathématique) entre deux éléments et tantôt une barre fictive dont la rigidité est très grande.
Or la présence, dans la matrice globale du système, d’éléments avec de grands écarts de rigidité peut poser des problèmes de convergence. Voir l’exemple final sur le calcul matriciel présenté au paragraphe A.1 .
Ces instabilités ou erreurs numériques n’apparaissent pas forcément avec un message d’erreur.
Dans la plupart des cas, il est conseillé d’utiliser des éléments dont on définit soi-même la raideur et de tester l’influence de cette raideur sur le comportement global.
C.6.7 Liaisons d'éléments de natures différentes : Zoom structurel - Exemples
-
Insertion d'éléments finis de type plaques dans un modèle global
Pour appréhender le comportement spécifique d'une zone particulière d'un ouvrage modélisé à l'aide d'éléments filaires, et pour ne pas avoir à gérer un modèle trop lourd, on peut être amené à y insérer des éléments plaques, en lieu et place des éléments filaires initiaux. La liaison entre ces deux parties de nature différente se fait via des liaisons ou barres rigides en “toiles d'araignées”.
Exemples de liaisons d'un modèle filaire global avec des parties modélisées en plaques :
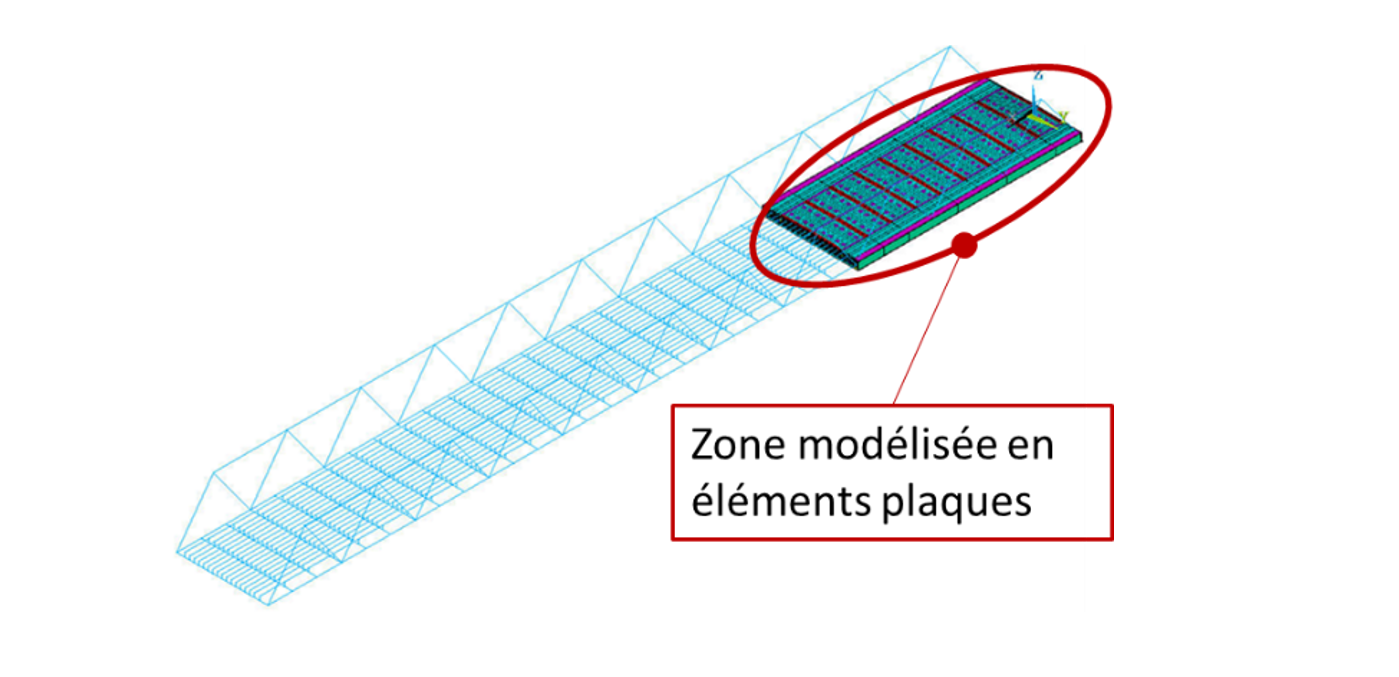
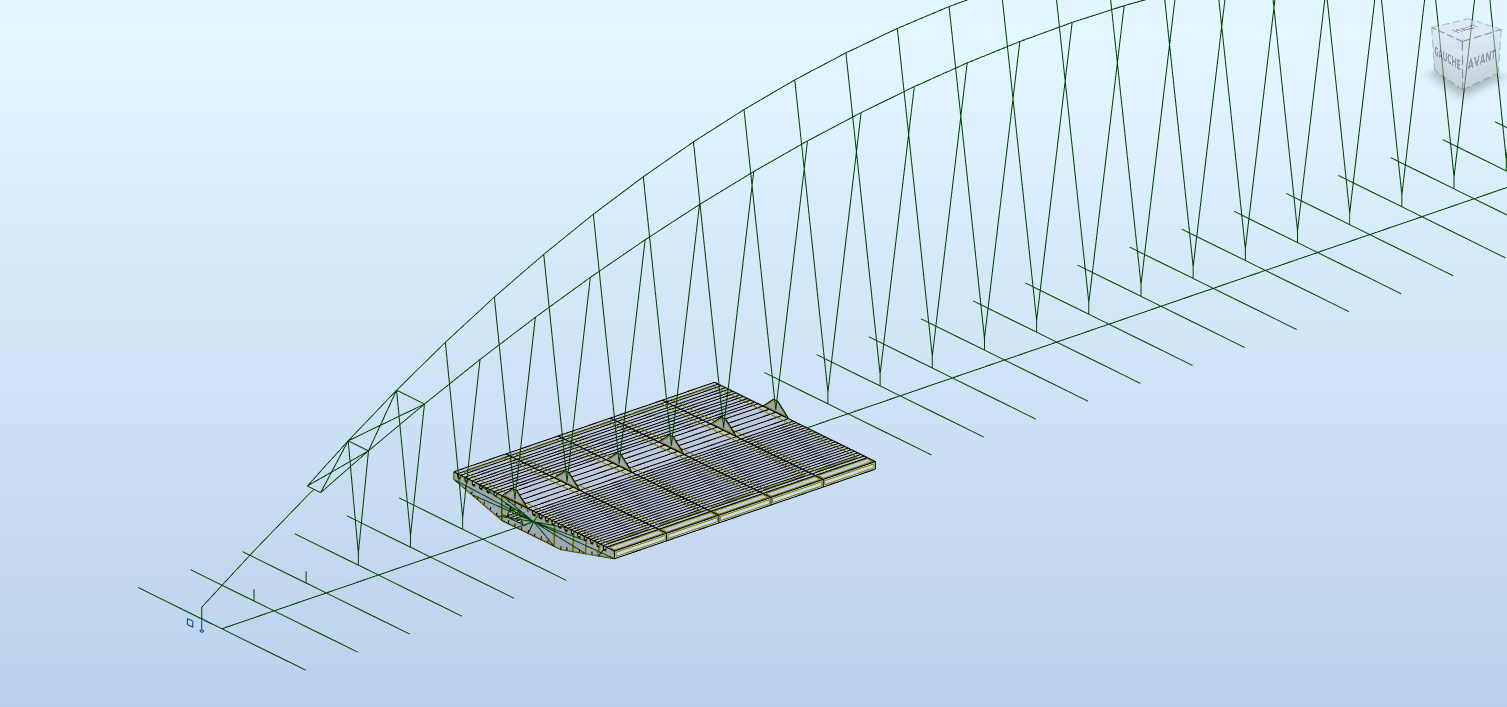
-
Zoom structurel
On peut aussi souhaiter modéliser uniquement une partie de l’ouvrage en éléments plaques et venir placer aux frontières de cette partie les déplacements ou les efforts aux nœuds issus du modèle global filaire (principe du zoom structurel). Ces déplacements ou ces efforts sont alors transmis aux éléments de plaques par l’intermédiaire de liaisons rigides constituées d’éléments de type poutres. Ces zones de liaisons entre poutres et plaques doivent être modélisées suffisamment loin de la zone à étudier pour s’assurer que les efforts introduits par les liaisons rigides soient diffusés correctement jusqu’à la zone d’étude.
Par exemple, dans le cadre de l’analyse d’une zone de raccordement de deux PRS (Poutres Reconstituées Soudées), la zone a été modélisée en éléments plaques et coques (voir figure ci-après). Aux extrémités des PRS modélisés sur une certaine longueur, on introduit des torseurs par l’intermédiaire de liaisons rigides, la structure étant appuyée au niveau de la platine inférieure. La vue ci-après montre que ces liaisons rigides sont situées suffisamment loin (à près de 2 m) de la zone à étudier. Il est à noter que la platine est suffisamment rigide pour ne pas avoir à créer de liaisons rigides.
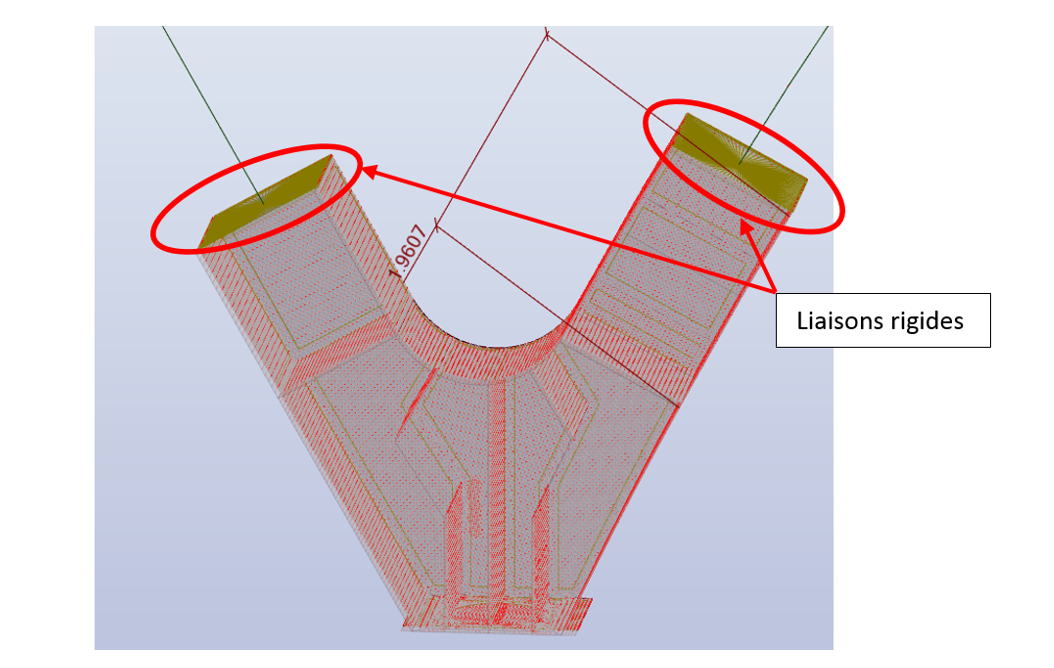
L'exemple ci-après représente la structure singulière du caisson d'about d'un ouvrage d'art relativement large. Les deux réactions d'appuis sont introduites (à droite) sous ce caisson qui est réputé parfaitement encastré dans le tablier (à gauche). Elles sont issues d'un modèle filaire/plaques global. Le poids propre et les charges sur le caisson en lui-même sont modélisées, le cas échéant. Cette approche simplifie l'introduction des données, puisqu'elle ne nécessite que quelques réactions d'appui plutôt que des torseurs complexes à obtenir à la coupure avec le tablier de par la nature du modèle global.
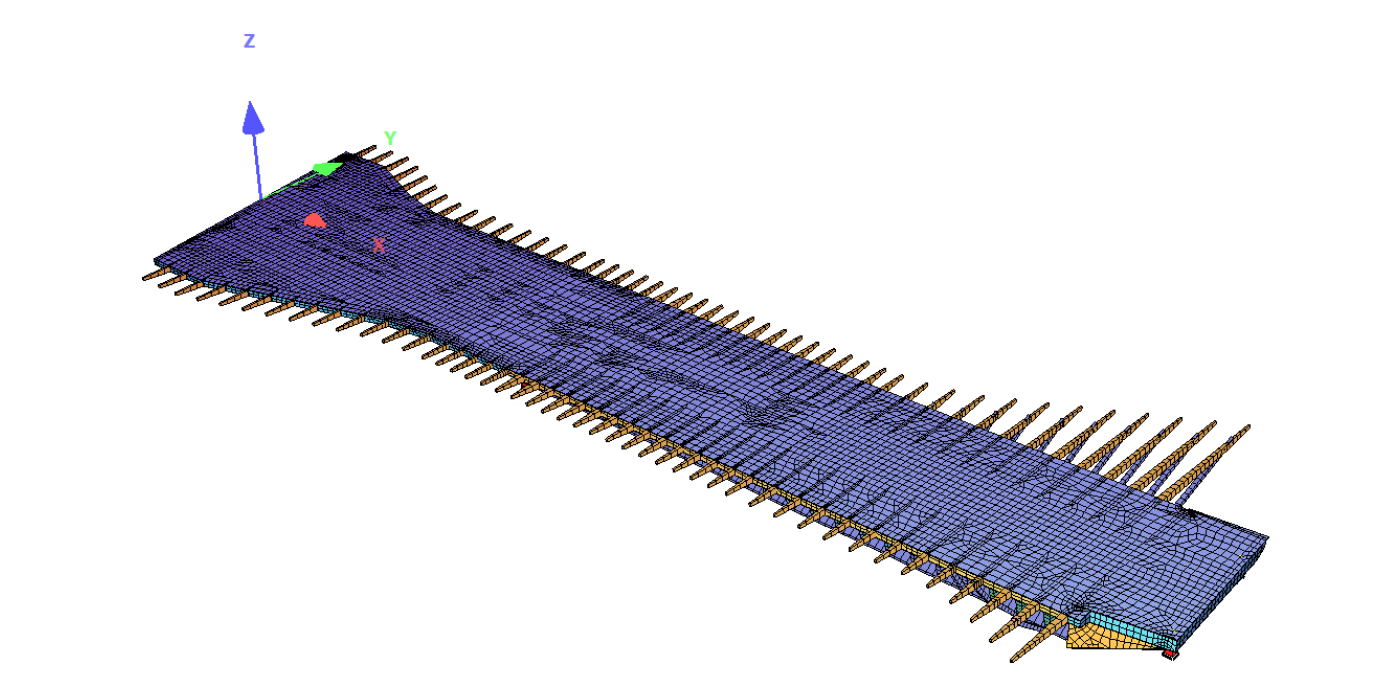
Modèle global avec modélisation simplifiée du caisson d'about.
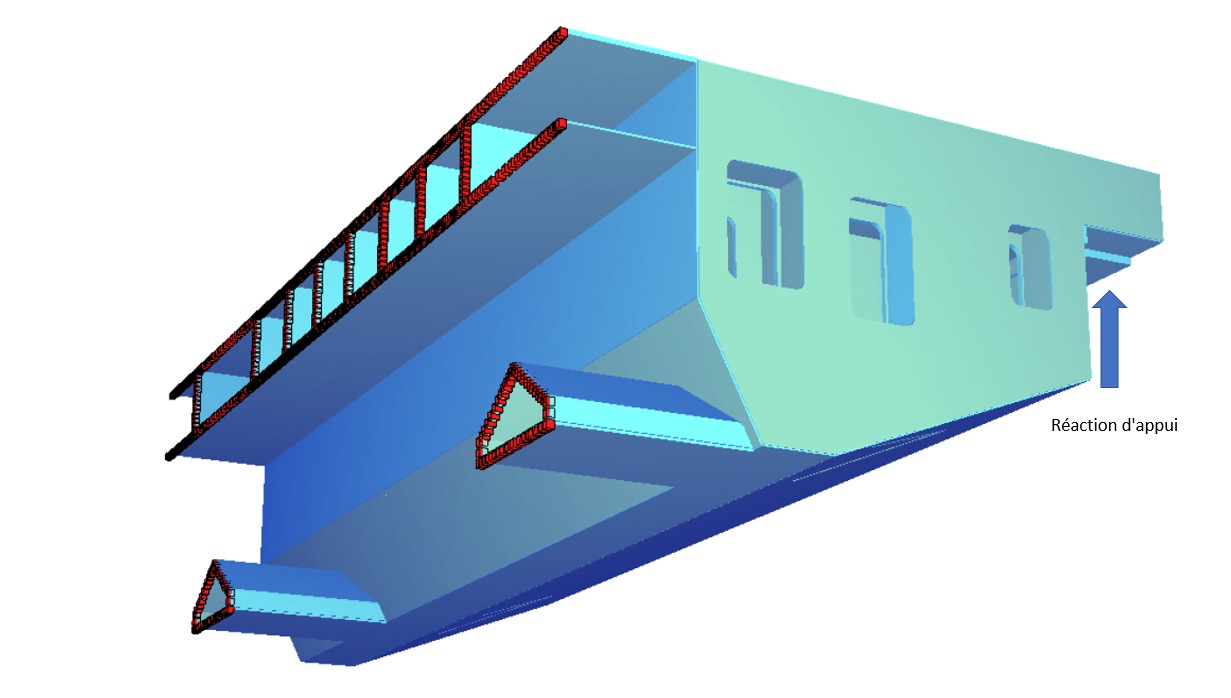
Modèle local détaillé du caisson d'about
C.7 Excentrements
C.7 Excentrements
La plupart des logiciels aux éléments finis proposent des options permettant de définir une poutre sur une fibre autre que sa fibre neutre.
Cette option est très utile, notamment :
-
pour créer facilement des liaisons entre éléments de hauteurs (ou d'épaisseurs) différentes ou variables, mais qui ont une face alignée (voir ci-dessous);
-
pour définir la géométrie d'un tablier de hauteur variable (il est plus simple d'introduire une géométrie d'extrados figée et de gérer par ailleurs un décalage vertical extrados/CDG susceptible de varier, lui, pendant la conception) ;
-
pour l’application des charges sur une face (par exemple sur l’extrados d’un pont, pour la création de “routes” de chargement).
Il convient par contre de définir le décalage entre cette fibre de définition et la fibre neutre, ce décalage étant l’excentrement qui peut varier le long de la barre.
En cas de doute sur le fonctionnement de cette option, on pourra vérifier le bon fonctionnement avec un autre modèle où chaque poutre est définie à sa fibre neutre en créant soi-même l’excentrement avec des liaisons rigides.
Le sujet des excentrements est partiellement illustré dans le document Exemple de précontrainte et excentrement.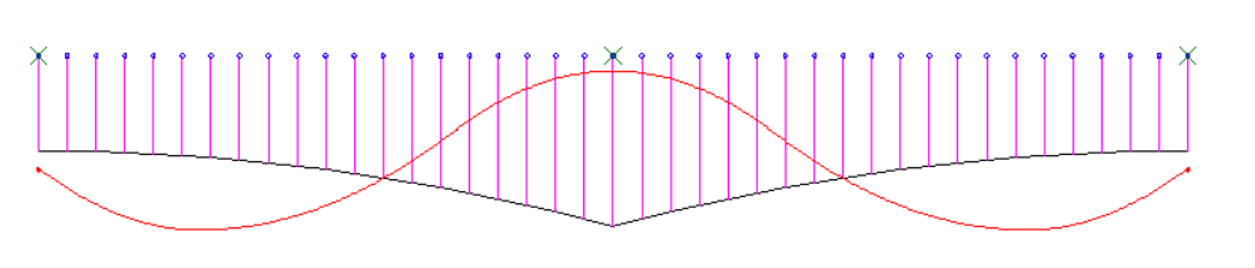
Illustration de l'excentrement d'une série de barres par rapport à un extrados horizontal
$translationBooksC.8 Sections composées (poutres/dalles)
C.8 Sections composées (poutres/dalles)
Les sections composées sont constituées par l’assemblage, rigide ou élastique, d’éléments de nature différente (bois, acier, béton, …) et/ou à des dates différentes.
Nous étudions ici les cas les plus courants rencontrés dans les modélisations :
-
planchers de bâtiments (dalles+poutres) ;
-
poutres d'ouvrages d'art (type PRAD) ;
-
poutres de ponts mixtes acier/béton ;
-
planchers mixtes de bâtiment (profilés métal + dalle BA).
Ces éléments complexifient le calcul avec des approches très différentes selon le cas étudié.
C.8.1 Poutre plancher de bâtiments
Ce chapitre concerne les planchers de bâtiments calculés à partir d'une modélisation globale du bâtiment.
C.8.1.1 Principe du calcul
La difficulté sur ce type d'analyse est de concilier les calculs aux éléments finis avec les règlements de calcul du béton armé.
En effet, les règlements de béton armé (BAEL et EC2-1-1 §5.3.2.1) sont fondés sur des règles précises sur les largeurs participantes, sur le décalage des courbes de moment (qui correspondent à la formation des bielles) et sur le diagramme de déformations des sections (cohérences entre les déformations de la dalle et de la poutre).
Or les modèles éléments finis sont fondés sur la RdM et pas sur ces règlements.
Dans tous les cas, le calcul du ferraillage doit être fait :
-
en tenant compte du sens de portée de la dalle (notamment des éléments préfabriqués) ;
-
en récupérant des efforts du modèle ;
-
en les corrigeant pour tenir compte des largeurs participantes (les bandes non participantes pèsent mais ne portent pas) ;
-
en les corrigeant pour tenir compte des excentrements additionnels non modélisés (verticaux ou horizontaux - effet P-Δ) ;
-
en les corrigeant du décalage des moments ;
-
en refaisant un calcul réglementaire avec ces efforts post-traités.
C.8.1.2 Comment modéliser le plancher poutre/dalle
Le premier point concerne la méthode de modélisation du plancher, en effet plusieurs options se présentent :
-
ne modéliser que les poutres, les charges étant directement appliquées aux poutres ;
-
modéliser les poutres et les dalles sur la même fibre moyenne ;
-
modéliser les poutres excentrées par rapport aux dalles.
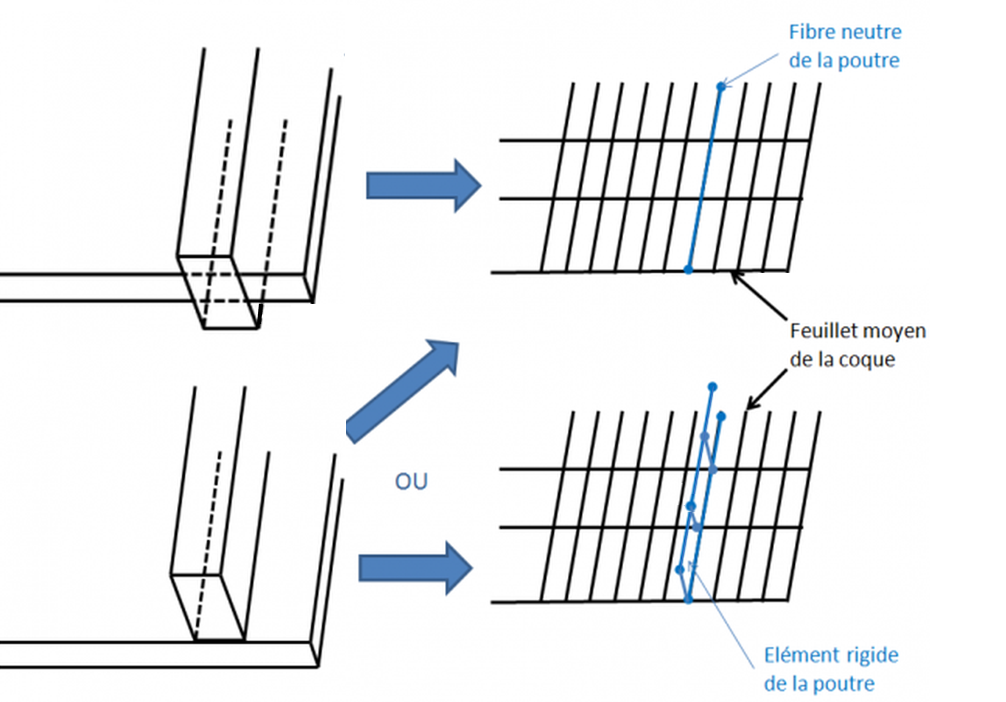
Illustration des deux dernières approches
La comparaison entre ces cas est réalisée à partir de l'exemple suivant :
Soit une structure à 2 travées de 8 m chacune, les poutres 25 cm x 50 cm ht sont espacées de 2 m, la dalle a une épaisseur de 15 cm.
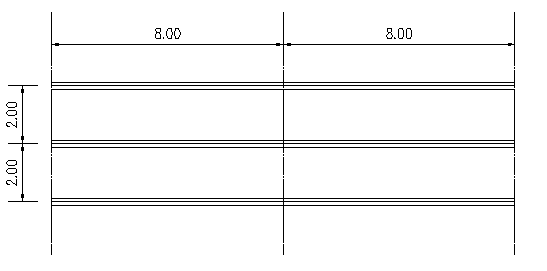
Vue en plan de la dalle
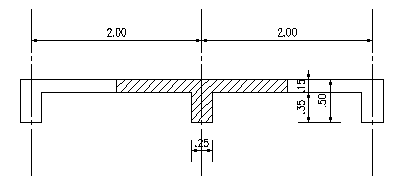
Coupe transversale
On étudiera la poutre centrale :
Chargement = poids propre + charge permanente additionnelle (revêtement) de 3 kN/m2 + surcharges de 5 kN/m2.
Nous étudions le cas ELU (1.35 CP + 1.5 Q).
Il y a 3 types de modélisation :
-
Cas 1 : la dalle n’est pas modélisée, ce qui revient à calculer la poutre selon les méthodes usuelles du béton armé ;
-
Cas 2 : la dalle est modélisée sur la même fibre moyenne que celle de la poutre ;
-
Cas 3 : la dalle est modélisée excentrée par rapport à la poutre.
Etude du cas 1 : modélisation de la poutre seule - la dalle n’est pas modélisée
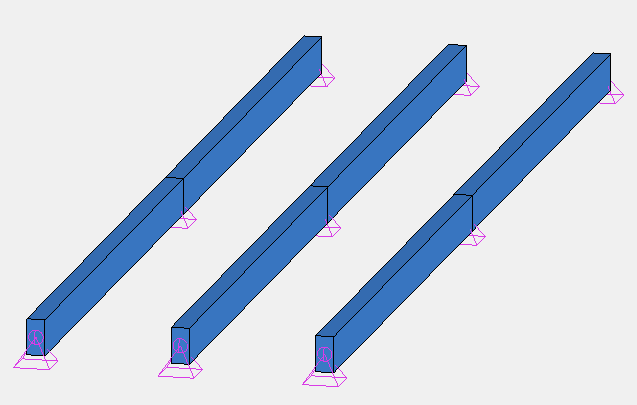
Schéma de la modélisation
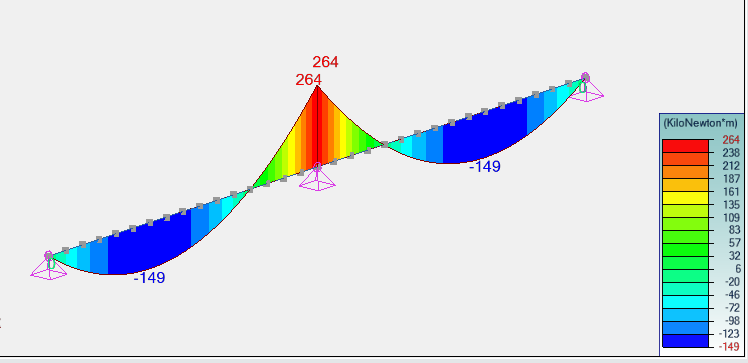
Courbe des moments fléchissants (kN.m) poutre
Les moments fléchissants sont égaux à -264 kN.m sur appuis et 149 kN.m en travée ; ils sont cohérents avec les méthodes classiques de calcul, cela nécessite un ferraillage de 19 cm² sur appuis et de 10 cm² en travée
Etude du cas 2 : la dalle et la poutre sont modélisées sur la même fibre moyenne
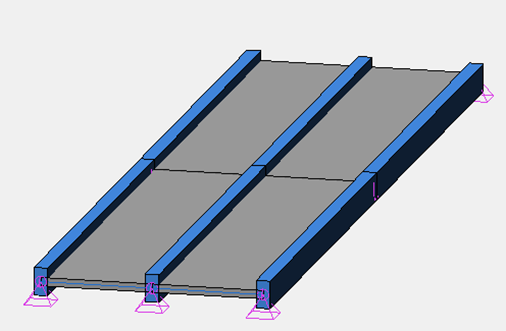
Schéma de la modélisation
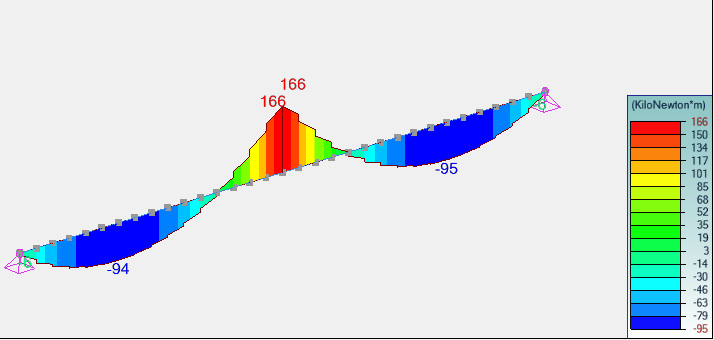
Courbe des moments fléchissants (KN.m) poutre
Les moments fléchissants dans la poutre sont égaux à -166 kN.m sur appuis et 94 kN.m en travée ; ces efforts sont beaucoup plus faibles (-37% !!) que ceux calculés dans le Cas 1 : le ferraillage calculé n’est plus que de 11 cm² sur appuis et 6 cm² en travée.
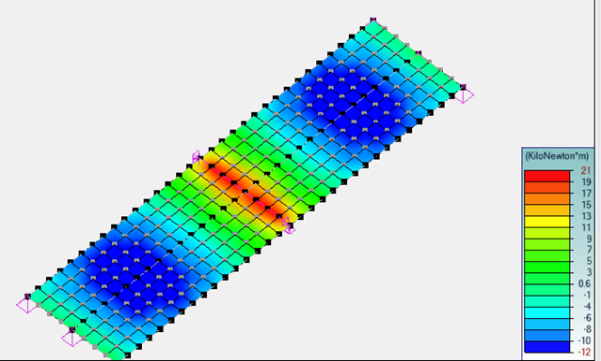
Moments longitudinaux dans la dalle
Les moments fléchissants dans la dalle sont égaux à -21 kN.m/ml sur appuis et 12 kN.m/ml en travée, ce qui se traduit par un ferraillage sur appui As = 5 cm²/ml, Ai = 0 et en travée As = 0, Ai = 3 cm²/ml
Etude du cas 3 : la poutre est excentrée par rapport à la dalle
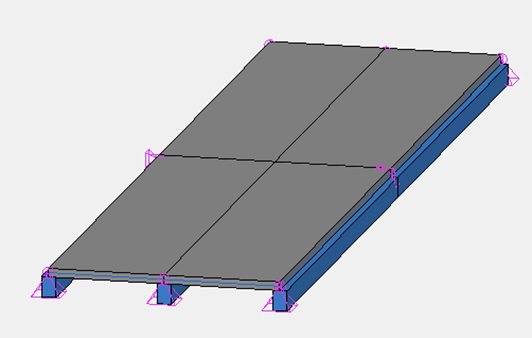
Schéma de la modélisation
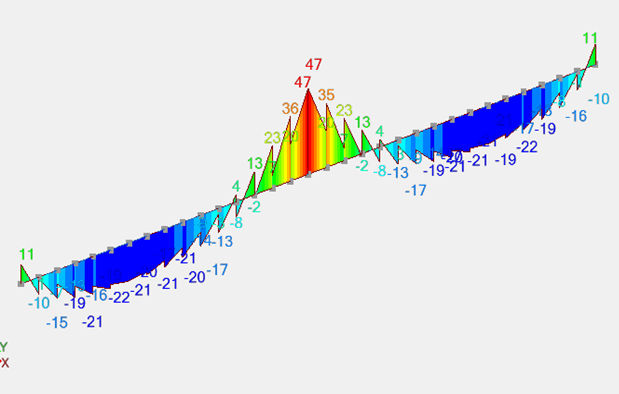
Courbe des moments fléchissants (kN.m) poutre
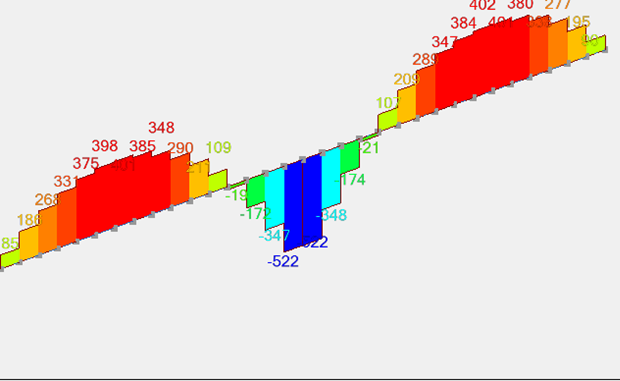
Courbe des efforts normaux (kN) dans la poutre
Les moments fléchissants dans la poutre sont égaux à -47 kN.m sur appuis et 21 kN.m en travée, mais ils sont accompagnés d’efforts normaux (traction sur appuis et compression en travée) ; le ferraillage calculé est alors de 10 cm² en nappe supérieure et 2 cm² en nappe inférieure sur appuis, tandis qu'il n'y a pas d’aciers en travée !!!
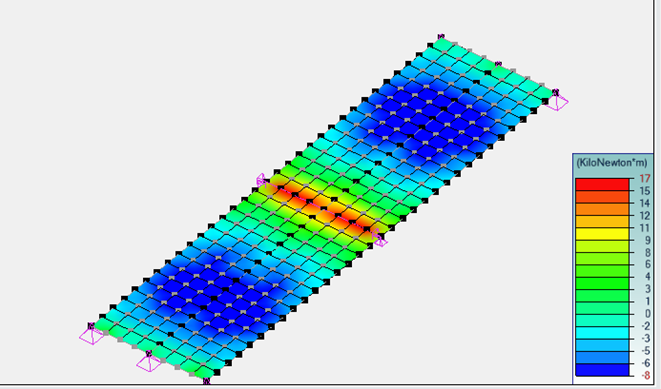
Moments longitudinaux dans la dalle
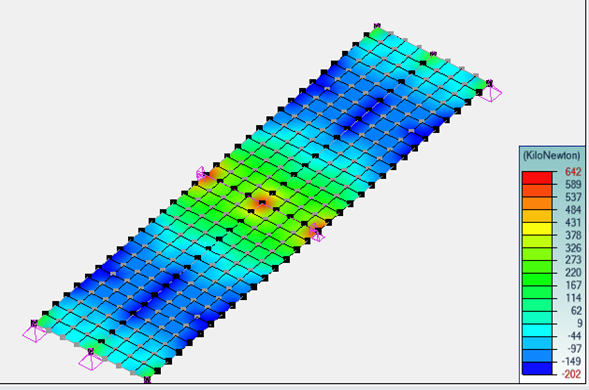
Efforts normaux longitudinaux
Les moments fléchissants dans la dalle sont égaux à -17 kN.m/ml sur appuis et 9 kN.m/ml en travée, ils sont accompagnés d’efforts normaux avec pics sur appuis.
L’analyse montre que le cas 3 avec la prise en compte des excentrements est inexploitable et incompatible avec les calculs réglementaires, car il apparaît des efforts normaux et des pics d’efforts dans la dalle. En effet, comment prendre en compte le décalage des courbes des moments en tenant compte des efforts normaux ?
Les tableaux ci-après résument les principaux résultats.
| Appuis | Travée | ||
| CAS 1 | poutre | 19 cm2 | 10 cm2 |
| dalle | 0 cm2 /ml | 0 cm2 /ml | |
| total | 19 cm2 | 10 cm2 | |
| CAS 2 | poutre | 11 cm2 | 6 cm2 |
| dalle | 5 cm2 /ml | 3 cm2 /ml | |
| total | 20 cm2 | 12 cm2 | |
| CAS 3 | poutre | 10 cm2 | 0 cm2 |
| dalle | inexploitable | inexploitable | |
| total |
Sections d’aciers sur appuis et en travée pour les 3 méthodes de calcul
Les cas 1 et 2 donnent des sections d’aciers proches, ce qui semble valider la modélisation de la poutre et la dalle sur la même fibre moyenne, mais il ne faut pas généraliser les conclusions de cet exemple car, comme le montrent les diagrammes de déformations des sections ci-dessous, il apparait une incohérence en travée avec des aciers tendus dans la dalle, situés au niveau de la zone comprimée de la poutre.
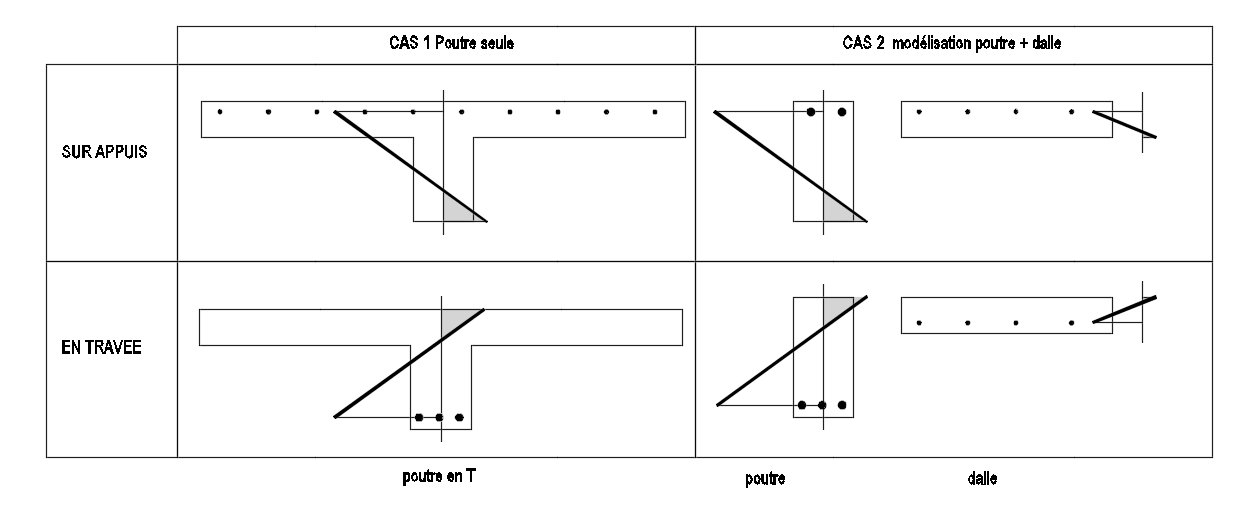
Cet exemple montre que :
-
ne modéliser que les poutres seules donne de bons résultats , mais cette option est difficilement applicable dans une modélisation globale (comment transmettre les efforts horizontaux par exemple ?) ;
-
modéliser un excentrement entre les poutres et les dalles permet une bonne modélisation de la raideur du plancher, mais ce n'est pas compatible avec les vérifications réglementaires (comment décaler la courbe de moments lors qu'une partie des moments apparait sous forme d'efforts normaux dans les poutres ?) ;
-
il ne faut pas calculer les ferraillages des poutres et dalles directement à partir des résultats de la modélisation générale.
C.8.1.3 Méthode générale de calcul d'un plancher poutre/dalle
Les calculs des dalles et des poutres doivent d'une part prendre en compte tous les efforts calculés dans la modélisation globale et d'autre part respecter les règles de calcul réglementaires.
Soit l’exemple d’un bâtiment soumis à des efforts horizontaux (vent, séisme, thermique, etc..) :
Etape 1 : Réaliser un modèle global du bâtiment. Cette modélisation globale permet de calculer les efforts dans les diaphragmes formés par les planchers, ce qui se traduit par l’apparition d’efforts de membranes (efforts normaux et cisaillements) dans les éléments horizontaux. Ce sont ces efforts que nous retiendrons pour la suite du calcul : Nxx,Nyy,Nxy dans les dalles et Nx dans les poutres.
Etape 2 : Réaliser un modèle local de la dalle. En effet, sauf cas très particulier, il n'est pas possible d'utiliser le modèle global d'un bâtiment pour justifier les dalles car, par exemple :
-
le phasage n'est généralement pas modélisé ;
-
les prédalles ne sont généralement pas modélisées ;
-
le positionnement des charges dans un modèle global ne respecte pas forcément les zones d'influence des poutres et dalles à l'échelle locale ;
-
du point de vue réglementaire, les poinçonnements, les redistributions d'efforts, les majorations forfaitaires des efforts, etc., ne sont pas pris en compte.
Dans le modèle local de la dalle, sa géométrie est extraite de la géométrie du modèle global. Dans un soucis de simplification, les poutres sont généralement remplacées par des appuis linéaires, tandis que les dalles sont modélisées par des éléments de coques (flexion) soumises aux chargements pondéraux. C'est ce modèle plan et de petite taille qui va être étudié de manière réglementaire en tenant compte éventuellement du phasage, des prédalles, etc..
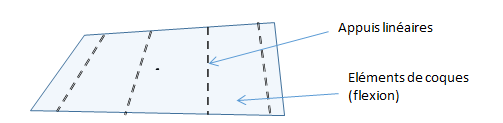
Les efforts de flexion (Mxx,Myy,Mxy) dans les dalles, résultants de ce modèle local doivent être cumulés aux efforts normaux (Nxx,Nyy,Nxy) de la modélisation globale pour calculer les ferraillages et procéder aux vérifications réglementaires (attention aux combinaisons).
Etape 3 : Réaliser un modèle local pour le calcul des poutres. En effet, pour des raisons identiques à celles évoquées pour les dalles, il n'est pas possible d'exploiter le modèle global pour déterminer l'intégralité des sollicitations dans les poutres.
La géométrie est identique à celle du modèle local de la dalle, si ce n’est que les poutres sont bien sûr conservées.
Dans ce modèle, les dalles ne doivent pas reprendre des efforts de flexion, elles doivent simplement jouer le rôle de transmission des charges sur les poutres, elles sont donc modélisées par des surfaces de répartition (se référer à la documentation du logiciel utilisé).
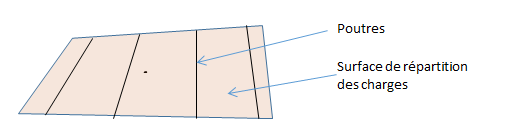
Les efforts résultants dans les poutres sont à cumuler aux efforts normaux de la modélisation générale, ce qui permet de procéder ensuite aux calculs réglementaires des poutres (soit manuellement, soit par logiciel dédié).
C.8.2 Cas des ouvrages d'art (dalles nervurées)
Cette approche s'applique aux ponts de type PRAD, VIPP, …
Pour le calcul des ouvrages d'art, si l'on omet la méthode de Guyon-Massonnet, la pratique consiste à calculer les structures:
-
en grillages de poutres, c'est à dire un croisement de barres longitudinales, représentant la section des nervures + le hourdis participant, et de barres transversales, modélisant le hourdis : l'avantage est que l'on a directement des torseurs exploitables en calcul de béton armé ou précontraint, l'inconvénient peut être le placement des charges, surtout les charges mobiles ;
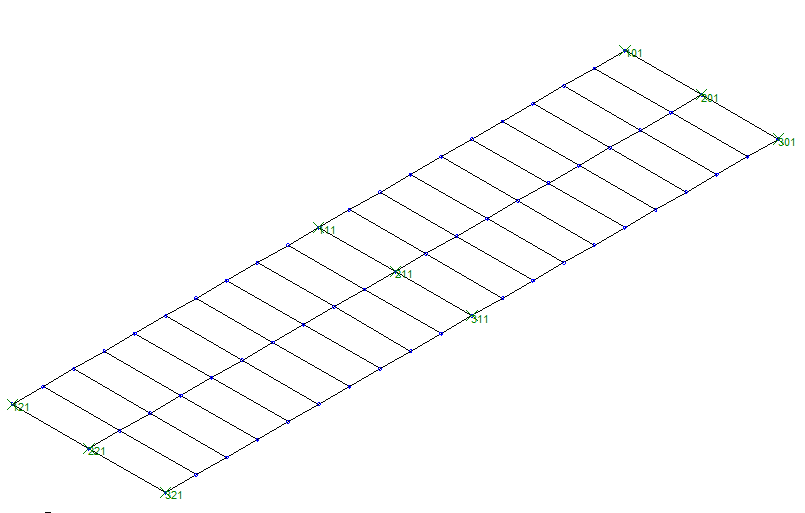
Modèle en grillage de poutres
-
en grillages de poutres utilisant des poutres échelles - peut être avantageux pour un calcul phasé, surtout si l'on veut modéliser finement des effets liés au fluage ou au retrait ;
-
comme dans la troisième approche ci-dessus (C.8.1.2), en modélisant les nervures via des barres et le hourdis excentré sous forme d'une coque EF : l'avantage réside dans le placement facilité des charges, l'inconvénient est que l'on n'obtient pas directement des torseurs exploitables en calcul de béton armé.
Il est à noter que les barres modélisant le hourdis doivent être perpendiculaires (ou quasi-perpendiculaires) entre elles pour que le modèle soit valide.
Pour illustrer cette approche, en particulier le ferraillage du hourdis et des nervures, nous repartons de l'exemple traité en C.8.1.
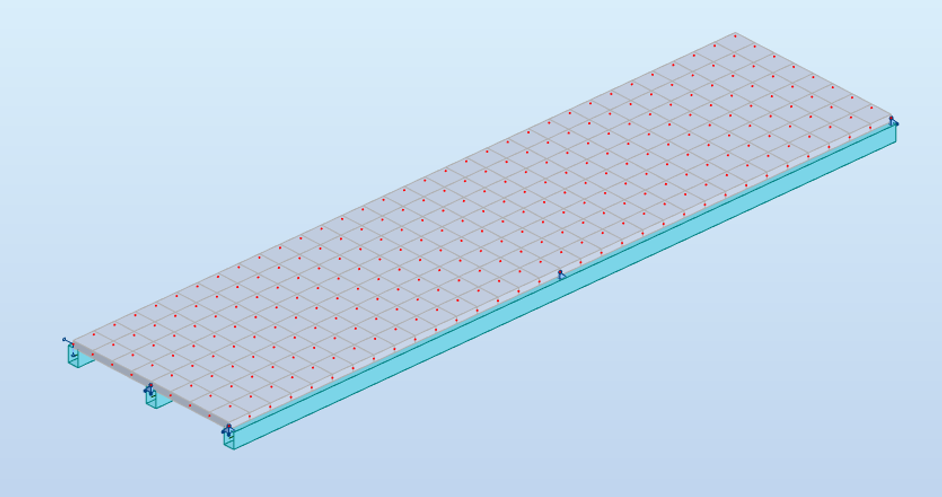
Vue du modèle – retombées 25 cm x 35 cm ht et hourdis de 15 cm d’épaisseur. Portées 2 x 8 m – entraxe des poutres 2 m.
Le calcul des armatures directement à partir d’un module de ferraillage n’est pas recommandé si l’on veut tenir compte des hypothèses en usage pour le calcul du béton armé. Un petit post processeur (un tableur) suffit à calculer le moment et la largeur de table affectée à la nervure, comme nous le verrons ci-après.
Application à la poutre centrale du modèle - section sur appui et section en travée (nota: les deux travées sont chargées par la charge d'exploitation en totalité, sans considération de ligne d'influence):
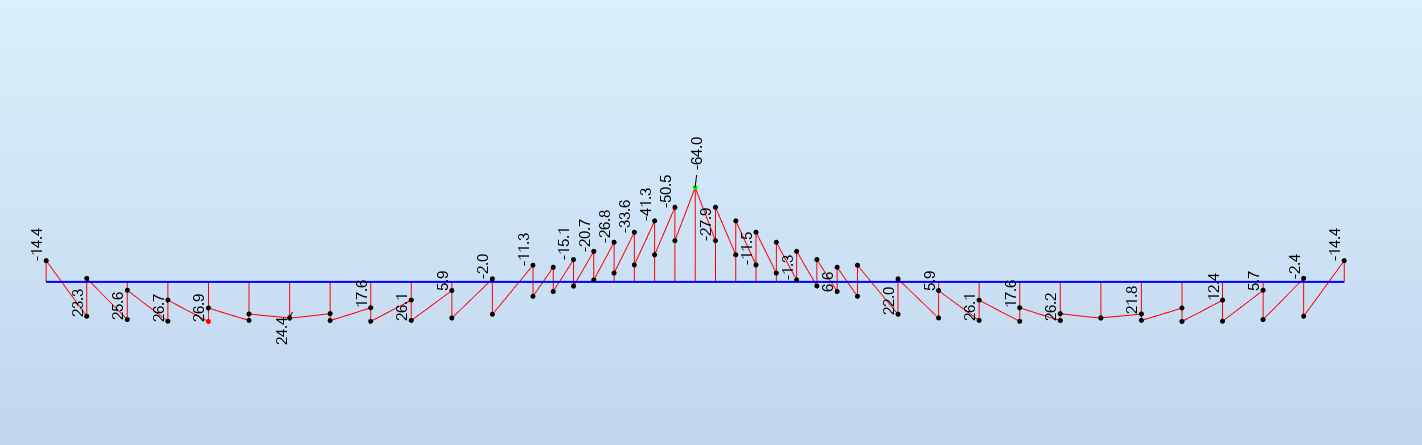
Moments de flexion (retombée seule) - kN.m
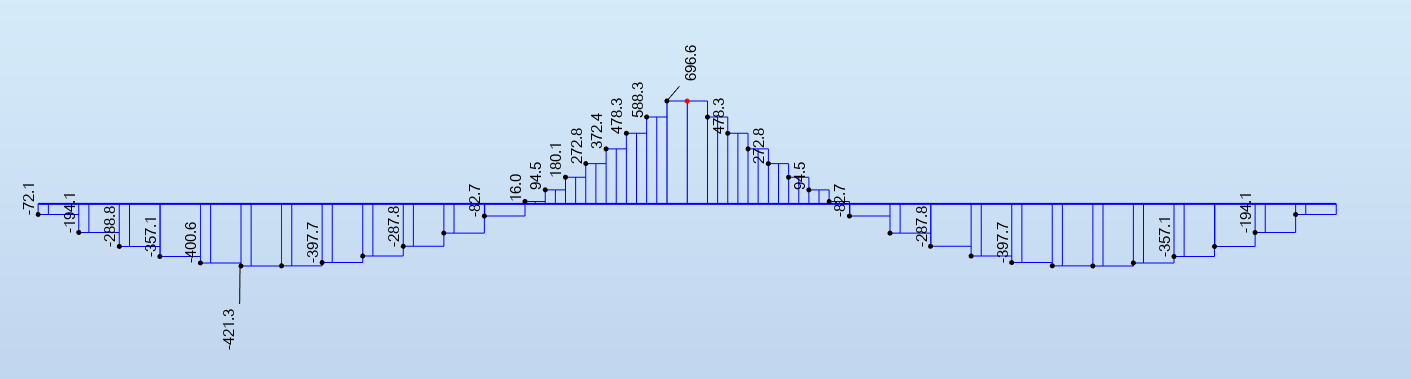
Effort normal (retombée seule) - kN
La méthodologie consiste à appliquer le principe courant de la conservation des sections planes et à calculer l'équilibre (élastique) des efforts internes. 1. Le diagramme des contraintes est prolongé pour obtenir la contrainte sur la fibre supérieure (dessus de dalle) 2. L’effort normal sur la section composée est nul : l’intégration des contraintes normales doit donner une résultante nulle, la largeur participante de hourdis s’en déduit 3. Tous les paramètres géométriques et de contraintes sont déterminés, il ne reste alors plus qu’à calculer le moment résultant du diagramme des contraintes.
Application au cas de la section sur appui :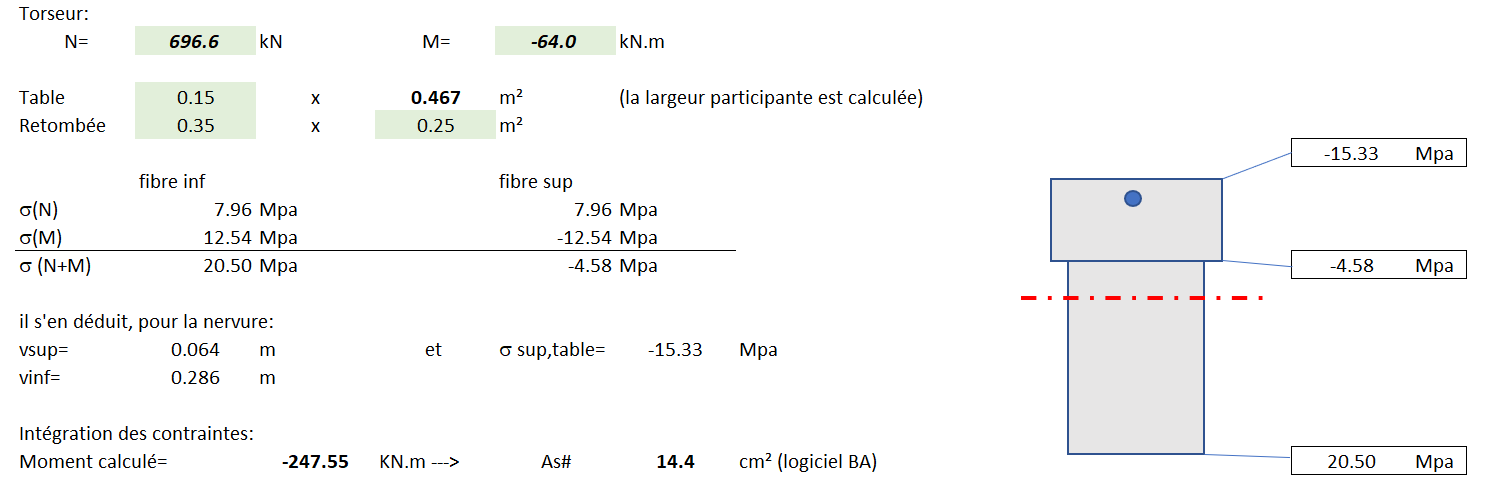
On note une largeur de table réduite (47 cm), ce qui est logique compte tenu de l’effet de traînage de cisaillement. As=14.4 cm² (calcul aux ELU).
Application au cas de la section en travée :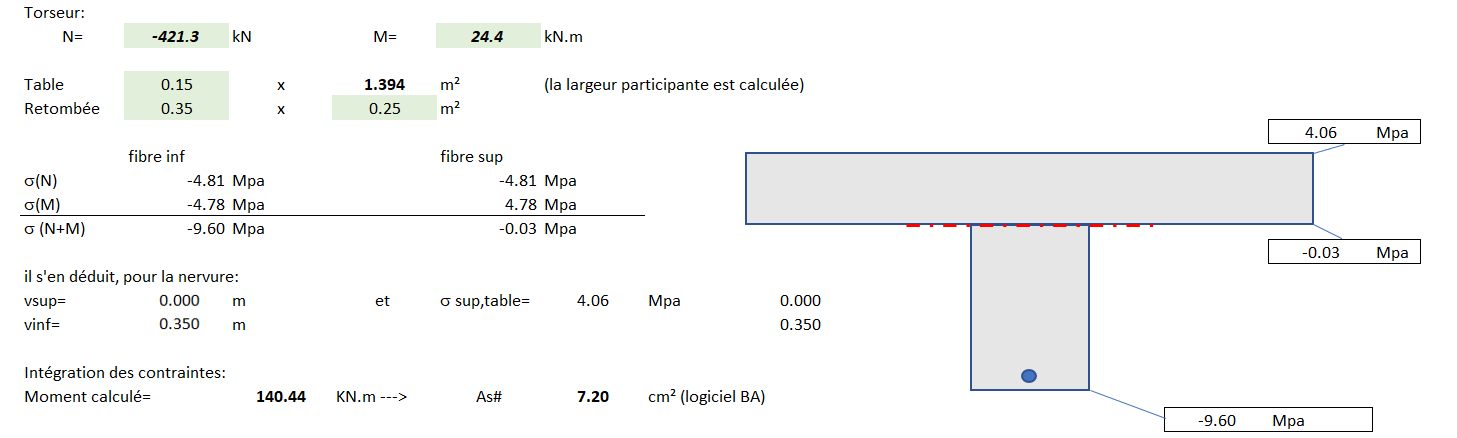
On note une largeur de table plus conséquente (139 cm), valeur logiquement plus importante que sur appui. As=7.20 cm² (calcul aux ELU).
Si on effectue un calcul automatisé dans la nervure et dans la dalle :


→ Le logiciel propose des sections d’armatures à des localisations qui, de fait, n’en nécessitent pas lorsque l’on effectue un calcul de béton armé «manuel» (il a bien été vérifié en parallèle qu’aucune section d'acier comprimée n’était nécessaire).
→ Dans le cas présent, l’approche automatisée conduit à un très léger déficit d’armature inférieure en travée et un surplus d'armature en fibre supérieure.
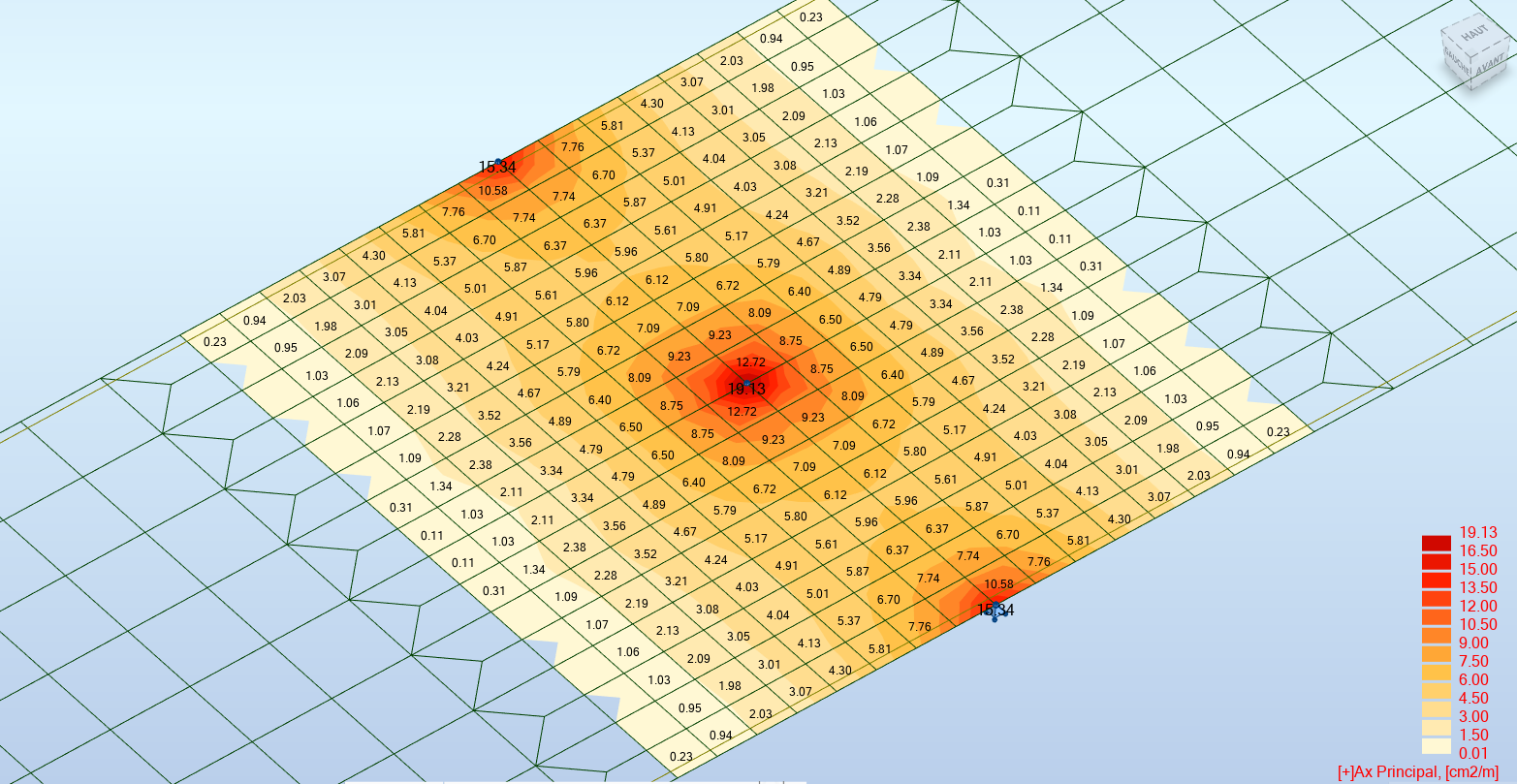
Cartographie des armatures en fibre supérieure du hourdis
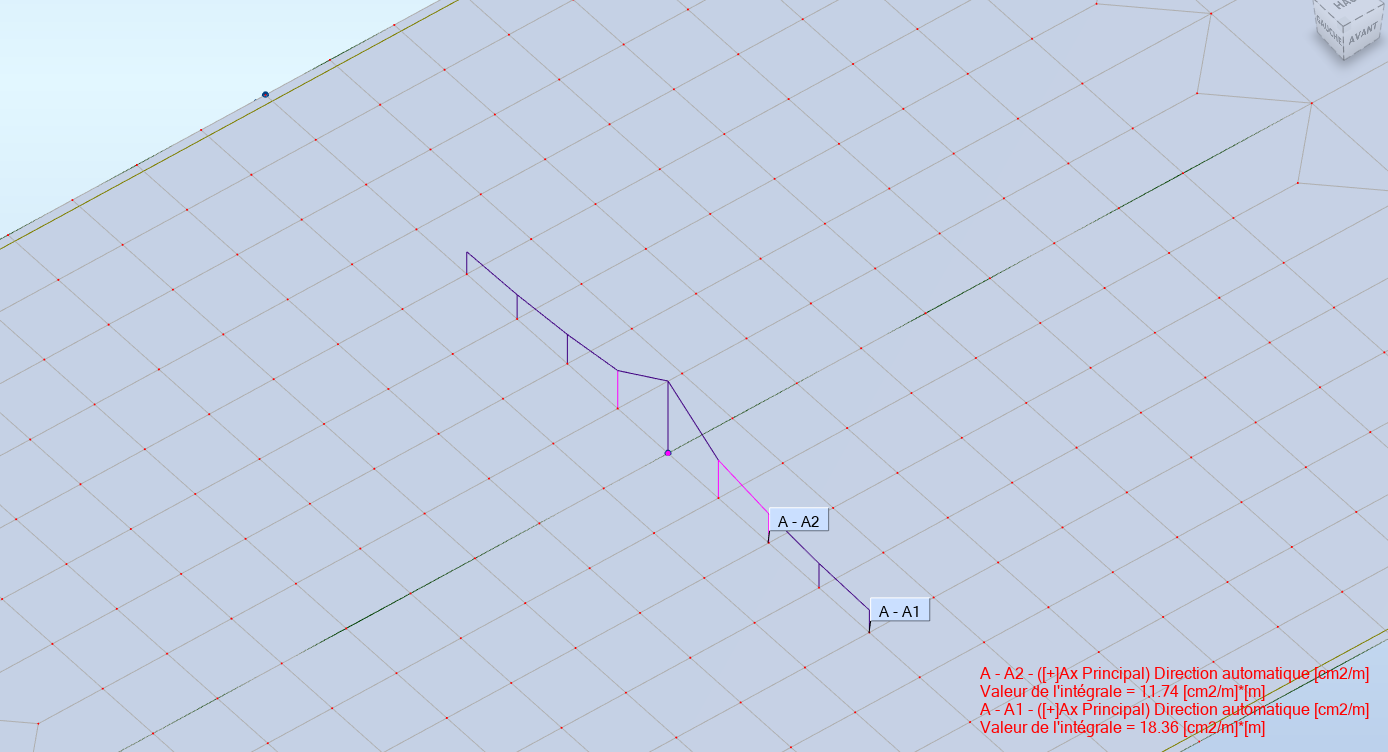
Armatures en fibre supérieure du hourdis sur l'appui central, poutre centrale (18.36 cm² sur 2 m)
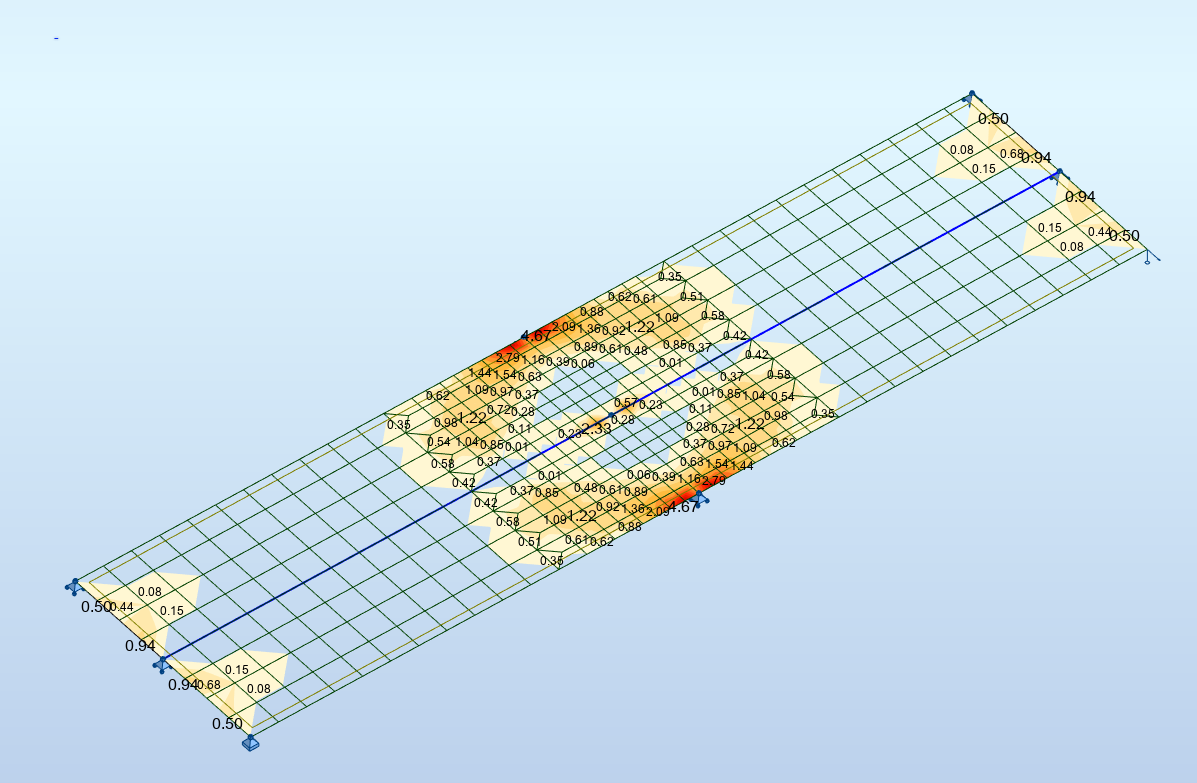
Armatures en fibre inférieure du hourdis
Les efforts calculés via le modèle en grillage de poutres sont les suivants et conduiraient à 7.2 cm² en travée et 15.4 cm² sur appui: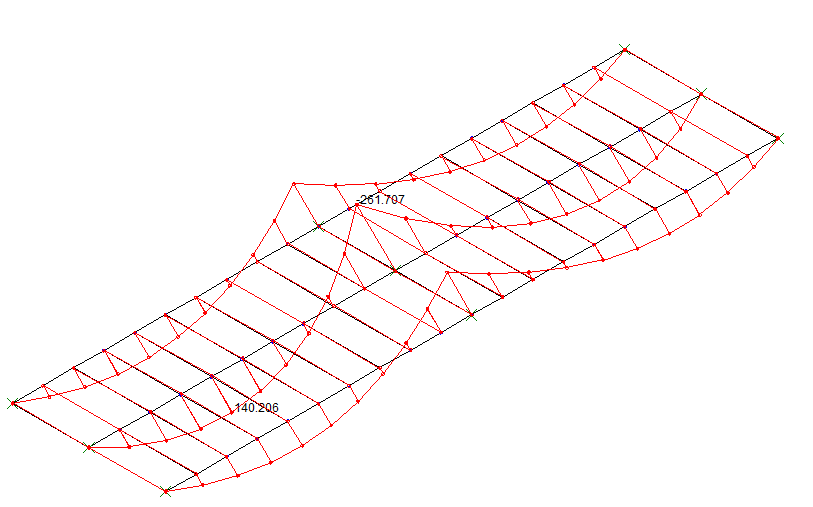
Modèle grillage de poutres (Mt = 140 kN.m, Ma = -262 kN.m) - sans prise en compte des largeurs participantes
En conclusion, sur l'exemple ci-dessus, on se rend compte que le calcul automatisé du ferraillage n'est pas satisfaisant. Sans considération de % mini, il conduit à placer des armatures dans des zones où un calcul réglementaire n'en demanderait pas et à sous et sur-armer certaines zones. En sus, rappelons encore un fois que le calcul automatisé ne tient compte ni d'un décalage de la courbes des moments, ni du poinçonnement, ni des bielles d'about… Il appartient, encore une fois, à l'ingénieur d'analyser les résultats et de tenir compte ou non de certains d'entre eux. Notons que la problématique de lissage des efforts ou des armatures se pose à nouveau en cas d'utilisation d'EF de type dalle ou coque.
D'autres exemples sont donnés en Exemple C - Modélisation de grillages de poutres.
C.8.3 Poutres et dalles mixtes acier-béton
En règle générale, on modélise le caractère composé des sections. Dans certains cas, toutefois, la modélisation peut se limiter à la poutre principale seule, sans tenir compte du phasage, par exemple, pour un prédimensionnement. Après calculs, les sollicitations de la poutre métallique sont alors utilisées pour venir dimensionner et vérifier le comportement de la poutre mixte selon le référentiel réglementaire approprié. Le modèle ne détecte pas que c'est une poutre mixte et il y a une petite erreur sur la raideur dont il faut évaluer l'acceptabilité.
Lors de la justification réglementaire de la poutre, il conviendra de tenir compte du caractère mixte et du phasage de construction.
Approches de modélisation :
Pour un calcul plus rigoureux, il est possible de modéliser la poutre mixte :
-
soit sous forme d’une poutre dont les caractéristiques mécaniques tiennent compte de la connexion de l'acier et du béton. Pour cela, on appréhende la différence des modules d'Young des deux matériaux via un coefficient d'équivalence - on dit dans cas qu'on homogénéise les matériaux, généralement en ramenant le béton à une équivalence métal. (a)
-
soit par deux poutres superposées, l'une, inférieure, métallique, l'autre, supérieure, en béton, à l'altimétrie de leur centre de gravité respectif. Ces barres sont reliées à leurs extrémités par des liaisons rigides. Ceci peut faciliter la prise en compte d’un retrait et d’un fluage différentiel. Si l'ouvrage est modélisé dans sa globalité, les barres longitudinales en béton décrites ci-dessus sont, en complément, reliées par des barres transversales de manière à former un “grillage” de poutre. (b)
-
on peut également choisir de remplacer les éléments de barres du hourdis par des éléments finis de type coques ( c). Dans ce cas, le calcul des torseurs nécessite un post-traitement, idéalement automatisé, suivant la méthode décrite en C.8.2.
Les approches (b) et ( c) sont à réserver à des cas particuliers, car, si dans un premier temps elles peuvent paraître plus simples, les pré- et post-traitements sont toujours beaucoup plus longs qu'avec un modèle de type (a), surtout si l'on utilise un logiciel dédié aux calculs mixtes.
Pour tenir compte du phasage, on doit, à chaque modification d'état, soit modifier l’inertie de la poutre homogénéisée (a), soit activer les poutres du hourdis (b) ou les coques ( c), par exemple dès lors que le béton a fait prise et est décoffré. Il faut bien sûr tenir compte du fluage du béton, soit à l'aide d'un coefficient d'équivalence, soit via une loi de fluage et des zones dites fissurées.
Exemple d'un ouvrage mixte modélisé suivant l'approche (a) :
Exemple d'un ouvrage mixte dont la dalle est modélisée par des éléments de coque excentrés - approche ( c). Les poutres métalliques sont dans ce cas modélisées strictement suivant la répartition matière (métal seul):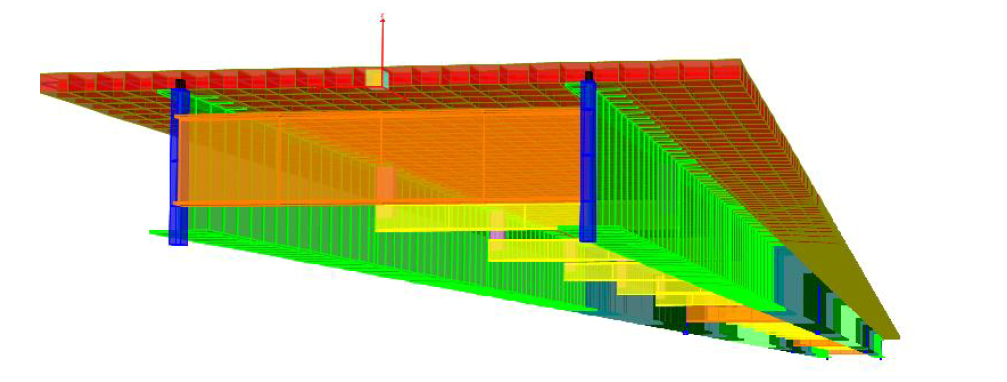
L'emploi d'un logiciel spécifiquement développé pour les calculs mixtes est toujours recommandé lorsque cela est possible.
Voir en Partie 3, l'exemple B - Bipoutres mixtes et métalliques.
C.8.4 Plancher mixte (bâtiment)
Un plancher mixte est composé de poutres métalliques supportant des dalles en béton armé (prédalles ou non) ou en bac acier métallique.
C.8.4.1 Charges pondérales et verticales : sens de portée des dalles
Les calculs des efforts dans un plancher mixte sont réalisés en considérant la résistance des poutres métalliques seules. Le béton est alors considéré comme un poids mort non résistant. De plus généralement ces planchers sont constitués de bacs aciers collaborants qui ne portent que dans un seul sens. Ces particularités nécessitent des dispositions spécifiques dans les modélisations.
Dans le cas de géométrie simple, la dalle en béton n’est pas modélisée et les charges sont appliquées directement sur les profilés métalliques.
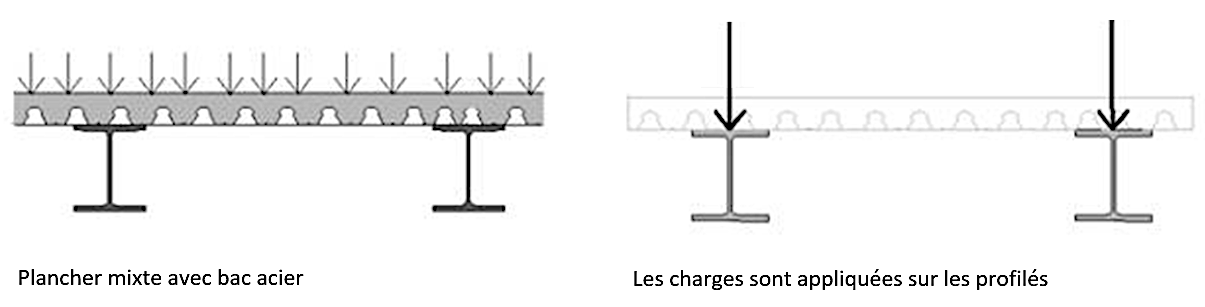
Lorsque la géométrie est complexe, la répartition manuelle des charges sur les profilés devient trop délicate, il faut alors faire appel aux calculs des répartitions des charges par le logiciel en utilisant les surfaces de répartition. Les logiciels les plus courants possèdent ce type d’élément qui se comporte comme une plaque d’épaisseur très faible, sans rôle résistant mais répartissant les charges sur les poutres porteuses. Des options permettent de prendre en compte les sens de répartition des bacs aciers, mais cela demande une grande attention afin de bien respecter les sens porteurs, les vérifications sont indispensables. Prenons l’exemple des pétales de la fondation LUMA à Arles constituées de plancher mixte avec bac acier, elles sont représentées en bleu dans le schéma ci-après …
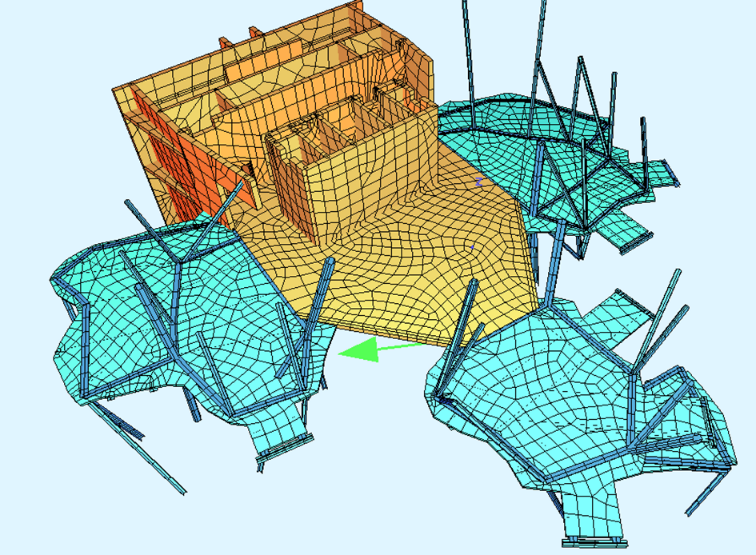
Les surfaces de répartition en bleu sont maillées comme des dalles, mais ne participent pas à la résistance de la structure.
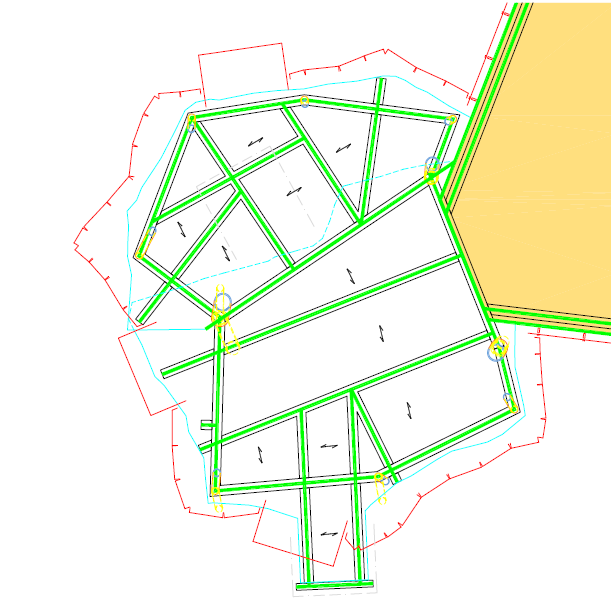
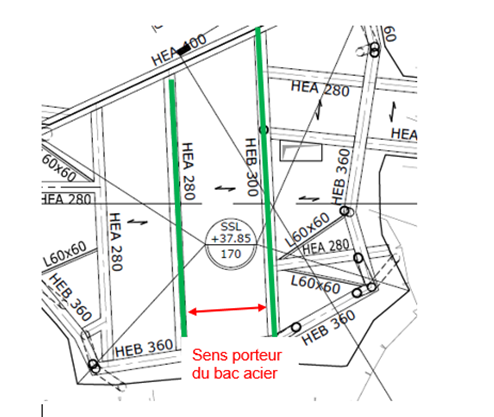
Vue en plan du plancher avec le sens porteurs des bacs acier
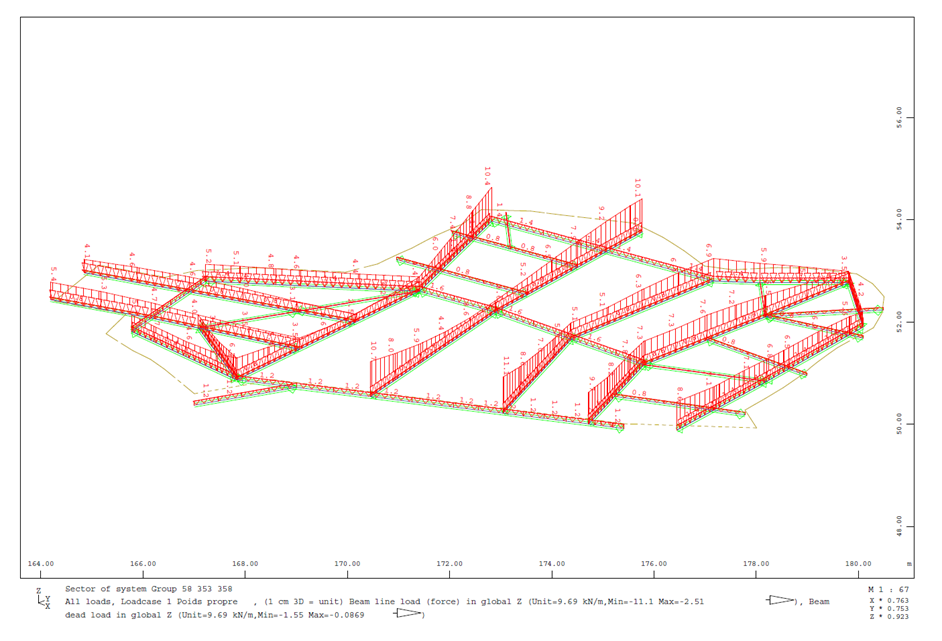
Visualisation des chargements des poutres calculés directement par le logiciel
Les calculs sont ensuite menés classiquement.
Le calcul des dalles en tant que tel se fait alors par un calcul spécifique de dalle (orthotrope) entre poutres.
C.8.4.2 Charges horizontales (vent, séisme)
Dans les cas usuels, la dalle en béton est désolidarisée des porteurs afin de ne pas participer au contreventement du plancher. Ce dernier est alors assuré par des contreventements horizontaux métalliques.
Mais dans certains cas complexes, il peut être nécessaire de contreventer les planchers en utilisant la dalle en béton. La modélisation devient alors très complexe :
-
la dalle doit être modélisée avec une excentricité par rapport à la fibre moyenne des profilés ;
-
il est nécessaire de modéliser les connecteurs entre la dalle et les profilés ;
-
le nœud de jonction dalle/poteau est différent du nœud de jonction profilés/poteau.
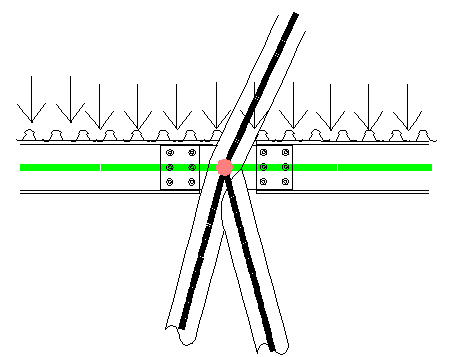
Plancher mixte sans modélisation de la dalle - Contreventement assuré par les profilés
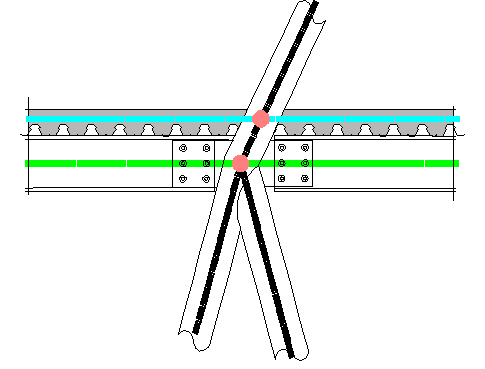
Contreventement assuré par la dalle
$translationBooksC.9 Matériaux
C.9 Matériaux
Le chapitre 4 de la partie 1 est dédié aux matériaux du génie civil et à leurs spécificités.
La définition des matériaux est une partie plutôt simple de la modélisation, car la plupart des logiciels ont des lois de matériau prédéfinies, suivant un ou plusieurs règlements.
Ces lois correspondent à une « courbe » simplifiée du comportement contraintes-déformations du matériau, considéré comme élastique et linéaire et intégrant des coefficients minorateurs de sécurité (sur le module et sur la résistance limite). Certains problèmes très particuliers peuvent nécessiter l’introduction d’une courbe plus complexe (loi de Sargin par exemple), ce que permettent, en principe, tous les logiciels.
En cas d’utilisation des lois prédéfinies, pour le béton, on veillera à bien intégrer le fait que le module d’Young de calcul est généralement par défaut le module à court terme. Pour les effets long terme, pour certains calculs thermiques et pour les calculs sismiques, il faudra penser à corriger le module. C’est valable également pour les calculs phasés où le module varie en fonction de l’âge du béton.
De la même manière, le logiciel prend un coefficient de Poisson par défaut. Généralement υ=0,2 pour le béton et υ=0,3 pour l’acier. Certains règlements demandent de prendre un coefficient υ=0 pour le béton à l’ELU. En particulier, voir le BAEL et le §3.1.3 (4) de l’Eurocode 2.
Pour tous les calculs en RDM qui nécessitent la prise en compte de la fissuration du béton (sismique, second ordre, dalles de ponts mixtes …), il faut tenir compte de la loi moment courbure de la section fissurée, qui représente l’affaiblissement de la section et la raideur réelle de la structure. Parfois, le code fournit des règles simples d'adaptation des inerties. Cela pourra nécessiter des calculs itératifs, d'abord en inertie non fissurée pour déterminer les zones de fissuration, puis avec prise en compte de l’inertie fissurée.
Il est à noter que certains logiciels permettent de prendre en compte directement une inertie fissurée.
$translationBooksC.10 Comportement spécifique au cisaillement et à la torsion
C.10 Comportement spécifique au cisaillement et à la torsion
De manière générale, il convient de noter que les modélisations filaires ne prennent pas systématiquement en compte les déformations d'effort tranchant, ni de manière appropriée les déformations de torsion.
Toutefois, dans le cas d'une modélisation d'une structure sensible sur ce point, il faut veiller à activer l'option de prise en compte des déformations d’effort tranchant et de torsion et à bien définir les sections réduites et inerties de torsion.
On peut noter également que les phénomènes de torsion gênée sont impossibles à modéliser en filaire, car les éléments poutres de RDM sont bâtis sur une hypothèse de conservation des sections droites (sans distorsion ni gauchissement) et pourtant, leur prise en compte conduit à des distribution de contraintes différentes de celles calculées en RDM “classique”.
La prise en compte de la torsion gênée demandera en général la modélisation séparée de tous les plaques constituant le profil mince de la section.
Quelques exemples de structures sensibles à ces phénomènes :
-
pour le tranchant : poutres PRS élancées (poutres de bipoutres mixtes, par exemple), structure de type console (voiles de contreventement avec un ratio hauteur/longueur faible). La non prise en compte de la déformation de tranchant aboutira, dans le premier cas, à des déformées sous-évaluées conduisant à une contreflèche erronée et, dans le second cas, à des raideurs sur-évaluées ;
-
pour la torsion : structures non libres de se distordre (en un ou plusieurs points).
Comparaison de calculs de l’angle de rotation d’une poutre en console en I
Données - poutre en console :
-
Conditions aux limites : encastrée en x=0 (θ=0, θ'=0) et libre en x=L (B=0, T=0)
-
Longueur : L = 1 m
-
Chargement : moment de torsion à l’extrémité x=L : Mx = 10 kN.m
-
Section : PRS ht = 200 mm, bt = 200 mm, tf = 20 mm, tw = 10 mm
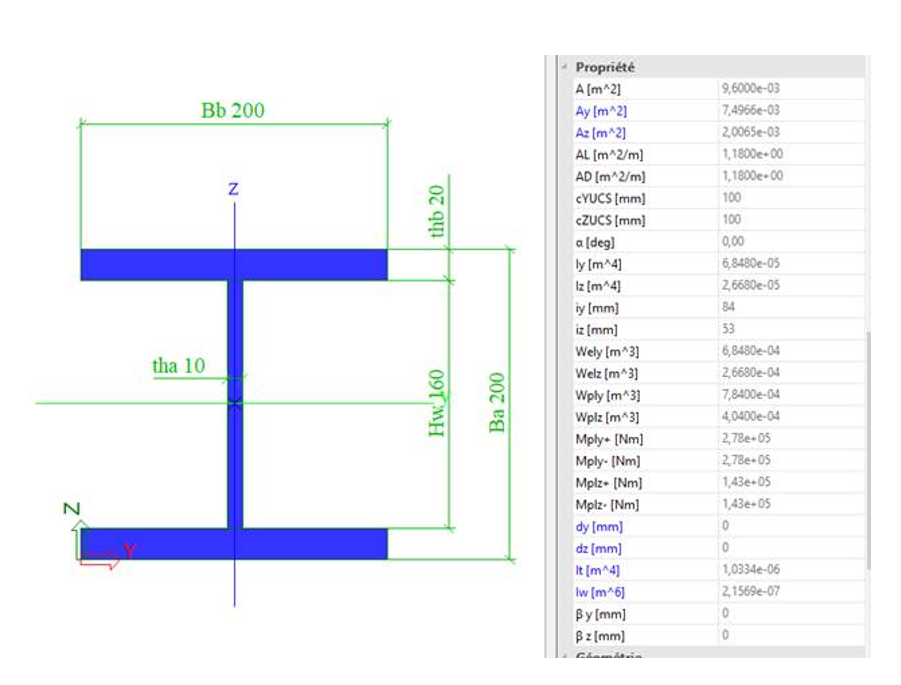
Modèle éléments plaques
Chargement :
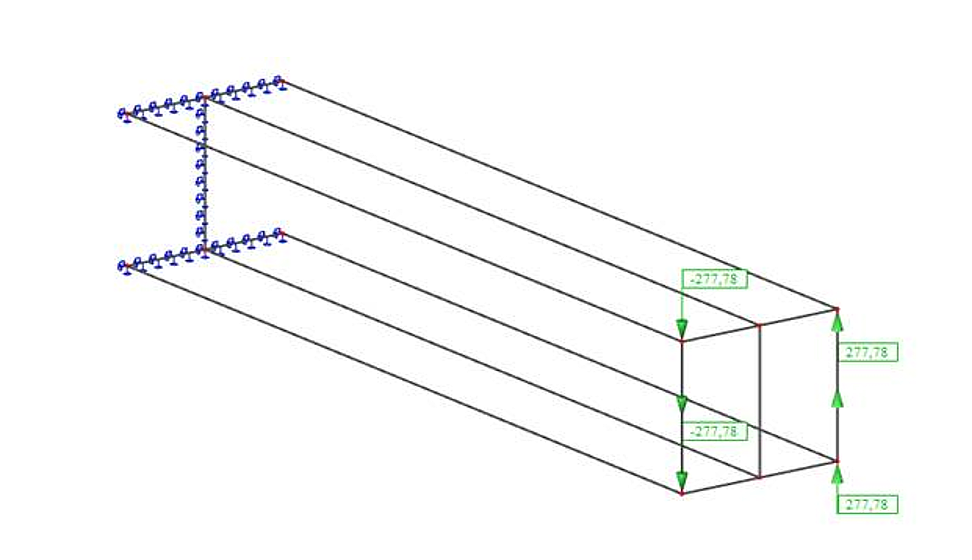
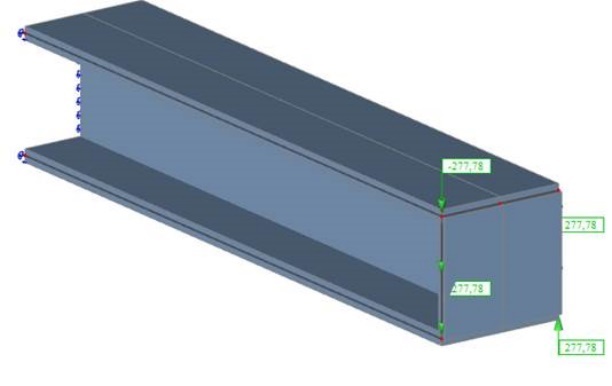
Résultante: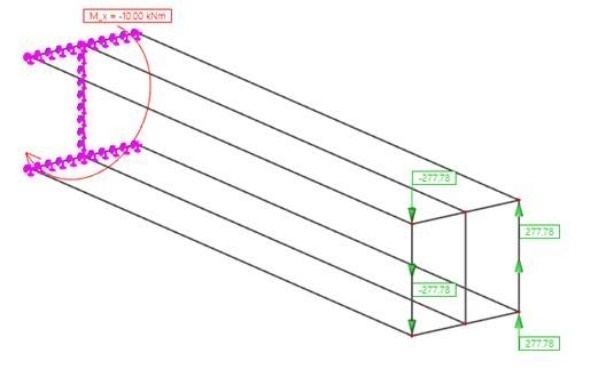
Déplacement θ(L)=0.042 rad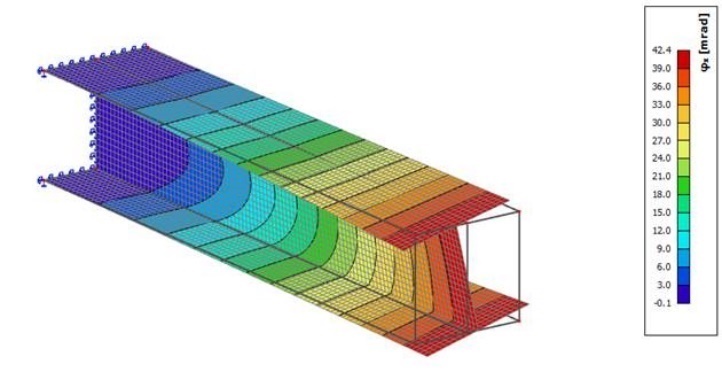
Modèle élément filaire
Chargement :
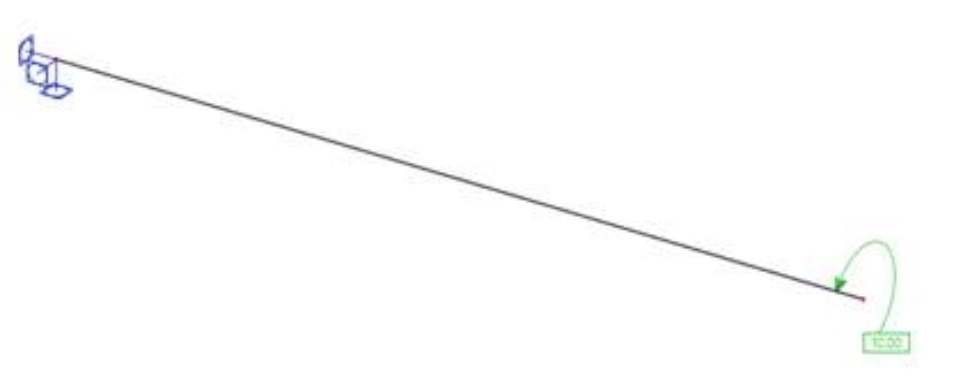
Résultante: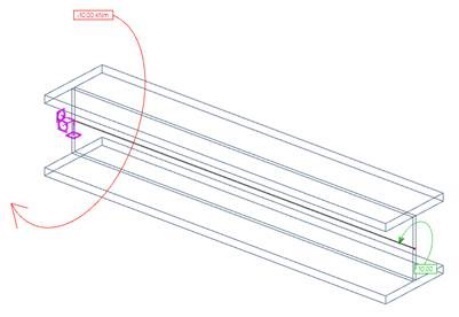
Déplacement θ(L)=0.1198 rad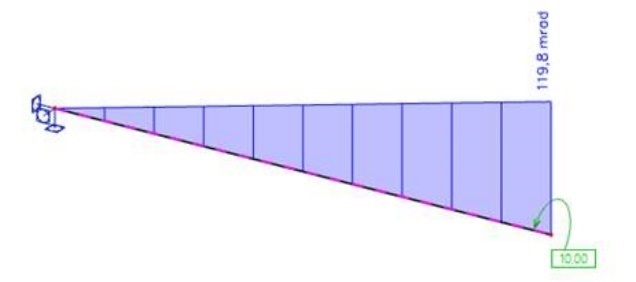
Calcul analytique
L’équation différentielle de l’angle de rotation est donnée par :
Avec les conditions aux limites donnée au paragraphe précédent, la solution de cette équation est :
Avec :
-
It : inertie de torsion de St Venant
-
Iω : inertie sectorielle
-
Mx : moment de torsion
-
L : longueur de la poutre
-
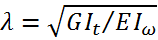
Application :
-
L = 1 m
-
G = 80 770 MPa
-
E = 210 000 MPa
-
 (calculé par le logiciel)
(calculé par le logiciel) -
 (calculé par le logiciel)
(calculé par le logiciel) -
Mx = 10 kN.m
-

![]()
Le calcul analytique et le modèle éléments surfaciques donnent le même résultat de rotation θ(L)=0.042 rad.
Le calcul de modèle élément filaire donne un résultat 2.85 fois supérieur.
Dans le modèle élément filaire , la raideur due à l’inertie de gauchissement n’est pas prise en compte pour le calcul de l’angle de rotation :
![]()
Conclusion
En règle générale, pour les modèles en élément filaire, les raideurs dues à la torsion d’une poutre en section ouverte ne sont pas bien prises en compte dans les calculs.
En cas de doute, une approche par éléments de type coque, sur un modèle simplifié, global ou local peut aider à cerner les effets.
$translationBooksC.11 Modélisation des charges
C.11 Modélisation des charges
Comme expliqué dans le chapitre E, il convient de toujours vérifier cas de charge par cas de charge (permanentes, d’exploitation et thermiques), par une somme manuelle des charges , le torseur global des charges : résultante en force mais aussi en moment. (Les logiciels dans leur grande majorité permettent de sortir le torseur global).
C.11.1 Penser aux cas de charge tests
Il est important, dès la modélisation achevée, de prévoir des cas de charges tests qui permettent de valider le bon comportement d’ensemble du modèle.
On pourra par exemple prévoir des forces unitaires uniformément reparties selon les 3 directions, des forces unitaires ponctuelles et en complément des variations de température. Et pour ces cas de charges, on examinera les déformées (ordres de grandeurs usuels en génie civil, discontinuités cinématiques ou de maillage, …) et les réactions d’appui (toutes forces supposées appliquées doivent se retrouver dans les réactions).
Ces tests permettent ainsi de vérifier les raideurs, les conditions aux limites et les liaisons internes. Ils permettent également ensuite de vérifier les cas de charge plus complexes (ordre de grandeur des effets).
C.11.2 Le cas du poids propre
La plupart des logiciels permettent de prendre en compte automatiquement un poids propre calculé à partir des sections des éléments et du poids volumique du matériau.
Cette méthode directe doit faire l’objet d’une vérification systématique. En particulier, les simplifications géométriques nécessaires à la modélisation peuvent induire un poids propre différent de celui calculé à partir des plans. Une approche manuelle rigoureuse des métrés ne devrait pas conduire à un écart supérieur à 5 %. Quoi qu’il en soit, tout écart doit toujours pouvoir être justifié.
Dès que les sections résistantes s’éloignent des sections brutes de la structure (par exemple en cas de prise en compte de la fissuration, du traînage de cisaillement ou de sur-épaisseurs sacrificielles), il convient de redéfinir le cas de charge Poids propre sans l’option automatique ou de redéfinir des caractéristiques de matériaux qui en tiennent compte, groupe d’éléments par groupe d’éléments.
C.11.3 Charges surfaciques et charges linéiques
Les charges surfaciques sont généralement appliquées sur la fibre moyenne de l’élément de plaque. Il faut tenir compte, dans l’intensité et le périmètre de cette charge surfacique, de la diffusion des charges jusqu’à la fibre moyenne, en intégrant l’éventuelle diffusion au travers de l’épaisseur du revêtement.
Par ailleurs, il faut vérifier si la charge surfacique est appliquée suivant la normale à l’élément (repère local) ou selon le repère général du modèle.
Certaines charges (neige par ex.) sont définies par rapport à une surface de référence (l’horizontale pour la neige), il convient donc d’en tenir compte dans l’application à des surfaces non parallèles à ce plan de référence (cas de la toiture inclinée pour la neige). Souvent dans les logiciels, il faut préciser explicitement si une charge est projetée ou non.
D’autres types de charges (vent, pression hydraulique, …) sont quant à elles toujours perpendiculaires aux surfaces.
Enfin, on vérifiera toujours l’orientation des charges et comme pour le poids propre, les déformations et les réactions d’appui.
Voir les exemples ci-dessous.
Exemple de la buse avec chargement de la poussée des terres
Problématique : modéliser une charge linéique, sur une surface inclinée.
Les logiciels proposent des options lors de la définition du chargement, qui ne sont parfois pas très explicites.
Cas 1 : Charge définie dans le repère global utilisateur
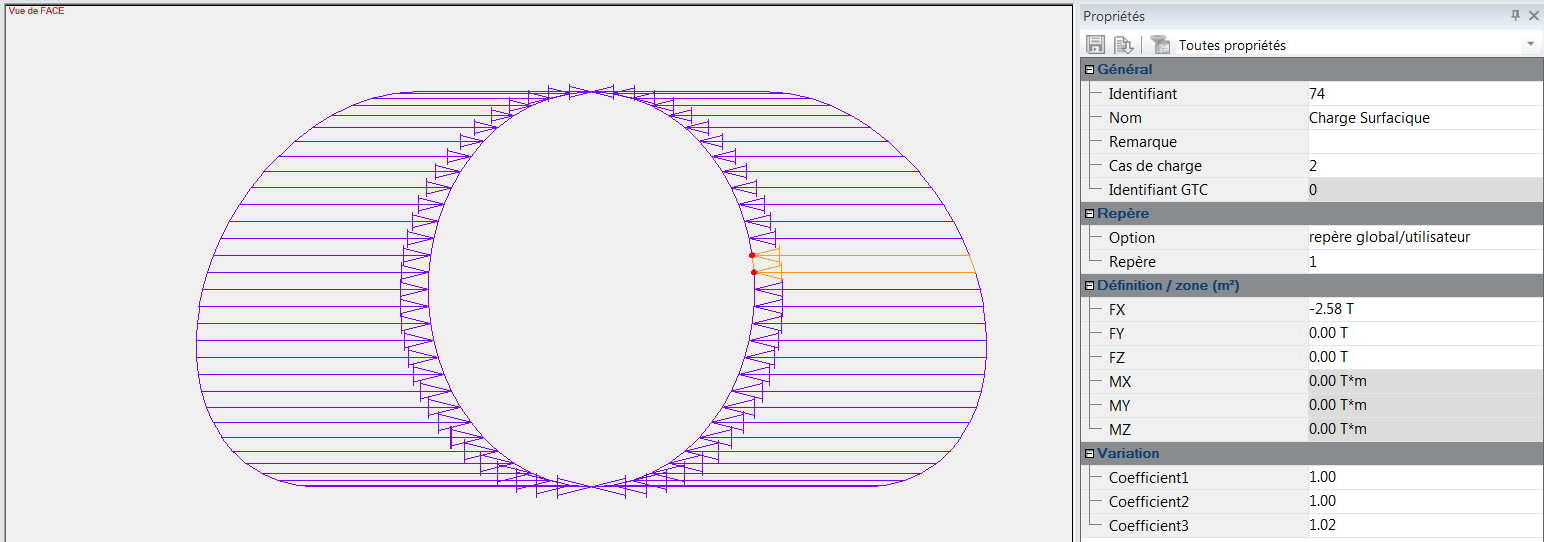
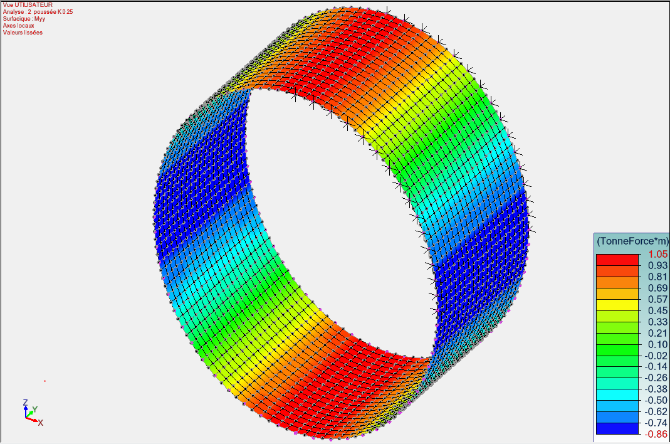
La charge introduite sur la barre, est définie comme une charge horizontale au mètre linéaire de l’élément.
Cas 2 : Charge définie dans le repère projeté
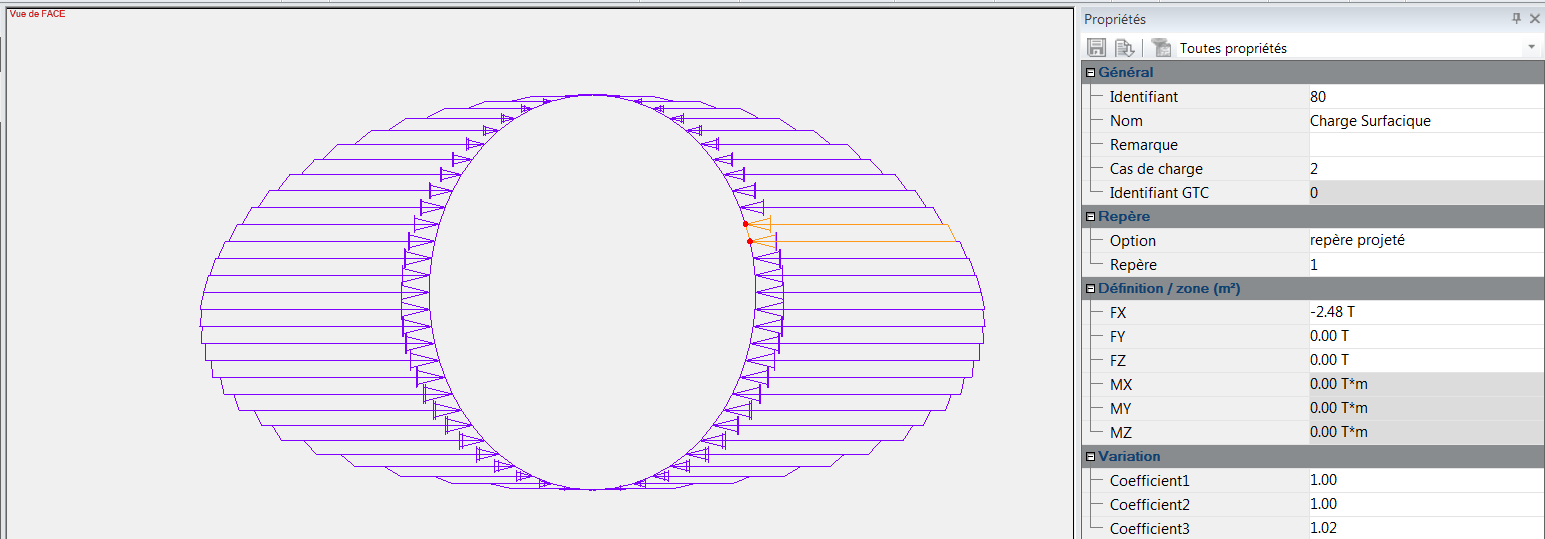
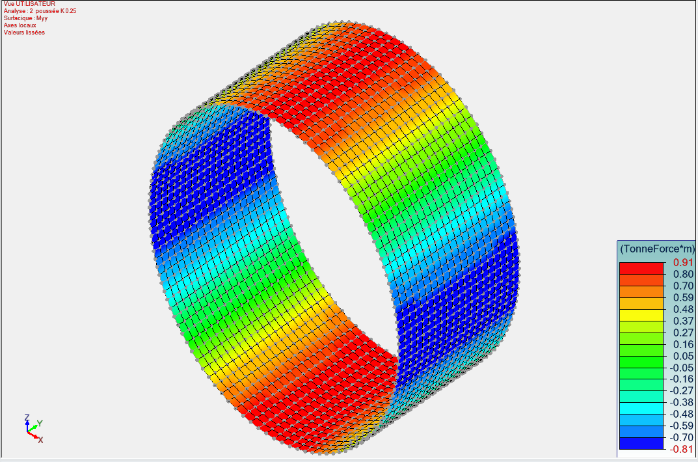
La charge introduite sur la barre, est définie comme une charge horizontale au mètre linéaire mesuré perpendiculairement à l’action de la charge (une verticale dans le cas présent).
Conseil : Toujours vérifier, sur un exemple simple, que l’option utilisée correspond bien à la modélisation de chargement souhaitée.
Les charges linéaires sont également concernées par ces problèmes de diffusion et de repère.
Nota : dans le cas d’une poussée des terres, la modélisation à utiliser est la seconde, à savoir une projection des charges sur un plan vertical.
C.11.4 Charges thermiques
Les charges thermiques sont constituées de deux types de charges :
-
Les variations linéaires dont un cas particulier très courant est la variation uniforme,
-
Les gradients de températures qui proviennent d’une différence de température entre les surfaces extrêmes d’une structure.
Il est indispensable d’utiliser des cas test pour vérifier la prise en compte correcte des phénomènes thermiques en cohérence avec le bridage de la structure.
Il est à noter que les charges thermiques ne créent des efforts (ou des contraintes) uniquement si la structure n’est pas libre de se déformer (bridages, structures hyperstatiques, …)
La fissuration du béton peut jouer un rôle important dans la distribution des efforts (voir 11.5 ci-après).
C.11.5 Modélisation du retrait et du fluage
A défaut d’une option spécifique du logiciel, la modélisation du retrait du béton peut être réalisée par l’application de cas de charge thermique équivalents.
La modélisation du fluage peut être réalisée par des cas de charges thermiques ou réduction du module élastique des matériaux.
Il convient de bien vérifier que les déformations imposées sont conformes au phénomène attendu.
En cas de doute, il est toujours possible de réaliser des calculs en fourchette, pour encadrer le court et le long terme (cas des ponts mixtes, des fondations, …)
Description détaillée: modélisation du retrait dans les ponts mixtes
Lien vers la modélisation du retrait dans les ponts mixtes
C.11.6 Charges mobiles
La compréhension du concept de ligne d’influence est fondamentale pour la bonne appréhension des positionnements des convois et permet d’éviter la constitution de cas de charges trop nombreux.
Dans le cas d’ouvrages complexes, le concept n’est pas facilement applicable, néanmoins on peut toujours générer des lignes d’influence en plaçant des forces unitaires aux différents nœuds de la structure. Les résultats, une fois post-traités, avec un tableur par exemple, permettent alors de placer les charges tant surfaciques que mobiles pour produire l’effet le plus défavorable.
Les règlements définissent très fréquemment des modèles de charges qui combinent des charges de différentes natures avec des règles de concomitance et de configurations géométriques précises. Il convient de les lire attentivement et intégralement. Ceci permettant alors grâce aux lignes d’influence de positionner les charges à la position défavorable pour l’effet étudié (flèches, efforts, …).
Chargements suivant les lignes d’influence.
Cas des charges réparties sécables et des convois avec espacement variable des véhicules
A notre connaissance, tous les règlements imposent de charger les structures suivant les lignes d’influence. Les pratiques métier ou la phase dans laquelle se trouve le projet (EP, AVP, voire PRO) peuvent conduire à des simplifications : chargement de deux travées contigües, chargement de travées complètes en alternance (« une sur deux ») …
Dans le cas des ouvrages d’art, et en particulier pour les calculs d’Exécution, le chargement par lignes d’influence est obligatoire, et on ne peut pas se contenter de charger des travées complètes ou de faire circuler des convois à touche-touche.
Il convient donc de s’assurer que le logiciel utilisé est bien capable d’effectuer des calculs suivant les lignes d’influence (LI), c’est-à-dire d’adapter les longueurs chargées ou d’adapter le nombre et l’espacement des véhicules d’un convoi pour obtenir la situation la plus défavorable, pour un effet recherché, par exemple le moment, la réaction d’appui ou encore une déformée, …
1) Charges de type UDL de l’Eurocode. Nous recherchons l’effort tranchant maximal (i.e. en valeur positive ou négative) à mi-travée d’un pont à deux travées égales (2×25 m) et de section constante. Nous savons que la ligne d’influence de l’effort tranchant à mi-travée a l’allure suivante :
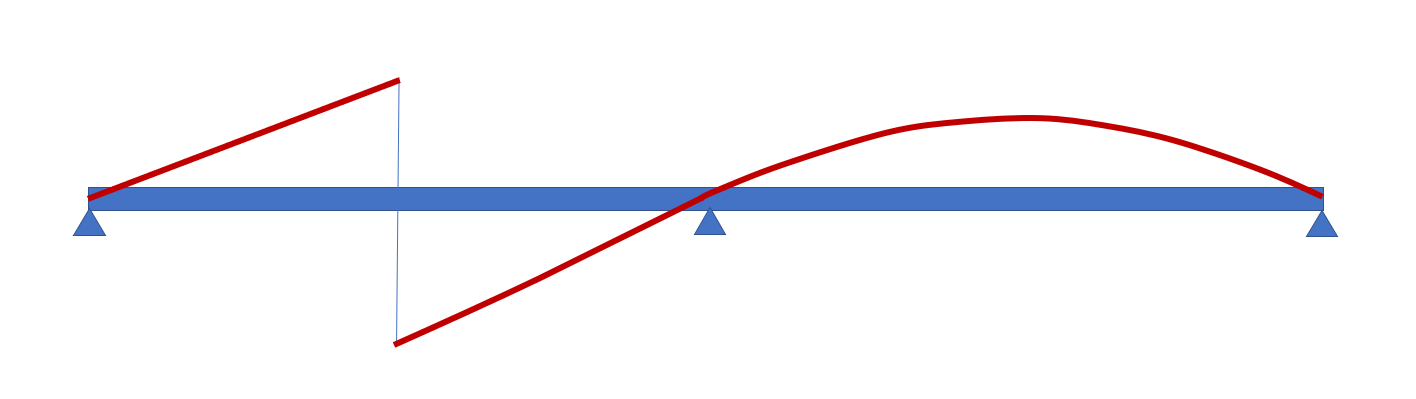
A défaut de mieux, on pourrait être tenté de charger une ou deux travées complètes.
Le diagramme ci-après montre, pour une charge unitaire de 10 kN/m, l’enveloppe des tranchants pour les cas :
-
Travée 1 chargée

-
Travée 2 chargée

-
Travées 1+2 chargées

A mi-travée 1, on obtient |V|max = 31.3 kN :
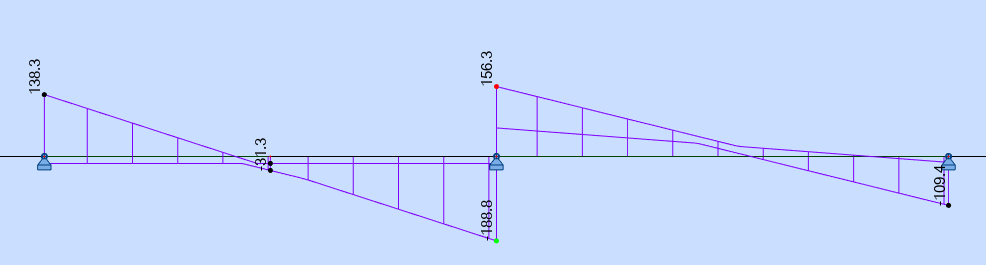
Le diagramme ci-après montre le même diagramme de tranchant, mais avec une poutre chargée suivant les LI :
-
Zone LI courbe supérieure
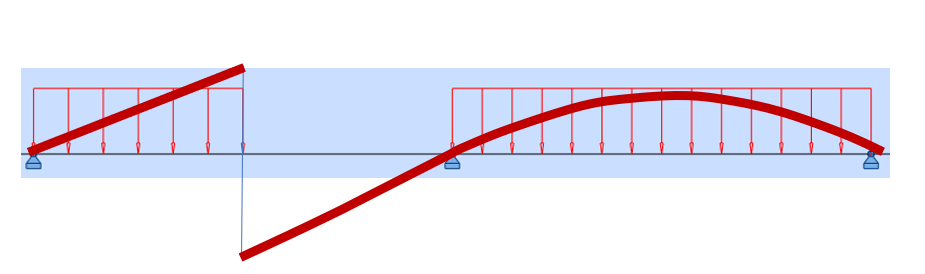
-
Zone LI courbe inférieure
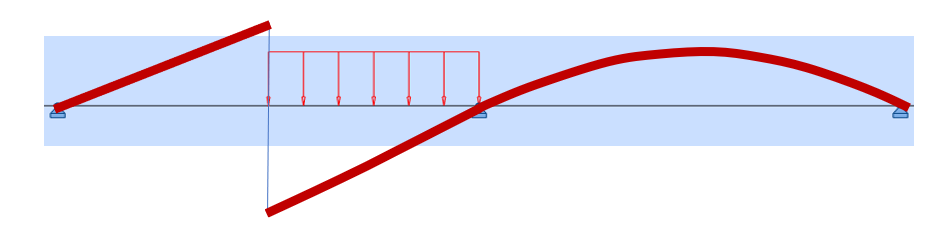
On obtient |V|max = 53.7 kN, soit un écart relatif conséquent.
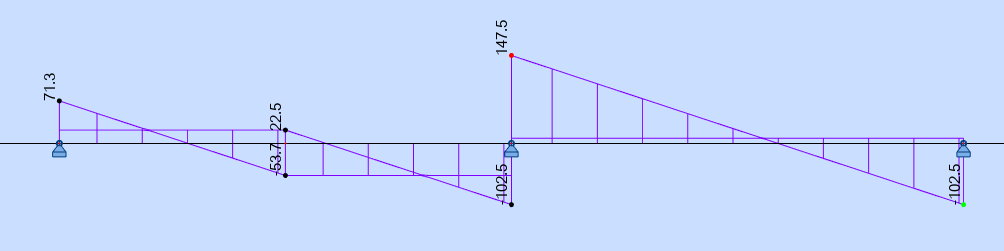
On pourrait répéter l’exercice pour toutes les sections.
Ceci était encore plus vrai pour les charges du fascicule 61 titre II, que nous sommes encore amenés à utiliser, lors de recalculs par exemple, il s’agit notamment :
-
Des charges réparties A(L) similaires à UDL, mais qui possèdent en plus la propriété de varier en intensité suivant la longueur chargée L,
-
Les convois B ou Mc, dont l’espacement peut varier, avec parfois une distance minimale à respecter. Le convoi Bc est décrit ci-après.
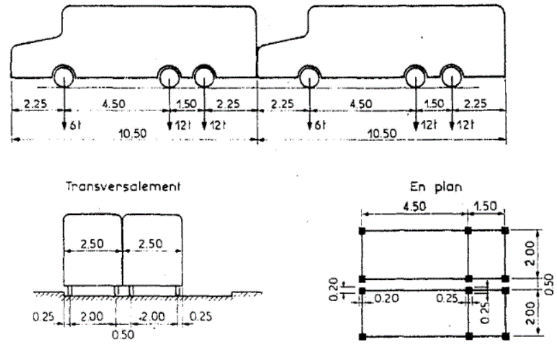
2) Illustration sur le pont précédent pour le cas du convoi Bc pour le moment sur appui
La ligne d’influence du moment sur appui a l’allure suivante :
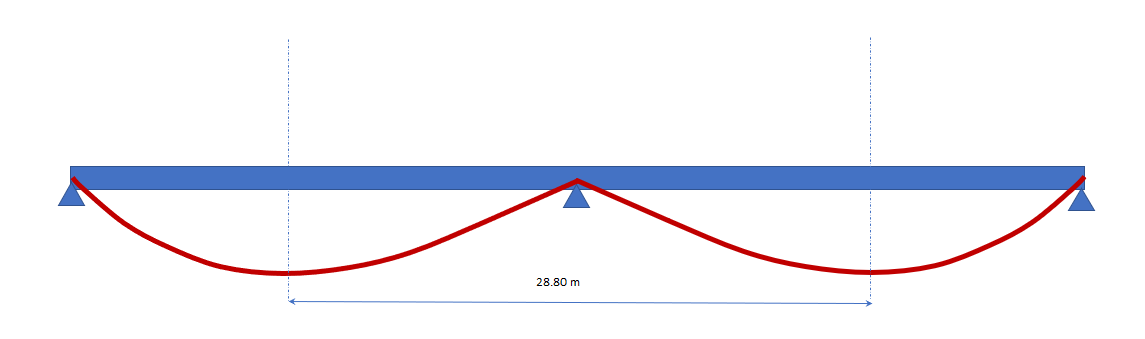
Une étude fine serait à réaliser pour trouver la position précise des camions, mais on se rend immédiatement compte (ici pour des travées de 25 m - rappel) que les camions doivent être séparés pour obtenir un effet maximal :
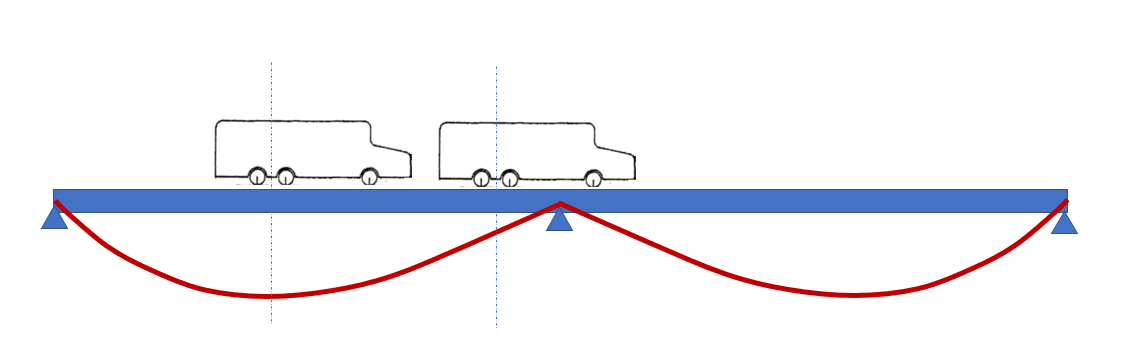
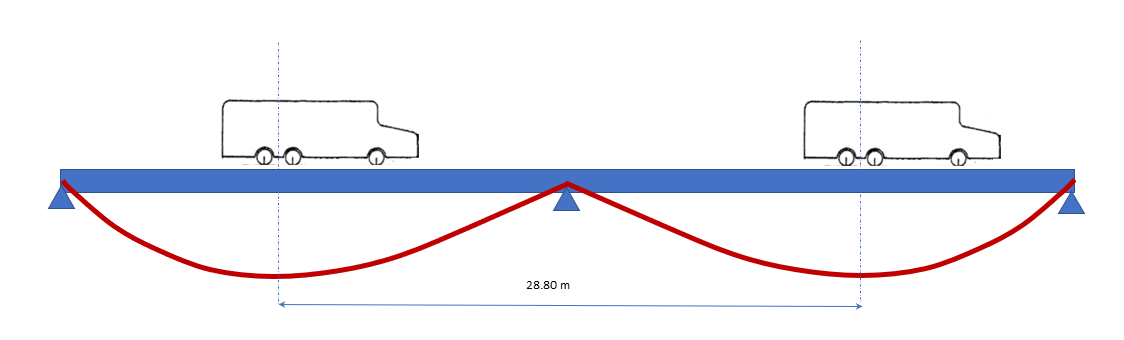
Application : nous faisons circuler sur le pont deux convois, le premier, avec les deux camions à touche-touche, comme dessiné dans le règlement, et le second, avec une distance de 28.80 m environ (déterminé graphiquement).
Les résultats :
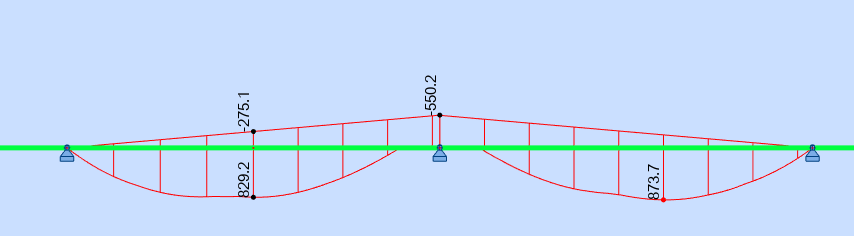
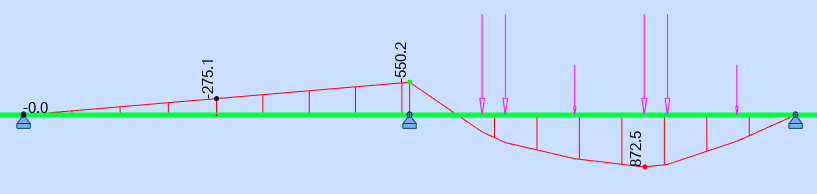
Camions à touche-touche, enveloppe et position défavorable.
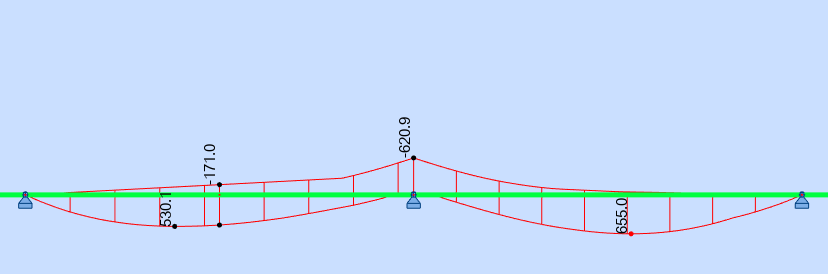
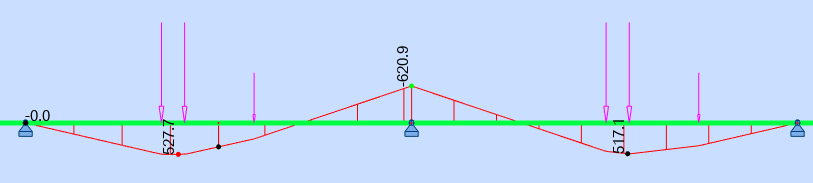
Camions séparés, enveloppe et position défavorable.
L’écart sur les moments sur appui est de l’ordre de 13%. A contrario, bien évidemment, le cas de charge utilisé pour obtenir le moment sur appui maximal n’est pas celui à utiliser pour les travées.
De manière pratique, on se rend rapidement compte que la détermination des longueurs chargées et/ou positions et espacements de convois, pour toutes les sections et pour toutes les valeurs d’intérêt, est une tâche titanesque à la main, et que l’aide du logiciel est indispensable – encore une fois pour des calculs de niveau EXE. Pour les autres phases, des calculs simplifiés, en conservant une certaine marge sur les justifications et les quantités reste possible, notamment en étudiant certaines sections judicieusement choisies sur l’ouvrage, mais ceci sort du cadre du présent document.
Ensemble des cas de charges et résultats pour les charges réparties. Travée 1, travée 2 et travées 1+2 :

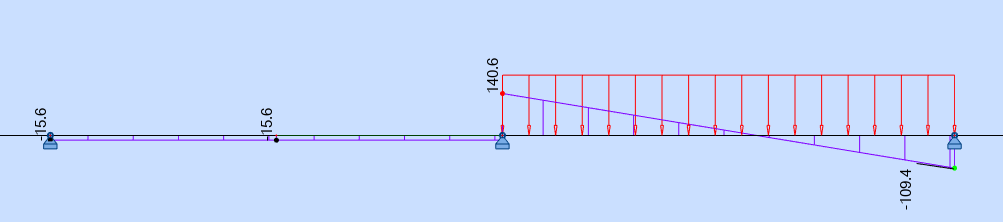
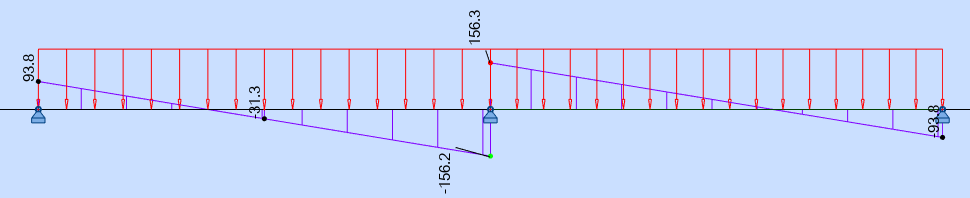
Chargements suivant Li :


C.11.7 Modélisation de la poussée et butée des terres
De manière générale, les actions générées par les sols (la poussée par exemple), les pressions d’eau ou encore les actions sismiques sont modélisées par des charges. Les réactions (pressions sur le sol, pouvant aller jusqu’à un seuil plastique, la butée, …) sont, elles, représentées par des ressorts linéaires ou non.
Les approches sismiques linéaires sont admises tant que le soulèvement des fondations est limité à 30% de la surface de ces dernières. Piège : on n’applique pas de forces de réactions sur une face bloquée par des ressorts… on laisse les ressorts faire le travail.
Nota : une approche en déplacements est également possible pour modéliser les charges de poussée et peut conduire à réduire les efforts globaux (cf. Guide AFPS / AFTES . GUIDE “Conception et protection parasismiques des ouvrages souterrains »).
$translationBooksC.12 Compléments liés aux éléments volumiques
C.12 Compléments liés aux éléments volumiques
Les principes énoncés pour les modélisations en 2D restent applicables en 3D, en particulier l’utilisation d’éléments isoparamétriques (parallélépipèdes plutôt que tétraèdres) est préférable, ce qui nécessite un lourd et rigoureux travail de préparation de la géométrie de base.
Les mailleurs automatiques sont à utiliser avec parcimonie.
Exemple d'un tablier de pont à poutres modélisé en EF volumiques:
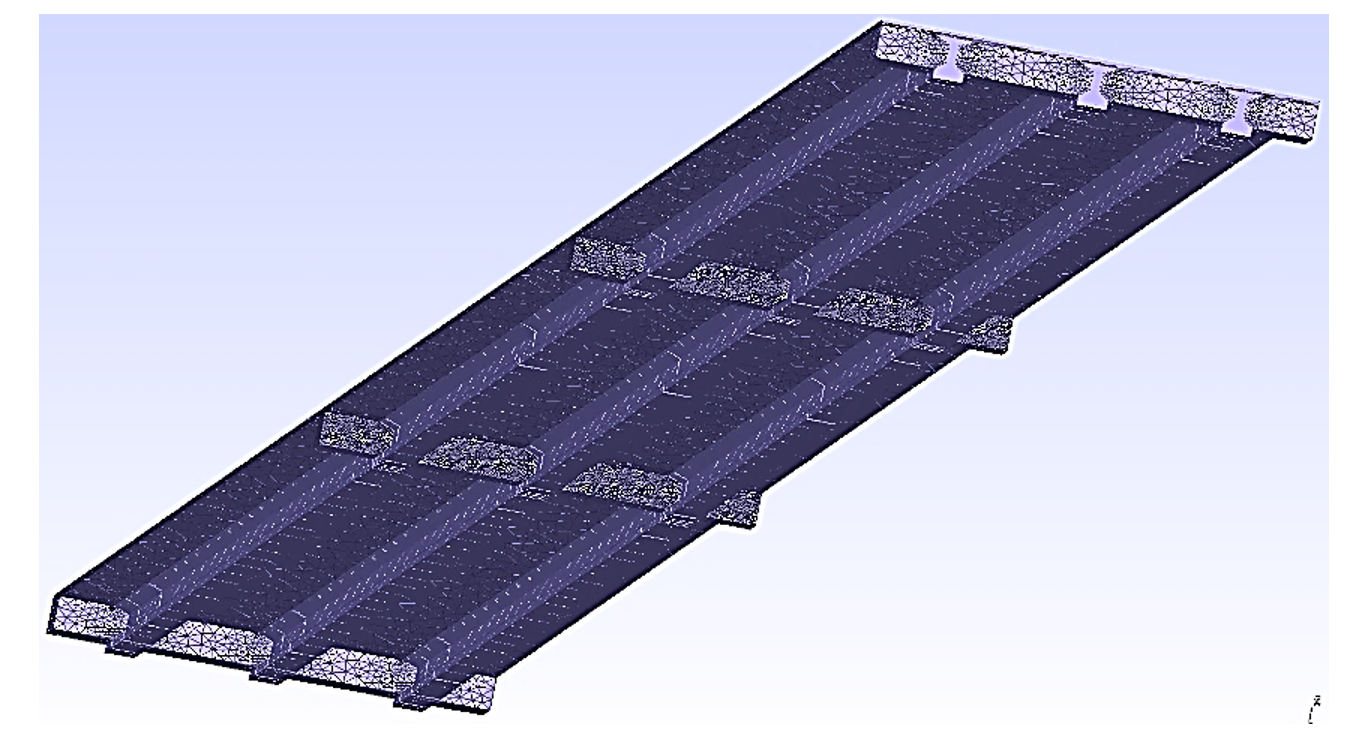
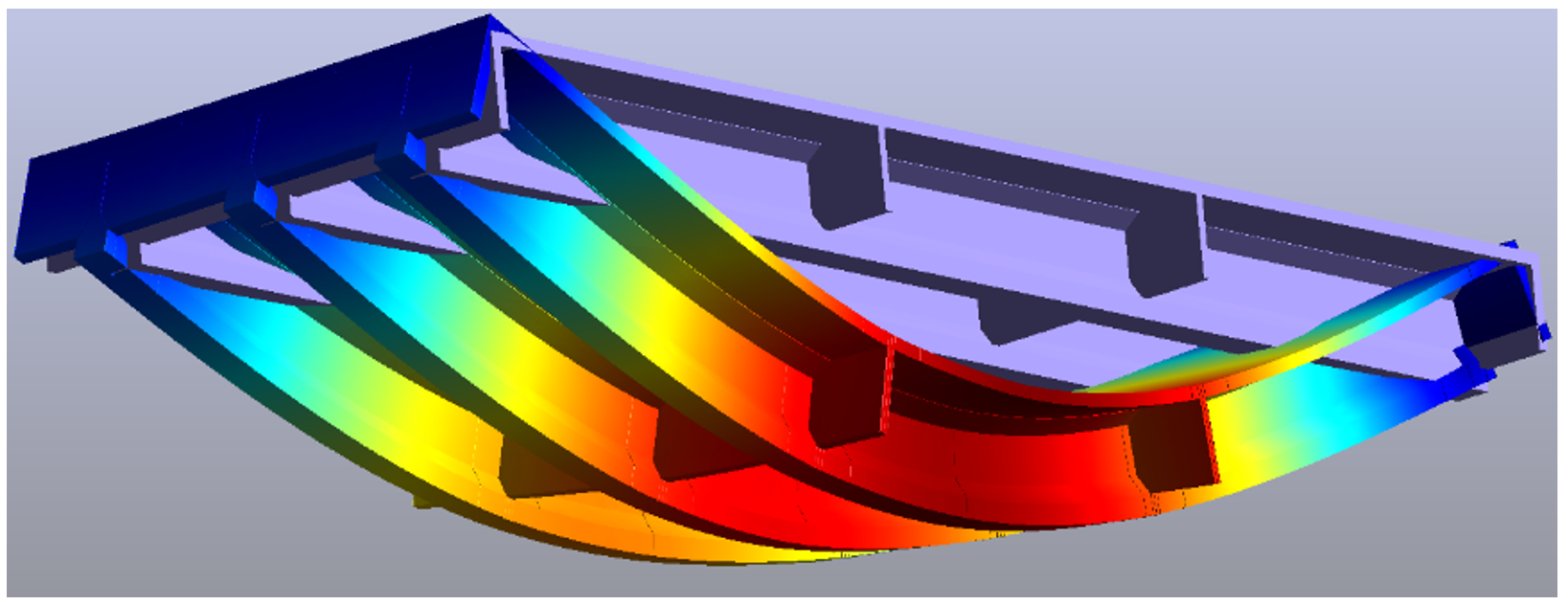
(Tiré de la Partie 3 - Exemple C - Modélisation de grillages de poutres).
$translationBooksC.13 Compléments liés aux calculs non linéaires
C.13 Compléments liés aux calculs non linéaires
Le présent paragraphe traite à la fois des non-linéarités liées aux lois des matériaux et des non-linéarités dites géométriques.
Il est fréquent d'associer les calculs non-linéaires à des structures complexes telles que les ponts à haubans et suspendus, pourtant ce sujet apparaît dans le quotidien de tout ingénieur structures, par exemple en cas :
-
de décollement partiel de semelles de fondations ;
-
d'incapacité de certaines barres à reprendre des compressions (voir le § C.2.7 sur les contreventements) ;
-
d'un calcul de flambement en béton armé ;
-
de cas de sortie du champs de la théorie des poutres (par exemple, le calcul des contraintes dans un contreventement de pont sous son poids propre).
De manière générale, pour tous les calculs non-linéaires, il est important d’effectuer un calcul linéaire avant de prendre en compte la non-linéarité pour comprendre le fonctionnement de la structure et l’effet spécifique de la non-linéarité.
C.13.1 Géométrie théorique et imperfections
La plupart des règlements imposent que les calculs non linéaires intègrent un défaut initial de forme ou d’implantation des éléments. Certains logiciels peuvent intégrer directement ce défaut. Pour d’autres, il faudra soit appliquer un cas de charge qui crée le défaut initial, soit définir la géométrie avec le défaut.
On peut noter que dans un calcul aux éléments finis, le recours à des éléments triangulaires permet toujours de tenir compte de la prédéformation d'une surface plane.
C.13.2 Haubans et câbles
Les haubans et câbles sont des éléments par essence non-linéaires, du fait de leur fonctionnement en traction seule et de l'effet de chaînette qui impose la prise en compte d'un module d'Young “apparent”. Ce module est fonction de la tension, de la longueur, de la masse volumique et du module d'Young brut du câble.
Pour les haubans, pour des phases amont de projet, il n’est pas toujours indispensable de prendre en compte ces deux effets ; on pourra alors modéliser le hauban par une barre, idéalement bi-articulée, en prenant soin de négliger le poids propre de la barre ou de l’appliquer directement manuellement aux extrémités. On vérifiera dans l’analyse des résultats que ces barres ne sont pas comprimées.
C.13.3 Zones de non-linéarité matériau
Un premier calcul linéaire permet de repérer les zones où l’on autorisera le comportement non linéaire. Le calcul se poursuivra par itérations successives en intégrant progressivement les non-linéarités.
C.13.4 Flambement et calculs en grands déplacements
-
Flambement - calcul des coefficients critiques
La plupart des logiciels sont capables de déterminer les charges critiques de flambement des barres comprimées (donc les longueurs de flambement des barres composant une structure) à partir d'un calcul modal, en petits, voire en grands déplacements. Il convient d'effectuer les calculs pour chaque combinaison dimensionnante. Un bon nombre de logiciels permettent également d'effectuer les vérifications normatives à partir de ce calcul des charges critiques (ou simplement via une introduction manuelle des longueurs de flambement).
Le calcul des coefficients critiques est basé sur la recherche des valeurs αi telles que le déterminant Det([Ko]+αi [Kσ])=0, où Ko est est la matrice de rigidité associée aux petits déplacements et [Kσ] la matrice de rigidité associée aux contraintes initiales.
L'objet n'est pas ici de développer toutes les possibilités offertes par les logiciels, mais d'insister (encore une fois) sur le fait qu'il convient de bien comprendre ce que fait son logiciel et quelle est l'incidence de la modification des paramètres de calcul. Un paramètre simple peut être tout simplement la subdivision nécessaire des barres pour obtenir les bons résultats, comme illustré dans l'exemple ci-après.
Illustration sur le portique contreventé du Chapitre C.2. Lien vers l'exemple du calcul des coefficients critiques de flambement.
Ce petit exemple confirme qu’il convient de maîtriser ce que fait l’outil et que, dès lors que l’on sort d’un calcul simple (calcul élastique linéaire, au premier ordre), il faut toujours se recaler sur des exemples simples et traités dans la littérature, par exemple.
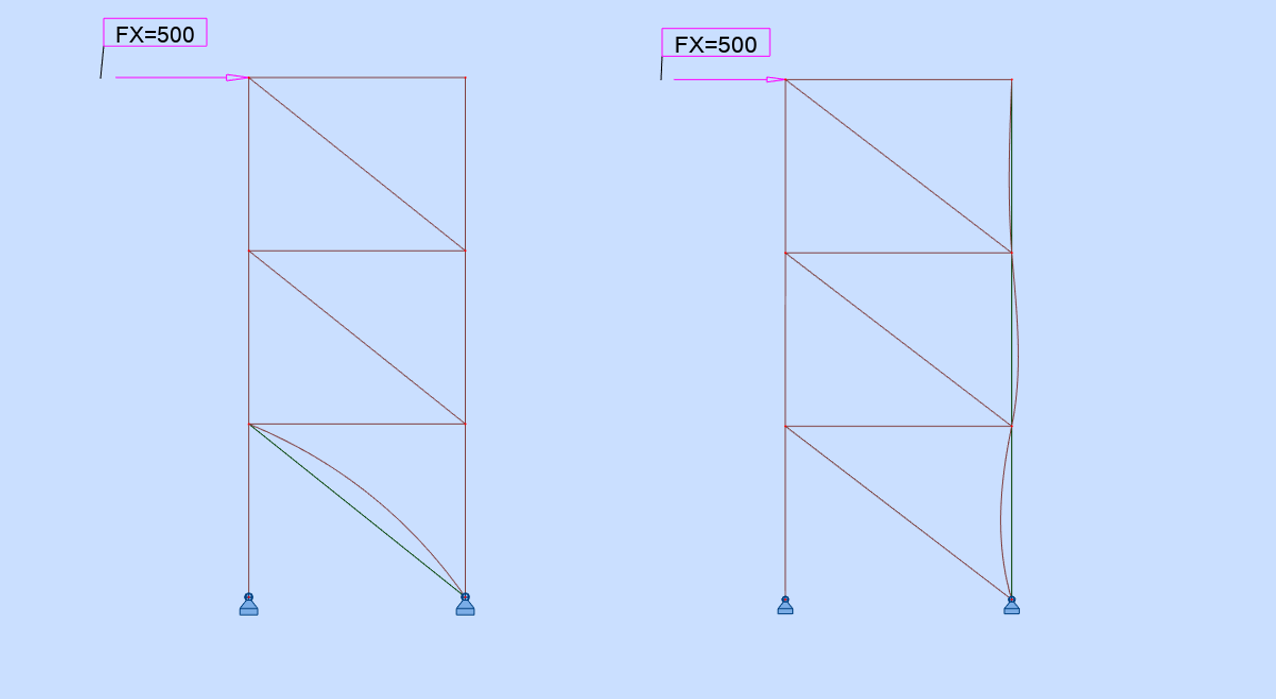
Déformées modales
-
Calculs en grands déplacements:
Ces calculs nécessitent la mise à jour des matrices de rigidité à chaque itération, que l'on soit en béton armé ou en métal. Ce qui est dit pour le calcul des coefficients critiques de flambement ci-avant quant à la maîtrise des paramètres du logiciel, reste parfaitement applicable.
Nous renvoyons à deux articles intéressants sur le sujet:
- Calcul au flambement des arcs - Comparaison entre un calcul approché et un calcul en grands déplacements du Bulletin Ouvrages d'art n°32“ - Lien vers l'article.
- Instabilité par flambement des arcs (CTICM) - Lien vers l'article.
$translationBooksC.14 Compléments liés au béton précontraint
C.14 Compléments liés au béton précontraint
La modélisation fine de la précontrainte nécessite l’utilisation d’un logiciel spécifique gérant les tracés des câbles, le calcul des tensions (calcul des pertes) et la prise en compte de phasages datés et des lois de fluage.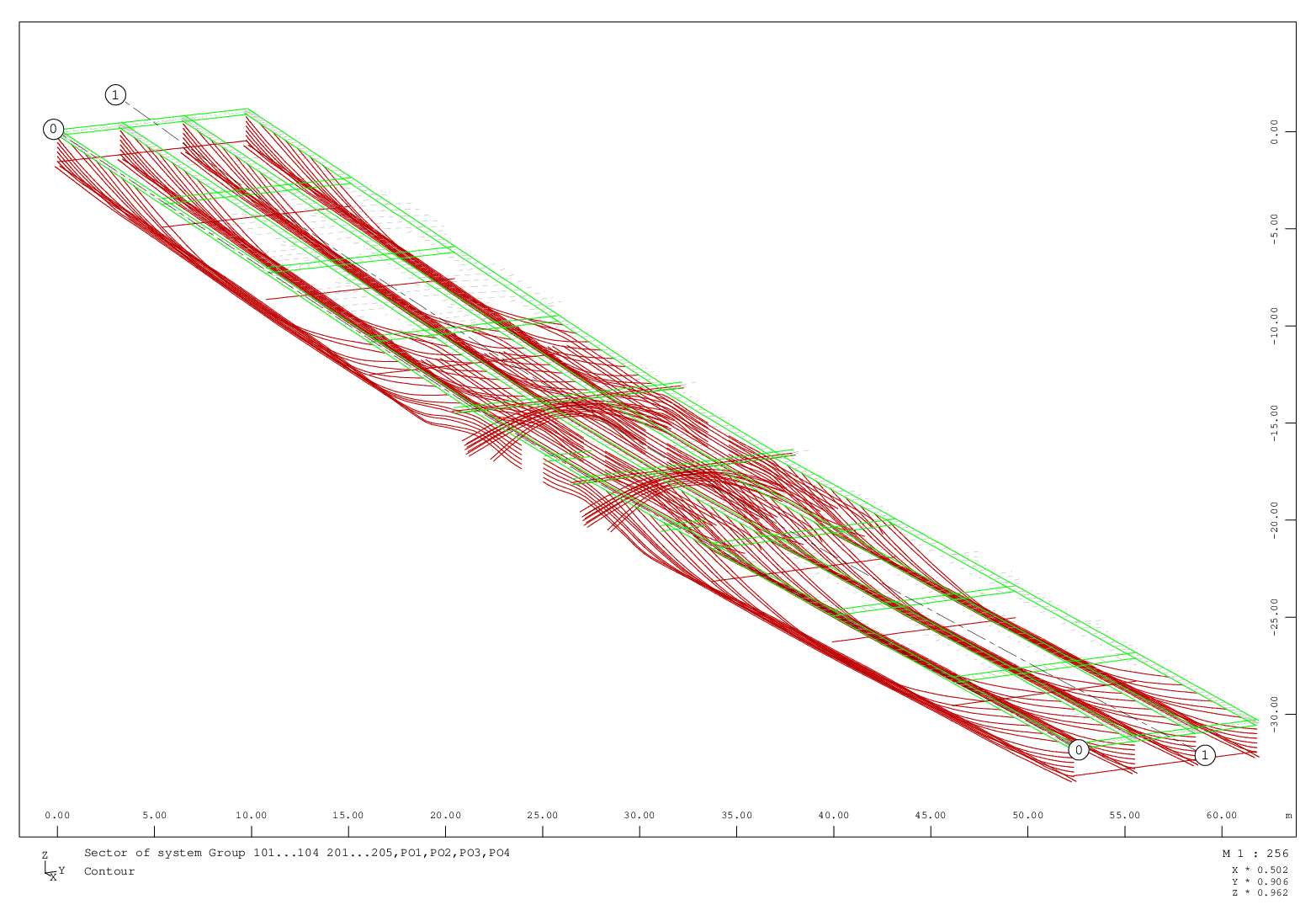 Exemple de câblage complexe
Exemple de câblage complexe
Il est cependant toujours possible, par exemple pour effectuer un calcul de prédimensionnement ou de vérification d’un calcul complexe, de modéliser la précontrainte de manière simplifiée.
Les poutres (et coques) doivent être décrites au niveau de leur centre de gravité pour garantir le bon positionnement des câbles dans la section.
Les deux sous-sections suivantes présentent la modélisation simplifiée d’un câble intérieur au béton puis d’un câble extérieur. Elle suppose la connaissance d’un tracé a priori et une tension constante dans le câble (après pertes instantanées ou à long terme, par exemple). Il est utile de préciser que la modélisation des pertes de précontrainte se ferait suivant la même logique mais avec un signe opposé à l’action de la précontrainte initiale.
C.14.1 Câble intérieur au béton

La méthode des forces externes permet d’appréhender les effets des câbles, en les modélisant comme des forces concentrées aux abouts et par des pressions (poussées) le long du câble.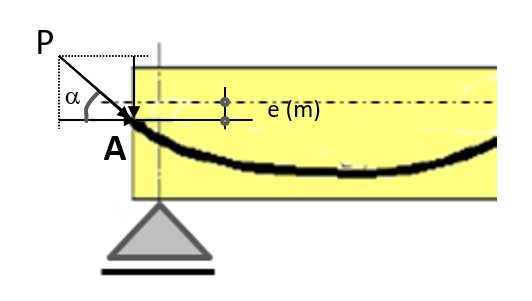
Ancrages d’abouts ou ancrages noyés, nous aurons :
-
un effort horizontal HA = P.cos(α)
-
un effort vertical VA = P.sin(α)
-
un moment MA = HA.e
(avec la convention de signes adaptée au logiciel)
Le long de la poutre, un câble exerce des poussées radiales, que l’on peut, dans le cas général, supposer verticales. Elles valent pi≈P/Ri. Il s’agit de la poussée au plein des câbles. Elles s’appliquent comme des charges réparties classiques.
Les segments rectilignes ne produisent pas de poussée (R=∞).
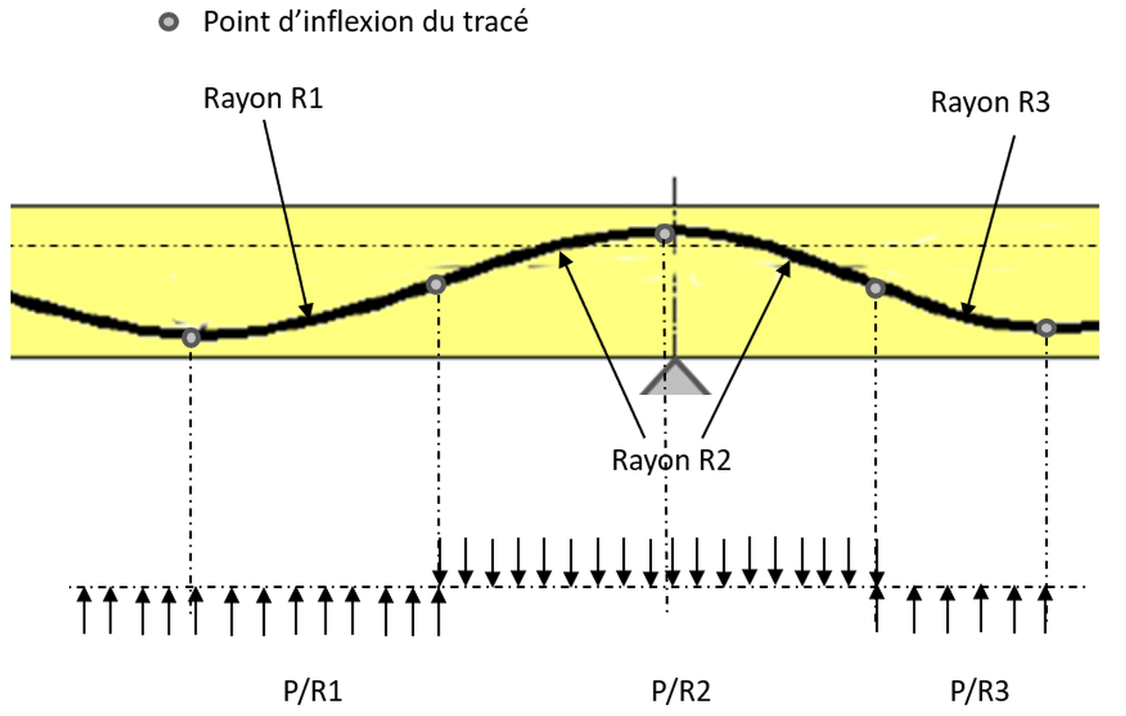
On confond fréquemment HA et P, cos(α) étant souvent proche de 1.00.
Exemple de définition manuelle simplifiée d'un câble.
La poutre comprend deux travées de 25 m. La section est symétrique et a une hauteur de 1.25 m (pour fixer les limites du câble).
Données d'entrées du câble.
On vérifie que le câble reste dans la poutre (la limite est fixée à 10 cm des faces supérieures et inférieures pour ce cas d'école) et que les raccords aux points d'inflexions ont bien la même pente.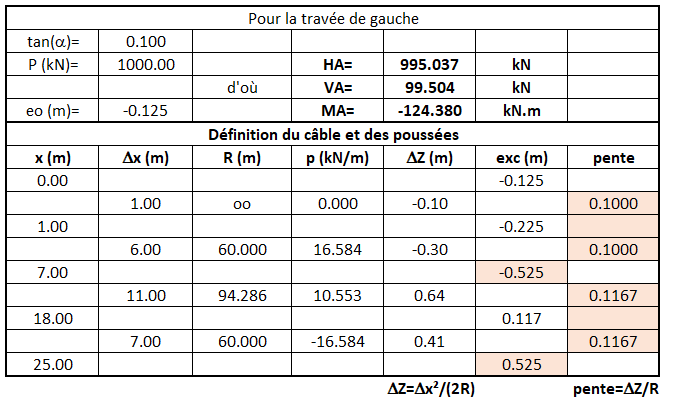
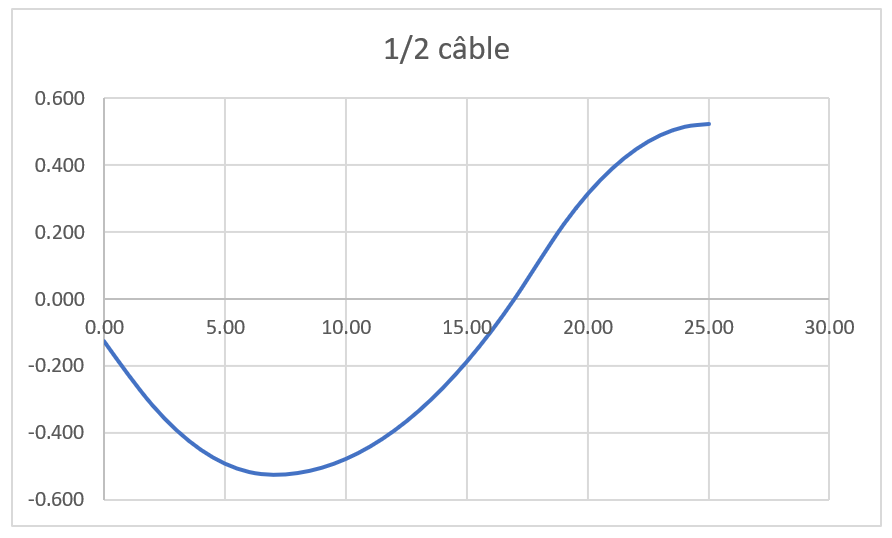
Traduit en chargement sur la poutre:
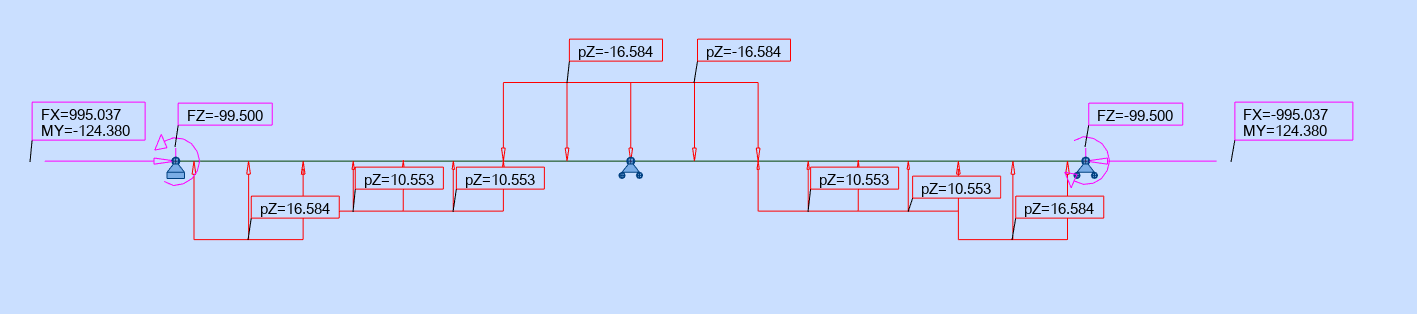
L'effort tranchant résultant, i.e. qui tient compte de l'hyperstaticité du système:
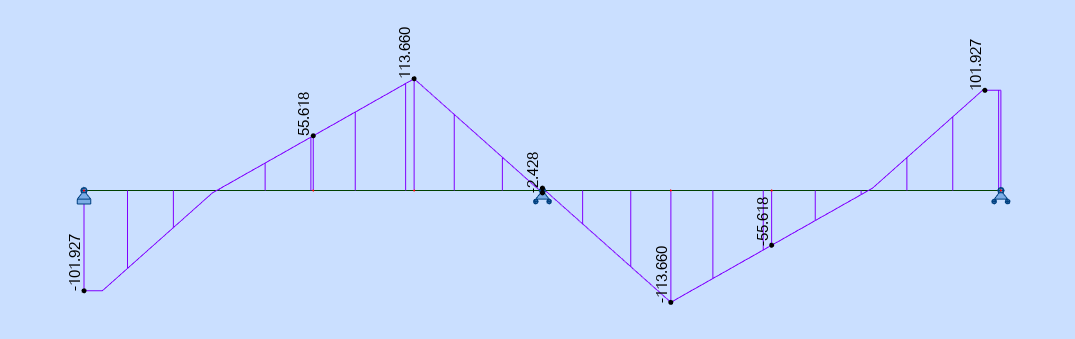
Le moment:
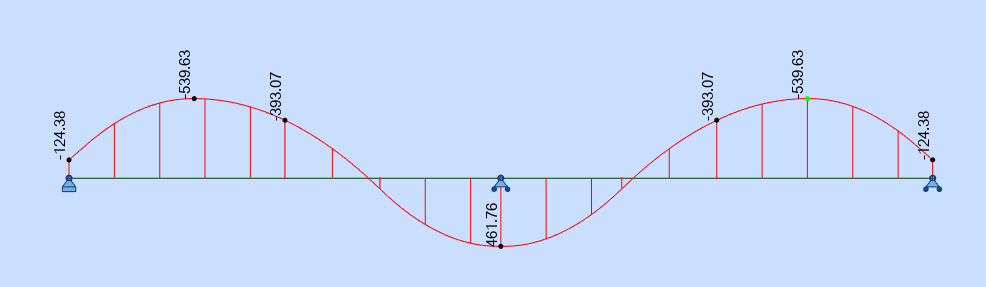
A des fins de contrôles, on peut :
-
toujours se ramener à un système isostatique (ici en supprimant l'appui central) ;
-
calculer le moment isostatique à mi portée (ou dans n'importe quelle section), par la somme des forces à gauche ou à droite. Les écarts ne doivent être supérieurs au % ;
-
sur cet exemple, vérifier que les résultats sont symétriques puisque la structure et la précontrainte le sont.
Courbe de tranchant “isostatique”: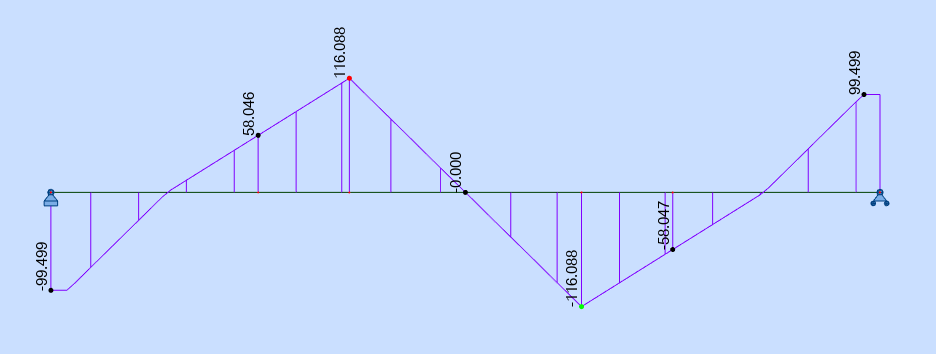
Courbe de moment “isostatique” (la courbe divisée par HA est le tracé du câble):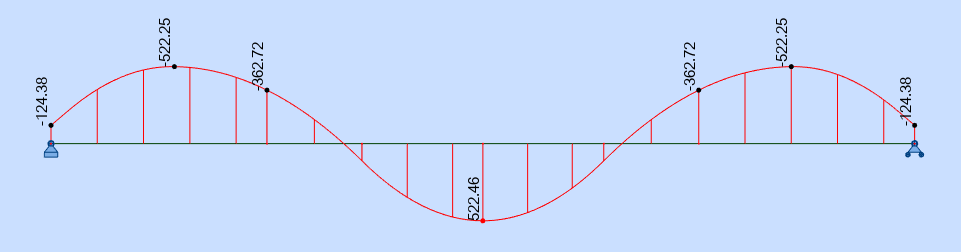
On peut s’assurer que les réactions d’appuis du cas de charges précontrainte “isostatique” sont nulles: 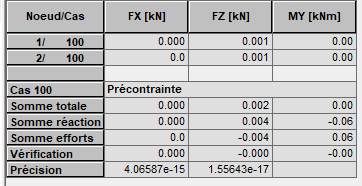
Calcul à l'aide d'un logiciel spécifique :
Cet exemple a été traité à l'aide d'un logiciel permettant de modéliser directement les câbles de précontrainte. La comparaison des résultats est disponible dans le document Exemple de précontrainte et excentrement.
C.14.2 Câble extérieur : forces aux ancrages et aux déviateurs
Comme ci-avant, en supposant une tension uniforme pour tout le câble, la méthode des forces externes permet d’appréhender les effets d’un câble de précontrainte en le modélisant comme une suite de forces concentrées.
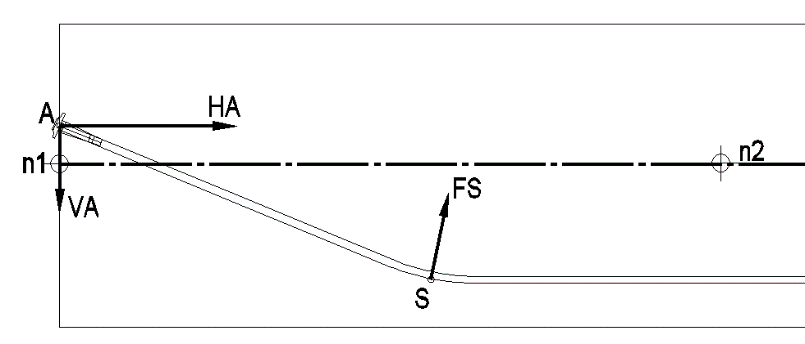
Au niveau de l’ancrage A, le câble applique sur le nœud n1 du modèle le torseur (HA,VA,MA), MA étant le couple produit par HA au nœud 1. A chaque point de déviation, le câble applique la force FS sur la barre n1-n2. On procède ainsi pour toutes les déviations du câble en terminant par l’ancrage d’extrémité.
C.14.3 Modélisation de la précontrainte dans les dalles
L’étude de la précontrainte dans les dalles s’effectue selon le même principe que pour les poutres, mais sur des éléments de coques.
L’utilisation d’un logiciel spécifique est bien sûr souhaitable sinon nécessaire. Il faudra s’assurer que la modélisation des éléments est bien réalisée à leur centre de gravité, et que la somme des réactions d’appui du cas de charge précontrainte est nulle.
C.14.4 Mise en tension des câbles (côté, ordre)
Attention au fait que les efforts apportés par la précontrainte, après pertes par frottement et recul d’ancrage, dépendent fortement du mode de mise en tension (par un seul côté, des deux côtés). Pour des câbles très longs, l’erreur peut s'avérer importante.
De même pour des structures fortement précontraintes, l’ordre de mise en tension peut avoir un impact et il n'est pas inutile de vérifier la structure à certaines phases intermédiaires de mise en tension.
$translationBooksC.15 Compléments liés au calcul phasé
C.15 Compléments liés au calcul phasé
Le lecteur pourra se reporter également à la Partie 1 - D.3 Les phases de construction.
Le phasage structurel peut conduire à la modification :
-
des sections résistantes ;
-
des conditions d’appui ;
-
des conditions de continuité internes de la structure.
Il peut concerner aussi bien les structures en élévation que les structures linéaires, longitudinalement ou transversalement, et bien sûr, la combinaison de tous ces cas est possible.
C.15.1 Comment faire un calcul phasé avec un logiciel non phasé ?
Cas A - Modification de la section résistante
C’est le cas lors de la mise en oeuvre des prédalles collaborantes autoportantes.
Dans la phase de réalisation, c’est la prédalle qui doit résister au poids de la structure (poids prédalle + dalle de compression). Ensuite, c’est le complexe [prédalle + dalle de compression] qui reprendra les charges ultérieurement mises en œuvre (superstructure, surcharges, …).
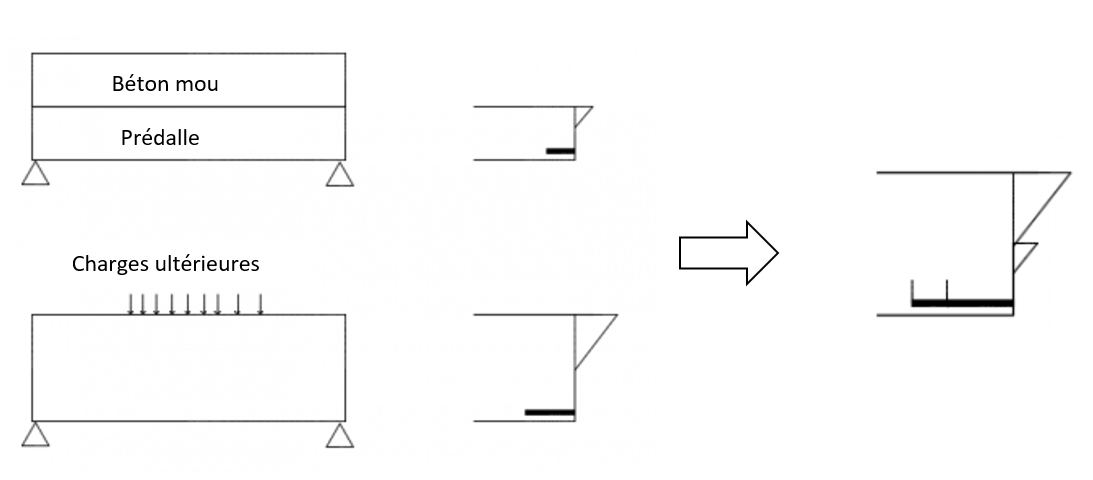
A l’ELS, il y a cumul des contraintes dans l’acier tendu, mais il n’y a pas de cumul direct des contraintes de compression dans le béton.
A l’ELU, la vérification est à réaliser pour la phase de bétonnage et pour la phase de service, mais sans prise en compte du phasage.
Cas B - Modification des conditions d’appui
C’est le cas d’une structure qui présente des appuis provisoires.
Il peut être associé à une modification de la structure résistante (exemple : prédalles collaborantes étayées).
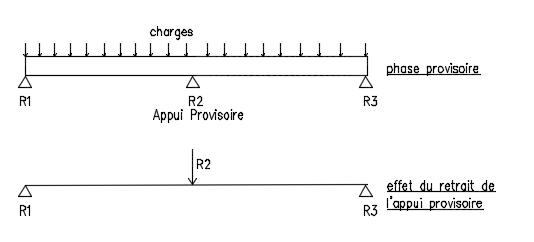
→ Cumul des sollicitations
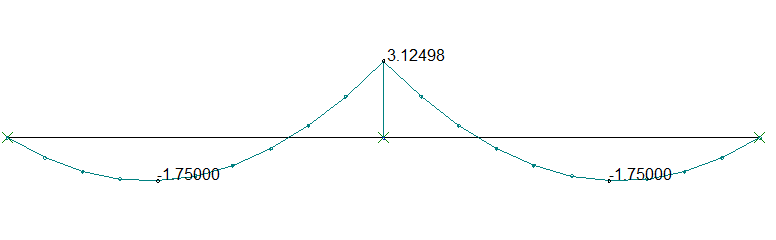
Phase 1 : Chargement sur la structure avec appui provisoire
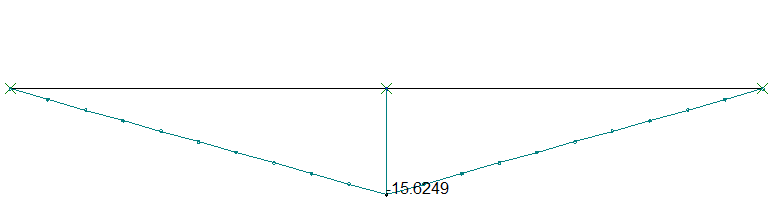
Phase 2 : Retrait de l’appui provisoire
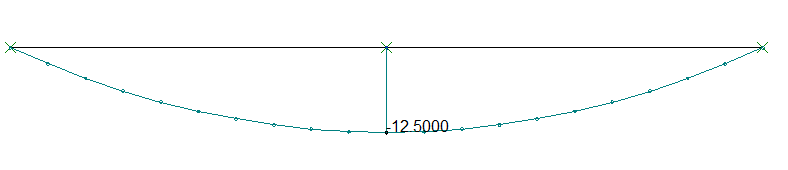
Phase 1 + Phase 2 : On retrouve bien une sollicitation finale identique à une structure non phasée.
Cette méthode permet de traiter la mise en place et le retrait d’appuis provisoires.
Il faut toujours faire attention aux conditions de déformation des structures lors de la mise en place d’appuis provisoires (mise au contact de l’appui provisoire sur une structure déformée)
Cas C - Modification de la continuité structurelle
C’est le cas d’une structure qui est clavée en cours de construction.
On calcule les sollicitations générées par les charges associées à un schéma statique, puis on cumule les sollicitations (s’il n’y a pas eu d’évolution de la section résistante) ou on cumule les contraintes (s’il y a eu évolution de la section résistante).
→ Cumul des sollicitations
Exemple :
Phase 1 : Poids propre repris par des travées isostatiques
Phase 2 : Surcharge reprise par une structure continue
Il faut faire attention à l’évolution des matériaux dans le temps. Dans le cas de structures en béton armé ou précontraint ou mixtes béton-acier, il faut prendre en compte le fluage (quantifiable par la différence entre la déformation instantanée et la déformation différée).
Dans l'exemple ci-dessus, avant clavage, la déformation de la structure correspond à une déformation quasi-instantanée. Après clavage, le béton réalise son fluage, tente donc d’augmenter ses déformations sous charge de longue durée, mais la structure est maintenant continue. Le bridages des déformations de fluage va ici générer sur l'appui un moment de continuité qui tend la fibre supérieure.
La prise en compte du fluage peut se faire de manière approchée (voir les documents du CEREMA sur le sujet) ou à l'aide d'un calcul EF avec fluage dit scientifique.
C.15.2 Poussage d’un pont en béton et lançage d’un pont métallique
Les deux modélisations ont en commun le fait que le pont, pendant ses phases de mise en place, va voir la position des nœuds d’appuis varier en fonction de l’avancement du poussage ou du lançage. Potentiellement, tout nœud de la structure peut être, à un moment donné, un nœud d’appui. Les logiciels acceptant un pseudo-langage de programmation peuvent, dans ce cas, présenter un avantage pour créer des boucles incrémentales permettant de simuler l’avancement (par incrémentation des numéros de nœuds d’appui). Dans la mesure du possible, avoir des barres de longueur identique facilite le déplacement régulier des appuis.
La modélisation des avant-becs, dans les deux cas, ne pose pas de problème particulier : ce sont des barres métalliques, généralement des I, encastrés à l’about de la structure définitive.
Pont poussé en béton : Le calcul est un calcul phasé presque classique. Les tronçons coulés sur longrines à l’arrière du pont sont modélisés par des barres reposant sur des appuis resserrés non linéaires en Z (soulèvement possible). Les barres, avec leurs dates de coulage, et la précontrainte, de poussage ou définitive sont activées, au fur et à mesure. In fine, l’avant bec et une partie de la précontrainte sont désactivés.
Charpente métallique lancée : les modèles peuvent représenter de très classiques bi ou multi-poutres mais également des caissons. Les principales différences avec le modèle du pont poussé en béton résident dans le fait :
-
que la structure est très déformable ;
-
qu’en phase provisoire, les tronçons rajoutés (de l’ordre de 30 m de longueur) reposent sur des appuis ponctuels, généralement deux appuis par tronçons, au lieu d’une longrine continue ;
-
que la structure possède une contreflèche, déterminée préalablement par le calcul de la charpente sur ses appuis définitifs. La jonction des tronçons métalliques doit s’effectuer en prenant les dispositions nécessaires pour garantir la continuité des rotations des extrémités des tronçons ; les deux types de modélisations possibles pour la décrire sont détaillées ci-après.
Lors de modélisation, lorsque l’on rajoute un tronçon à l’arrière de la charpente déjà réassemblée, il faut désactiver l’ensemble des barres et les réactiver en ayant rajouté le nouveau tronçon, sans quoi, il n’y a pas de continuité de la rotation au raboutage (figure ci-dessous) et la structure ne serait pas compatible avec le 3e point ci-dessus.

La modélisation peut aussi être réalisée par un phasage classique sous réserve de procéder à une « présentation » préalable des joints, ce qui consiste à trouver le décalage altimétrique des deux appuis 1 et 2 qui permet d’avoir la même rotation et la même altimétrie à chaque extrémité E1 et E2, schématiquement (figures suivantes) :

Translation verticale pour correspondance en Z des lèvres
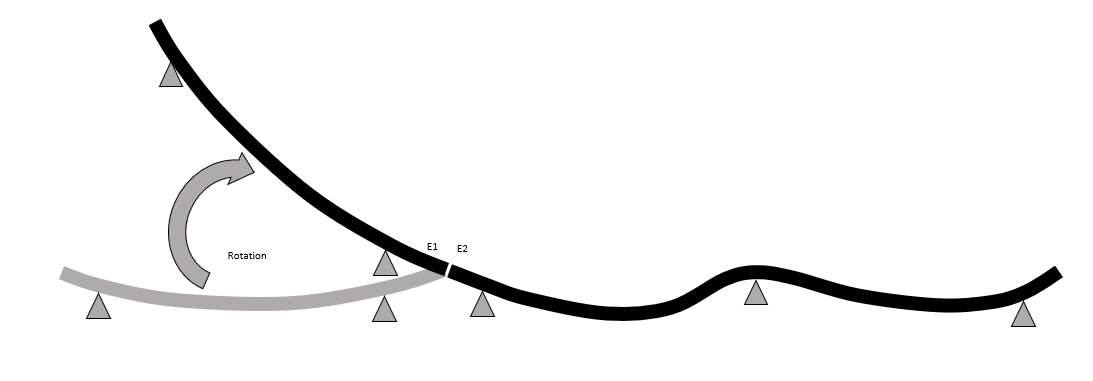
Déplacement des appuis 1 et 2 pour générer une rotation du tronçon
Une fois ces opérations réalisées dans le modèle, la continuité est assurée.
Pour la lançage, une pratique consiste à modéliser les axes neutres de l'ossature et de l'avant-bec suivant une géométrie cumulant algébriquement la forme de l’intrados (rectiligne ou parabolique, par exemple), le profil en long et la contreflèche, à une altitude arbitraire choisie. Au cours de l'avancement de la structure, pendant le lançage, on impose aux nœuds situés au droits des appuis provisoires, une dénivellation correspondant au décalage altimétrique entre la géométrie décrite ci-dessus et l'altitude des appuis provisoires. On vérifiera que la charpente est au contact des appuis de lançage grâce au signe de la réaction d'appui. Un appui en tension signifie que la structure n'est plus au contact et qu'il faut libérer l'appui. Enfin, pour les accostages, il y a toujours deux cas à étudier, juste avant et juste après.
C.15.3 Phasage affectant la section droite des sections
Dès lors que le phasage de construction d’une structure a un impact sur la distribution des contraintes sur les sections droites de la structure, il doit être pris en compte.
C’est le cas des structures construites avec un phasage transversal, où seules certaines parties de la structure voient les premiers chargements : cas des ponts mixtes, à poutrelles enrobées, à nervures avec hourdis coulé dans une deuxième phase, cas des dalles mixtes …
C.15.4 Élargissement d’une structure - Connexions différées
Dans le cas des élargissements, où une structure neuve (métallique ou en béton neuf) est connectée à une structure plus ancienne, la modélisation du phasage transversal et l'appréhension de la raideur relative des différents éléments est indispensable pour déterminer correctement les déformées de la structure et surtout les efforts de couture entre les structures.
Le cas des connexions différées entre plusieurs structures neuves est similaire: la prise en compte du fluage et du retrait s'avère indispensable pour un bon dimensionnement des efforts se développant dans les pièces.
C.15.5 Structure coulée en place ou préfabriquée - Contreflèche - Incidence sur le calcul
On se reportera aux § 2.1 et 2.2 du Guide “Conception des ponts à haubans” du Cerema.
$translationBooksC.16 Compléments liés aux calculs dynamiques et sismiques
C.16 Compléments liés aux calculs dynamiques et sismiques
Les sollicitations dynamiques engendrent des efforts inertiels et cinématiques dans la structure.
Si l'on effectue un dimensionnement suivant l'Eurocode 8, ce dernier fournit une explication détaillée des simplifications admissibles, dans la modélisation et dans le calcul, selon la régularité de la structure. Cette notion de régularité est explicitée au §4.2.3 de l’EN1998-1. Pour les ponts, le guide « Ponts courants en zone sismique » fournit également des critères de régularité et les simplifications de calcul admissibles.
Selon la sophistication du modèle et les objectifs recherchés, plusieurs points de vigilance sont à envisager.
C.16.1 Définition des axes généraux X et Y
La définition des axes généraux X et Y demande une attention particulière, car les résultats sismiques peuvent être erronés si ces axes ne sont pas proches des axes principaux d’inerties de la structure.
Nous indiquons ci-après 2 exemples visualisant ce sujet.
Exemple: Bloc d’angle d’un stade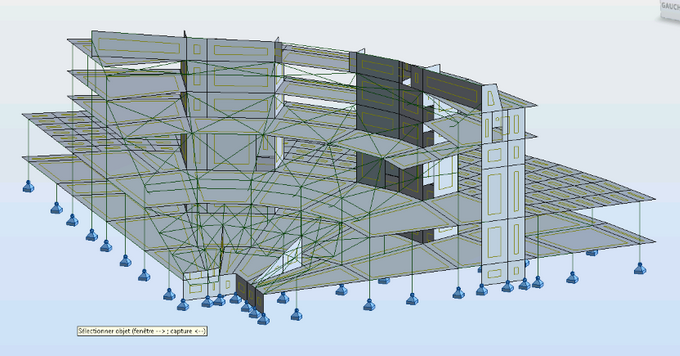
Vue d'ensemble du modèle du bloc d'angle
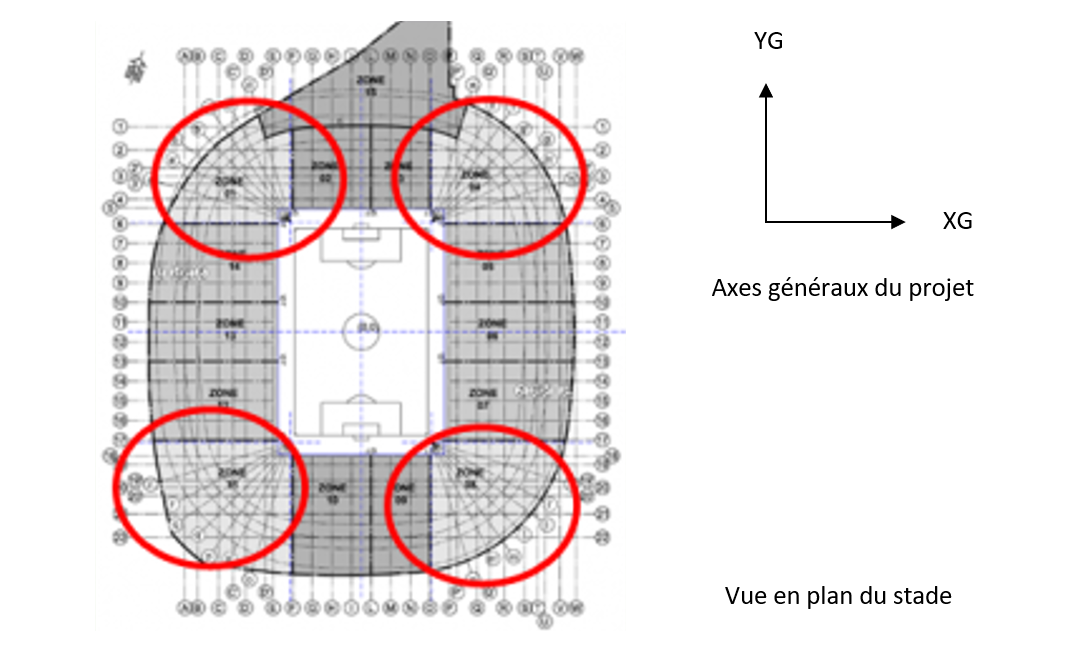
Il est nécessaire d’adopter pour les blocs d’angles des axes de description (X,Y) différents de ceux du projet général (XG,YG). L’axe X doit être radial dans le sens du 1er mode de vibration.
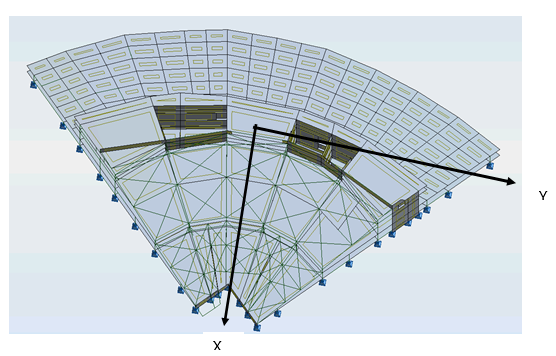
L'étude des modes propres montre alors que l'on retrouve les modes fondamentaux d'un bâtiment classique avec des modes bien différenciés selon les directions X et Y et un mode de torsion ce qui ne serait pas le cas en adoptant les axes généraux XG, YG, car chaque mode entraînerait des masses selon les 2 directions, ce qui perturberait les combinaisons CQC et celles de Newmark.
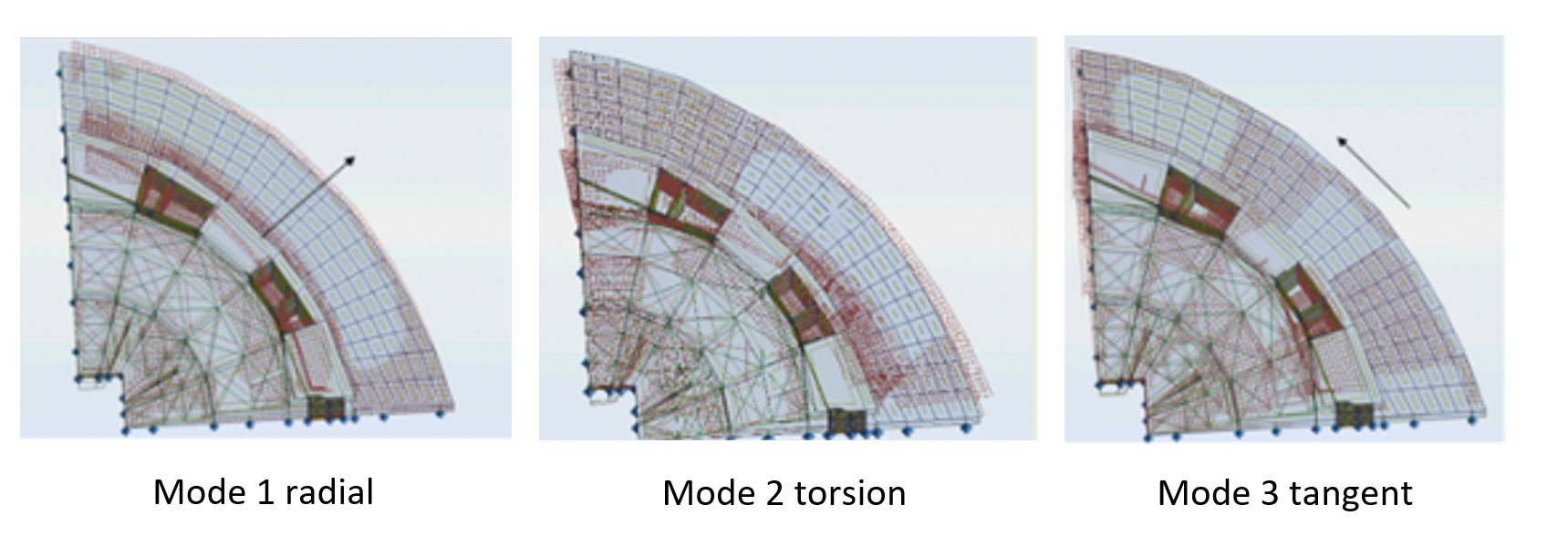
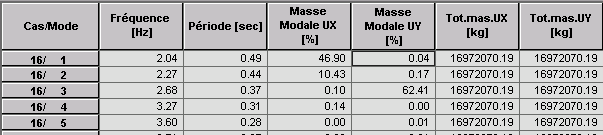
Exemple : Séisme sur un pont courbe
Dans l’exemple ci-après, deux calculs sismiques ont été réalisés pour ce viaduc TGV présentant une courbure en plan.
Le premier selon les axes généraux X et Y orientés selon la culée de gauche et le deuxième avec des axes orientés selon la culée de droite.
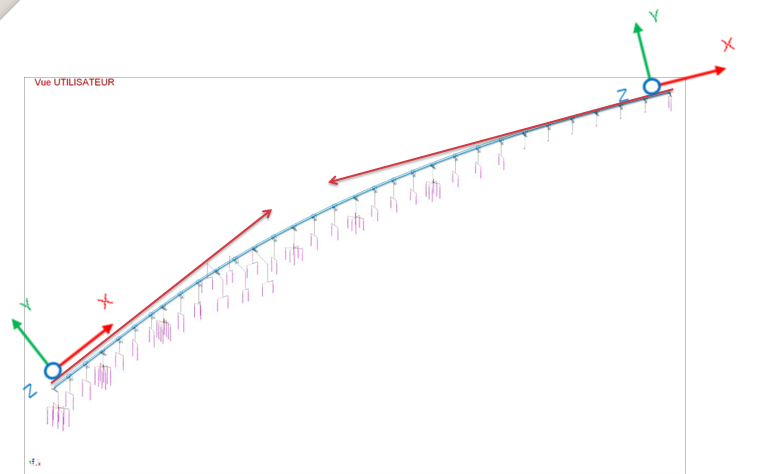
Le passage d’un modèle à un autre est réalisé en modifiant les coordonnées des nœuds du modèle. La comparaison des efforts à la base des appuis met en évidence des résultats très différents entre les 2 modèles.
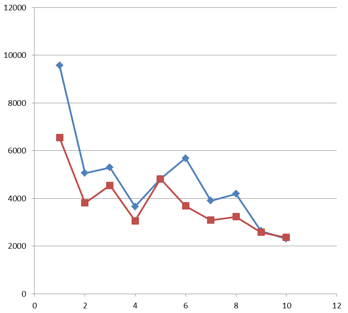
Graphique n° appui/effort en pied (kN)
Il est donc conseillé de réaliser les calculs sismiques des ponts sur des tracés droits en plan si la courbure le permet (se référer aux guides CEREMA), sinon, il faut réaliser plusieurs calculs en faisant varier les axes pour chaque appui étudié, solution complexe à éviter de préférence.
C.16.2 Modélisation des éléments non structuraux ou secondaires
Voir C.4 Modélisation des éléments non structuraux ou des équipements.
Les éléments non structuraux et les équipements n’ont pas à être modélisés si leur masse reste faible par rapport à celle du bâtiment. Cependant, il faut s’assurer que leur raideur n’influence pas le comportement de la structure. Dans le cas contraire, il faut les prendre en compte. Pour un complément d'information, on peut se référer au §2.4.5.2 du guide de l’ASN et au cahier technique 36 de l’AFPS concernant le dimensionnement des éléments non structuraux sous séisme.
La masse de ces éléments non structuraux devra être définie correctement dans l’espace, lorsqu’elle n’est pas négligeable. Par exemple, le décalage des masses des éléments latéraux des ponts par rapport au centre des sections devra être bien défini pour prise en compte dans les modes de torsion.
La répartition des masses sur les planchers peut engendrer de nombreux modes locaux lors d’une analyse modale et rendre difficile l’exploitation du modèle. Il est recommandé, dans ce cas, de privilégier des masses ponctuelles et de refaire une étude locale si besoin.
C.16.3 Transformation des charges en masse
La majorité des logiciels calculent directement le poids de la structure ou possèdent une option pour le faire sur la base de la densité ou du poids volumique des matériaux.
Pour les calculs sismiques et dynamiques, il faut veiller à ce que les poids, forces et pressions soient convertis en masses avec la pondération règlementaire (cas des équipements et superstructures ou d’une partie des charges d’exploitation).
Pour réduire le nombre de modes propres non utiles à un calcul global, on peut privilégier les options qui transforment les masses réparties en masses aux nœuds ou introduire soi-même les masses ajoutées à la main, aux nœuds.
C.16.4 Attention à la cohérence des unités
La justesse des calculs sismiques ou dynamiques est particulièrement sensible à la cohérence des unités. Les forces d’inerties font intervenir l’accélération de la pesanteur g, dont l’unité (généralement définie par défaut) doit être cohérente avec toutes les autres.
Trivial, mais il est toujours utile de rappeler que l'unité de masse est … le kilogramme.
On sera particulièrement vigilant dans le cadre de l’utilisation d’anciennes normes ou règlements, pouvant employer des unités telles que le kgf (kilogramme force). De manière générale, il est conseillé de privilégier l’utilisation stricte des unités système international, a minima pour le contrôle des résultats.
Prenons l’exemple simple du calcul du poids propre. Pour la plupart des logiciels, l’action de la pesanteur est définie par l'application d’une accélération verticale appliquée à l’ensemble de la structure. En interne, le logiciel va calculer la masse de la structure en calculant au préalable pour chaque élément son volume multiplié par la densité de son matériau. Si on désire obtenir le poids propre en N et que les dimensions géométriques et la densité ont été définies respectivement en mm et en kg/mm3, l’accélération devra être définie en… m/s2:

Par exemple la masse équivalente à une surcharge d'exploitation de 20 KN est égale à 20 000 (N)/ 9.81 (m/s2) = 2038 Kg soit 2.038 tonnes.
C.16.5 Matériaux
Les lois des matériaux ainsi que les coefficients partiels dépendent du type d’analyse effectué.
En béton, par exemple, le module d’Young instantané sera privilégié.
Pour tenir compte de l’état de fissuration des éléments, le module EI peut être modifié :
-
soit par un coefficient minorateur appliqué sur le module d’Young E;
-
soit par modification de la section résistante ou de l’inerte directement.
Le référentiel appliqué peut préciser le coefficient de Poisson à appliquer en fonction du type de calcul. Celui-ci pourra être modifié pour tenir compte de l’état de fissuration, par exemple, égal à zéro dans le cas d’un élément fissuré ou sous séisme ELA.
C.16.6 Modélisation des éléments de contreventements des structures métalliques
Les éléments de contreventement assurent la stabilité latérale de la structure. Il est important de traduire leur fonctionnement réel. Par exemple, pour des Croix de Saint-André, les barres ne travaillent qu’en traction, leur mise en compression entraînant leur flambement, instantanément. Les croix ne doivent donc pas être modélisées en totalité si un calcul linéaire est prévu. Dans le cas contraire, on surestimerait la capacité des contreventements avec un facteur de l'ordre de 2. Voir C.2 Modélisation des éléments principaux
C.16.7 Conditions aux limites
Selon les modèles, la prise en compte de l’interaction sol-structure dynamique peut être nécessaire. Il est nécessaire de s’assurer que la structure ne se soulève pas de manière exagérée pour rester dans le domaine de validité d’une étude linéaire si les ressorts sont modélisés de la sorte.
Pour les études sous séisme, l’ingénieur peut calculer les raideurs en se référant aux documents suivants :
-
« Ponts en zone sismique » édité par le CEREMA qui propose au chapitre 4.3.3.2 des formules de calculs assez simples;
-
Conception-construction parasismique - V. Davidovici §4.3.4.4 Modélisation du sol par un système de ressorts amortis - Collection Eurocode - Afnor Editions;
-
Formules de Gazetas : que l’on peut consulter dans l’annexe D de « Fondations et procédés d’amélioration du sol de Davidovici » (ou autres références).
Tous ces documents déterminent les raideurs à partir des modules de cisaillement et des coefficients de Poisson des sols, mais également des dimensions caractéristiques de la fondation. Ces raideurs dépendent des fréquences de vibration de la structure étudiée.
Cas des radiers :
La modélisation d’un radier sous chargement dynamique est plus complexe, car les ressorts devront représenter à la fois les raideurs verticales, horizontales et en rotation, déterminées par l’étude d’interaction sol-structure.
On se référera aux documents spécifiques à ce type d’études.
Plusieurs formes de modélisation sont possibles :
-
par un ressort ponctuel au centre du radier affecté des 6 raideurs (et 6 amortissements), avec des liaisons rigides sur tous les nœuds du radier;
Avantage : une représentation fidèle de l’ISS dans les calculs dynamiques.
Inconvénient : il n’est pas possible de déterminer les efforts dans le radier du fait de la présence des liaisons rigides qui rigidifient artificiellement le radier. Il faut alors procéder à un calcul local du radier soumis aux pressions de sols déduites des efforts dans le ressort central. En particulier, dans le cas d’un radier de grandes dimensions par rapport à son épaisseur, cette méthode n’est pas adaptée.
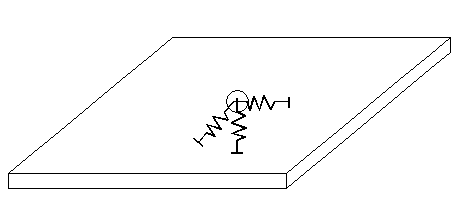
-
par des ressorts placés uniformément sous le radier (comme pour l’étude statique);
Dans ce cas chaque nœud du radier est relié à 3 ressorts, un dans chaque direction X, Y, Z.
Les ressorts horizontaux selon X ou Y seront déduits directement des raideurs globales en translation, par contre les raideurs des ressorts verticaux devront représenter soit la raideur verticale globale, soit la raideur en rotation globale dans une direction donnée. Cette approche implique 3 modèles de calcul pour analyser les 3 directions de séisme.
Avantage : une modélisation plus simple, permettant de calculer les efforts dans le radier.
Inconvénient : une des 2 raideurs verticales ou en rotation n’est pas représentée dans chacun des modèles de calcul. La raideur en torsion n’est de fait pas intégrée.
-
par la mise en place d’un matelas de ressorts;
Ce type de modélisation est surtout utilisé dans les structures complexes, un matelas de ressorts affectés à chaque nœud du radier permet de représenter toutes les raideurs globales.
Avantage : l’ISS est modélisée finement.
Inconvénient : la modélisation est complexe et ne peut être appliquée qu’en utilisant des logiciels spécifiques en connaissance de cause.
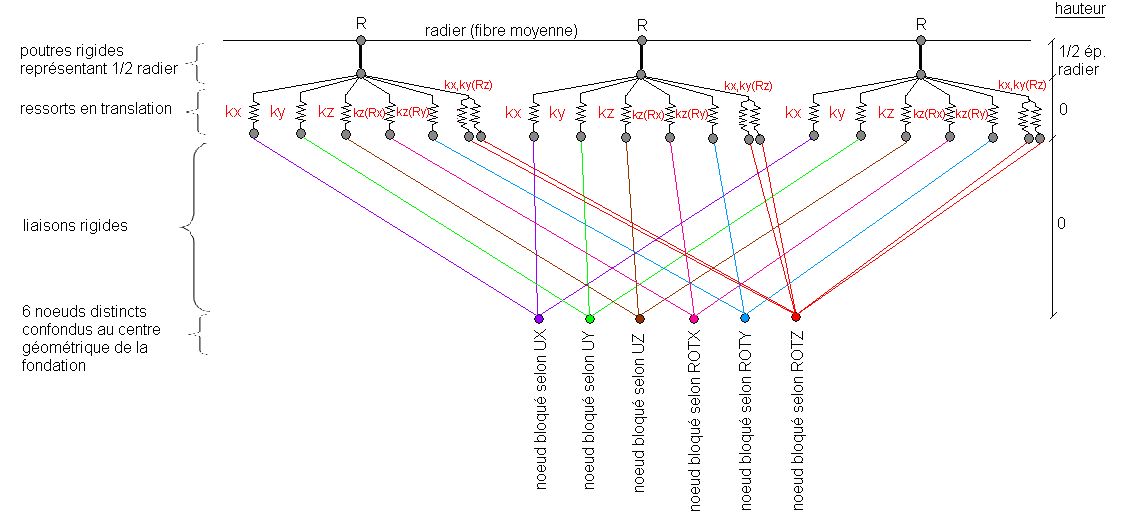
Figure : Schématisation du matelas de ressorts, image Tractebel
C.16.8 Analyse modale spectrale
Troncature – nombre de modes
La notion théorique de troncature est définie dans la partie 1 de ce guide. En pratique, concernant le nombre de modes à retenir pour le calcul, on conseillera :
-
de ne pas dépasser 100 modes pour les ouvrages classiques;
-
d'aller jusqu’à la fréquence de coupure (généralement 33 Hz);
-
de faire appel à un pseudo mode pour la masse participante non prise en compte (EN 1998-2/§4.2.1.2);
-
de ne pas se limiter aux modes ayant le plus de masses participantes, car les modes antisymétriques ont classiquement une masse participante très basse mais induisent des efforts non nuls;
-
de réfléchir à la pertinence de retenir ou non dans l’analyse, les modes locaux.
Coefficients de comportement
Le coefficient ou plutôt les coefficients de comportement, puisqu'ils peuvent être différents dans chaque direction, sont intégrés dans la définition des spectres de calcul. Attention à vérifier que les déplacements calculés sont bien remultipliés par ce même coefficient.
Signature des modes
A l’issue de la combinaison des réponses spectrales, le signe des efforts est perdu (toutes les valeurs sont positives). Ceci peut générer des difficultés d’exploitation lorsque l’on souhaite calculer un torseur ou que l’on souhaite étudier des efforts concomitants (cf. D 7.4.5).
Pour réattribuer un signe aux différentes quantités calculées, il existe plusieurs approches possibles dont celles décrites ci-dessous :
-
Attribution du signe d’un des modes. Pour les structures ayant un mode prépondérant dans chaque direction, il est possible d’assigner le signe du mode prépondérant aux quantités calculées. Ceci est intéressant pour le comportement global de la structure et s’avère très efficace tant que la participation de ce mode est supérieur à 60% de la masse modale de la structure. Par contre, pour les éléments répondant sur des modes locaux plus élevés, ceci peut ne pas être approprié (cf. exemple de planchers épais dans des sites industriels);
-
Attribution du signe suite à une analyse d’accélération uniforme. Pour chaque direction, on applique une accélération unitaire et on retient le signe obtenu;
-
Analyse par la méthode des ellipses. Lorsque la justification d’un élément structurel doit prendre en compte plusieurs composantes de sollicitations, il est loisible d’établir le domaine de concomitance de ces grandeurs, pour ne pas introduire de conservatisme dans le calcul.
C.16.9 Amortissement
Dans le cadre d'une étude de structure avec un spectre de calcul comportant un coefficient de comportement, ce dernier tient déjà compte de l’amortissement. Il ne faut pas vouloir chercher à en rajouter un autre.
Si on est dans le cadre d'un dimensionnement à l'aide d'un spectre de réponse élastique, il faut retenir les amortissements des matériaux.
On veillera dans la mise en données à ce que l’amortissement des matériaux compris ou pris par défaut par le logiciel soient cohérents avec le règlement et l’analyse menée. Par exemple, il est nécessaire de distinguer le béton armé du béton précontraint, ou encore les charpentes soudées des charpentes boulonnées dans la définition des amortissements des matériaux.
C.16.10 Schéma d’intégration en temps et discrétisation
La résolution d’une sollicitation dynamique nécessite la mise en œuvre d’une méthode d’intégration spécifique. Le chapitre 2 de la partie 1 fournit des détails sur ces méthodes et des indications pour choisir le pas de temps et le maillage en fonction du problème à résoudre. Il convient de faire appel à des ingénieurs spécialistes de ce type d’étude.
$translationBooksChapitre D. Analyse et exploitation des résultats
Chapitre D. Analyse et exploitation des résultats
D.1 Généralités sur les calculs numériques
D.3 Exploitation des résultats
D.4 Validations réglementaires : comportement en béton armé des éléments
D.5 Comprendre et analyser les pics (cas du béton)
D.6 Comprendre et analyser les pics (cas d’un assemblage métallique)
D.7 Compléments spécifiques pour les calculs dynamiques
$translationBooksD.1 Généralités sur les calculs numériques
D.1 Généralités sur les calculs numériques
D.1.1 Temps de calcul
Le temps de calcul (au sens large : résolution du système d’équations et stockage des résultats) est un point primordial dans la réflexion à associer à une modélisation aux Eléments Finis.
Il doit rester compatible avec le budget et le délai associés au projet. La recherche d’un temps de calcul optimisé est même un des éléments clés de l’économie d’un projet.
Le temps de calcul est influencé par différents facteurs.
-
Le modèle aux éléments finis :
-
Nombre de degrés de liberté ;
-
Formulation des éléments, nombre de points d’intégration.
-
Des moyens d’optimisation peuvent être l’utilisation de modèles simplifiés, de sous-modèles, de sous-structures, de symétries, de tailles de mailles adaptées localement. Attention toutefois pour les calculs explicites, le pas de temps est calé sur la dimension du plus petit élément.
-
Les moyens informatiques :
-
la mémoire vive (stockage temporaire) ;
-
le système d’exploitation (32 ou 64 bits) ;
-
le calcul est-il fait en local (sur le poste de l’utilisateur) ? sur un serveur local ? sur un serveur externe ? Les temps de copie du modèle et des résultats peuvent s’avérer longs, de même que le temps associé à la liste d’attente des autres calculs lancés sur un même serveur ;
-
la capacité et le nombre de processeurs : on vérifiera le « temps CPU » (Central Processing Unit) généralement fourni par le logiciel.
-
L’optimisation, pour un moyen informatique donné, peut consister à effectuer le calcul en batch (lancement du calcul en lignes de commande sans l’interface), à paralléliser les calculs (sur plusieurs cœurs de processeurs) et/ou à effectuer des poursuites de calcul, si le logiciel le permet.
-
Le type d’analyse :
-
Linéaire/non-linéaire et les algorithmes de résolution associés ;
-
Méthode d’intégration numérique (intégration directe/projection sur base modale, schéma implicite/explicite) et le choix du solveur pour les calculs en dynamique.
-
Le type d’analyse est logiquement associé au problème à résoudre et à la précision souhaitée des résultats ; l’optimisation est donc laissée à la charge du modélisateur. On souligne toutefois que dans le cas d’un calcul transitoire, la durée du calcul (en termes de chargement et réponse de la structure) ne doit pas être surévaluée pour ne pas impliquer de durée de calcul (temps machine) superflue.
-
L’anticipation des « post-traitements » :
-
pour certains logiciels, il est possible de ne sélectionner (et conserver) que les grandeurs d’intérêts choisies par l’utilisateur, de même que les instants (dans le cas de calculs transitoires ou par phases) : le temps machine d’écriture des résultats s’en trouve réduit ;
-
le nombre de modes à sauvegarder/réutiliser dans le cas d’une analyse modale peut généralement être modifié (définition des filtres variables selon les logiciels) ;
-
la visualisation en temps réel des résultats peut permettre de stopper un calcul en cours (mais elle entraîne généralement une augmentation des durées de calcul) ;
-
l’analyse des résultats peut être effectuée à l’aide de post-processeurs indépendants du logiciel de calcul aux Éléments Finis pour réduire les temps d’exploitation.
-
L’automatisation du calcul et des post-traitements (après validation du premier tour de calcul et avec une utilisation réfléchie incluant les vérifications appropriées) s’avère intéressante lorsque l’on considère que l’utilisateur va être amené à réaliser plusieurs fois le même calcul sur différents modèles ou des calculs similaires sur un même modèle.
L’acceptabilité du temps de calcul doit être appréciée en intégrant le fait que le modèle va tourner de nombreuses fois et va se complexifier au fur et à mesure des phases d’étude.
D.1.2 Convergence du logiciel – Cas des calculs élastiques directs
Dans les calculs élastiques directs (calcul statique linéaire et calcul modal spectral), il y a très peu de raisons pour que le logiciel ne converge pas :
-
soit la structure est instable ;
-
soit l’inversion de la matrice de raideur est rendue impossible par des écarts de rigidité trop grands entre les éléments.
Tous les messages d’erreur, à ce stade, sont liés à ces deux cas.
Du fait des conditions aux limites mises en place, certains déplacements, translation(s) et/ou rotation(s) de nœuds de la structure sont imposés (un blocage est un déplacement imposé nul). L’ensemble de ces déplacements bloqués peut cependant apparaître insuffisant pour empêcher un mouvement d’ensemble de la structure.
Il convient, en se plaçant dans un repère approprié, d’analyser les effets de l’ensemble des déplacements imposés sur les mouvements d’ensemble de la structure et d’ajouter éventuellement un ou plusieurs blocages afin d’assurer la stabilité de la structure. On vérifiera à la fin de l’exécution des calculs que les réactions au droit de ces blocages supplémentaires sont nulles ou négligeables ; effort pour un blocage en déplacement, moment pour un blocage en rotation.
Certains logiciels, pour certaines configurations géométriques de structures, passent outre ce problème d’instabilité ; dans ce cas, les contraintes et les déformations sont correctes mais certains déplacements sont quelque peu déraisonnables. Une autre instabilité souvent rencontrée concerne la liaison de types d’éléments structuraux différents est précisée au paragraphe C.6.3.
Il est à noter que les messages d’erreur des logiciels sont parfois peu explicites sur le caractère global, local et/ou numérique des instabilités.
En outre certains logiciels permettent d’aller au bout du calcul malgré un message d’avertissement ou d’erreur. Ceci peut éventuellement aider à comprendre ou visualiser d’où vient le problème, mais on ne saurait se satisfaire des résultats obtenus dans ce cadre.
Il convient, in fine, d’arriver à un modèle qui tourne sans erreurs.

Ces problèmes d’instabilités globales et locales peuvent être détectés en procédant à de simples calculs :
-
soit des calculs statiques linéaires en appliquant une accélération globale (10 m/s2 par exemple) à la structure ; on peut créer trois cas de charges selon les 3 directions principales ;
-
soit à un calcul modal (détermination des premières fréquences propres).
Si la structure présente des instabilités globales, le calcul statique a peu de chances d’aboutir tandis que le calcul modal présentera des modes rigides.
Si la structure présente des discontinuités, ces dernières seront mises en évidence par l’observation de l’allure de la déformée ou des modes propres. Attention, la prise en compte des déformées d'effort tranchant conduit à des ruptures d’allures de déformées.
D.1.3 Convergence du logiciel – Cas des calculs itératifs
Pour les calculs non-linéaires, la convergence d’un calcul aux Eléments Finis est atteinte lors de l’obtention d’une fonction interpolant la solution pour chacun des éléments finis (principe de la discrétisation).
Les critères de convergence sont soit donnés par le calculateur, soit pris par défaut par le logiciel. Le calcul aux éléments finis consiste en une série d’itérations et il s’arrête soit quand le nombre maximum d’itérations prédéfini a été atteint, soit quand certaines mesures d’écart entre deux itérations successives sont inférieures à des seuils prédéfinis (c’est ce qu’on appelle les critères de convergence).
Par contre, ce n’est pas parce que le calcul s’arrête qu’il a convergé vers une solution valide. Par exemple, des critères de déformations trop lâches par rapport à la réalité ou un nombre maximum d’itérations trop faible peuvent fournir un résultat très éloigné de la réalité.
D.1.4 Convergence du modèle
On considère qu’on a atteint la convergence d’un modèle, quand une faible modification de la taille et de la répartition des mailles ne vient pas perturber sensiblement les résultats.
En toute rigueur, il est conseillé d’effectuer une étude de sensibilité du maillage sur les grandeurs post-traitées; ainsi, effectuer la même analyse sur différents maillages (réduction de la taille de maille, par exemple), devrait - si ce n’est fournir des résultats similaires (tolérance à apprécier) - converger vers une solution acceptable par l’utilisateur. On veillera à ne pas raisonner sur les valeurs de pics et à ne pas oublier que plusieurs raffinements successifs de mailles peuvent conduire à une divergence des résultats.
Il convient également d’analyser les messages d’alerte du logiciel (« Warning » sur la taille ou la forme des mailles) pour estimer s’ils sont de nature à altérer les résultats.
$translationBooksD.2 Combinaisons d’actions
D.2 Combinaisons d’actions
D.2.1 Combinaisons et enveloppes
Rappelons qu'utiliser une combinaison d’actions consiste à cumuler les effets structurels de différentes actions, en affectant des coefficients de pondération aux différentes actions, pour correspondre aux combinaisons qui sont définies dans les normes.
En toute rigueur, les règlements demandent de vérifier toutes les combinaisons. Dans le cas d’un bâtiment, le nombre de ces combinaisons reste limité et il est possible pour le logiciel de toutes les calculer. En revanche, dans les cas complexes et notamment dans le cas des charges roulantes, le nombre théorique de combinaisons devient ingérable ; on utilise alors les enveloppes d’efforts.
Une enveloppe est constituée de plusieurs cas de chargement et enregistre uniquement les valeurs extrêmes des différentes composantes (avec les composantes concomitantes).
Conformément aux règlements, certaines actions sur les structures ne sont pas à cumuler, l’occurrence de l’une étant incompatible avec celle de l’autre. Il est alors utile d’intégrer ces actions non cumulables dans une enveloppe, qui va retenir, pour chaque effet étudié, l’action la plus défavorable parmi un groupe d’actions non cumulables. Pour les ponts, on a ainsi classiquement l’enveloppe des actions thermiques, l’enveloppe des actions du vent et l’enveloppe des charges routières.
Rappelons que vouloir cumuler des cas unitaires calculés par une approche non linéaires (NL) n'a pas de sens physique. Certains logiciels autorisent cependant des calculs non linéaires sur des “combinaisons”. Dans ce cas, le logiciel va recréer un cas (la “combinaison”) à partir des cas de charges unitaires et effectuer le calcul NL sur cette somme de charges. Si le logiciel ne le permet pas, il faudra créer des combinaisons en regroupant à la main les charges unitaires. Dans ce cas de figure, il est, encore une fois, fondamental de comprendre ce que fait le logiciel.
Illustration du texte ci-avant sur un exemple
Il s'agit d'une galerie secondaire d'un tunnel. La structure est intégralement appuyée sur des ressorts non linéaires - le sol ne reprenant pas de traction, les ressorts sont neutralisés par le logiciel s'il y a un décollement sol-structure.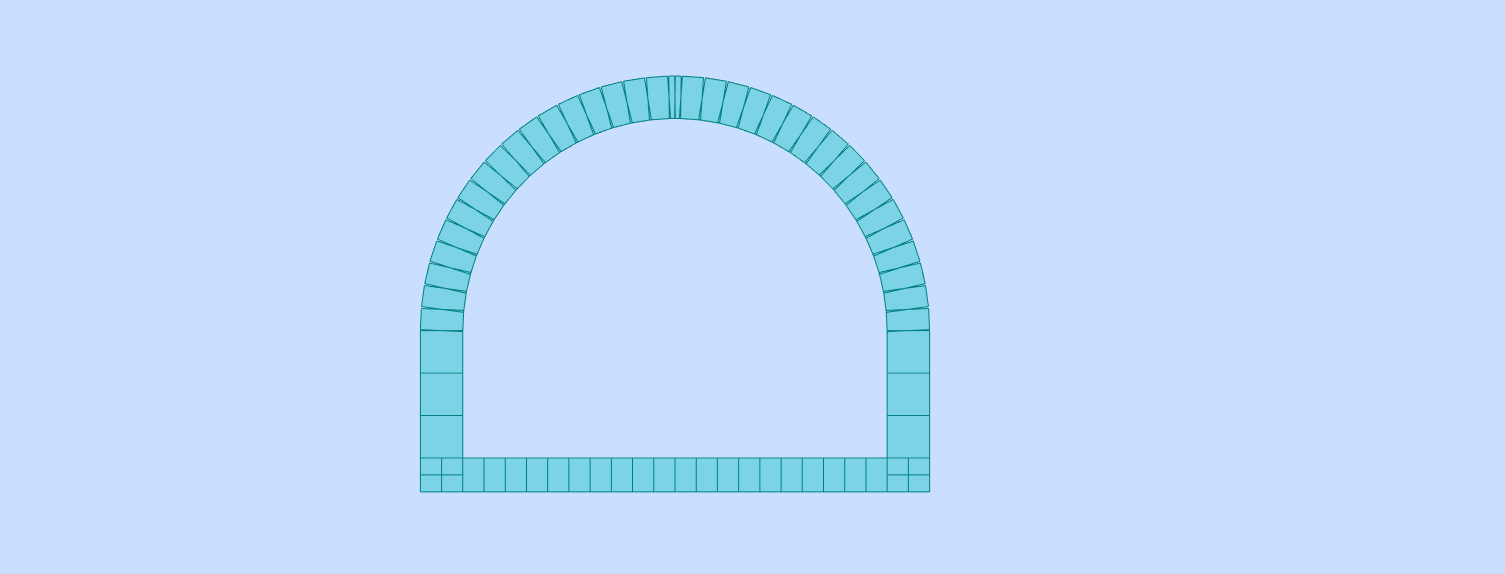
Schéma de la structure
On définit les deux cas unitaires suivants:
-
poids propre + poids et poussée des terres ;
-
sous-pressions hydrostatiques.
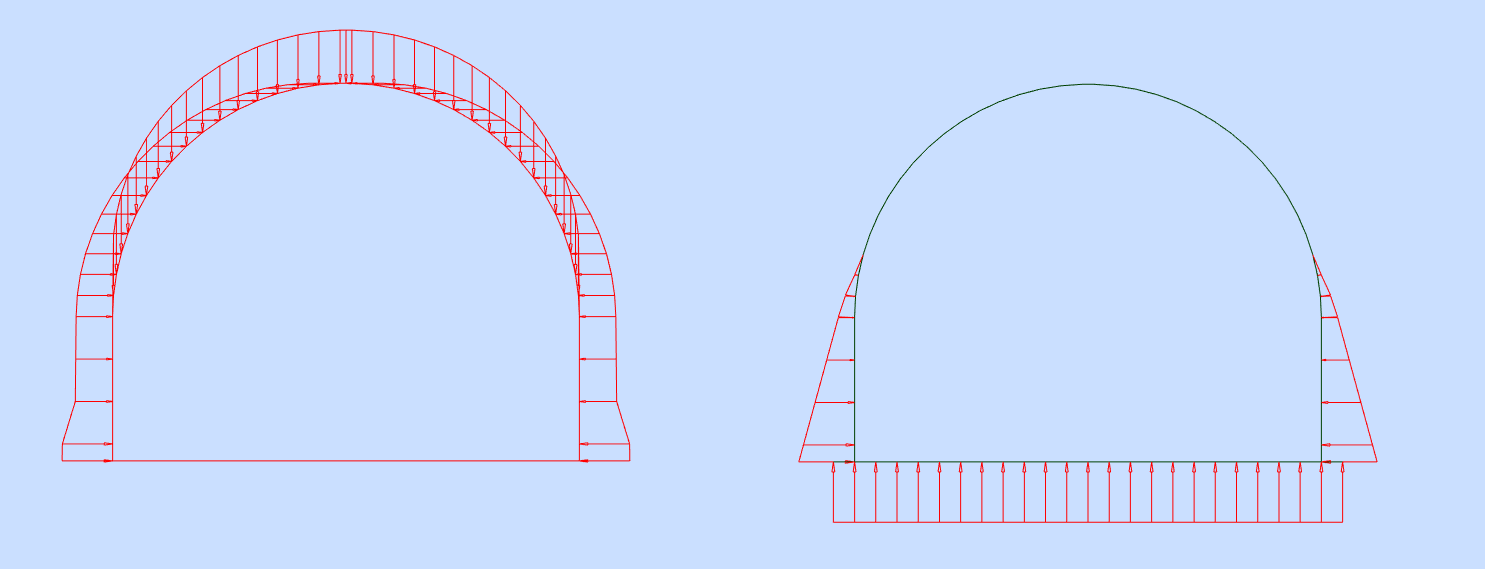
Charges gravitaires (à gauche) et charges de sous-pressions d'eau (à droite)
Les résultats suivants montrent que bien que le logiciel soit capable de calculer tous les cas unitaires en non-linéaire, la combinaison des deux cas est recalculée intégralement et indépendamment…
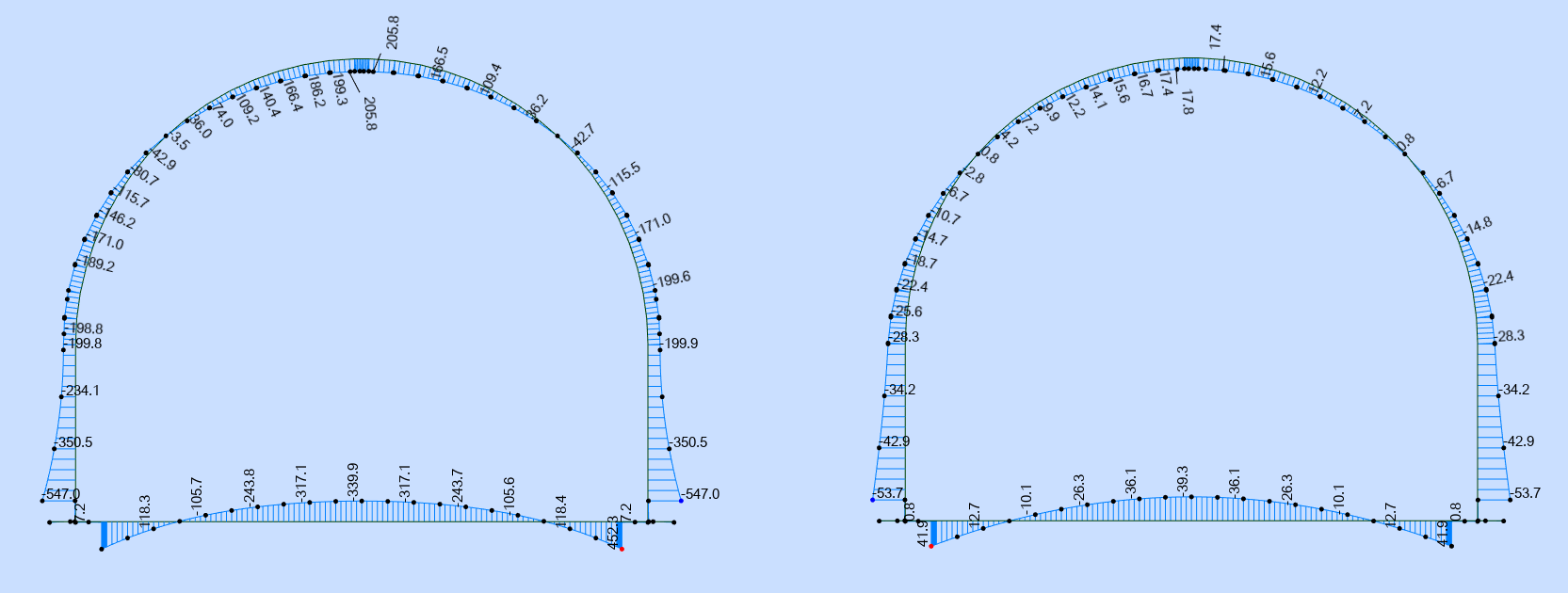
Résultats des cas unitaires: moments de flexion - charges gravitaires (à gauche) et charges de sous-pressions d'eau (à droite)
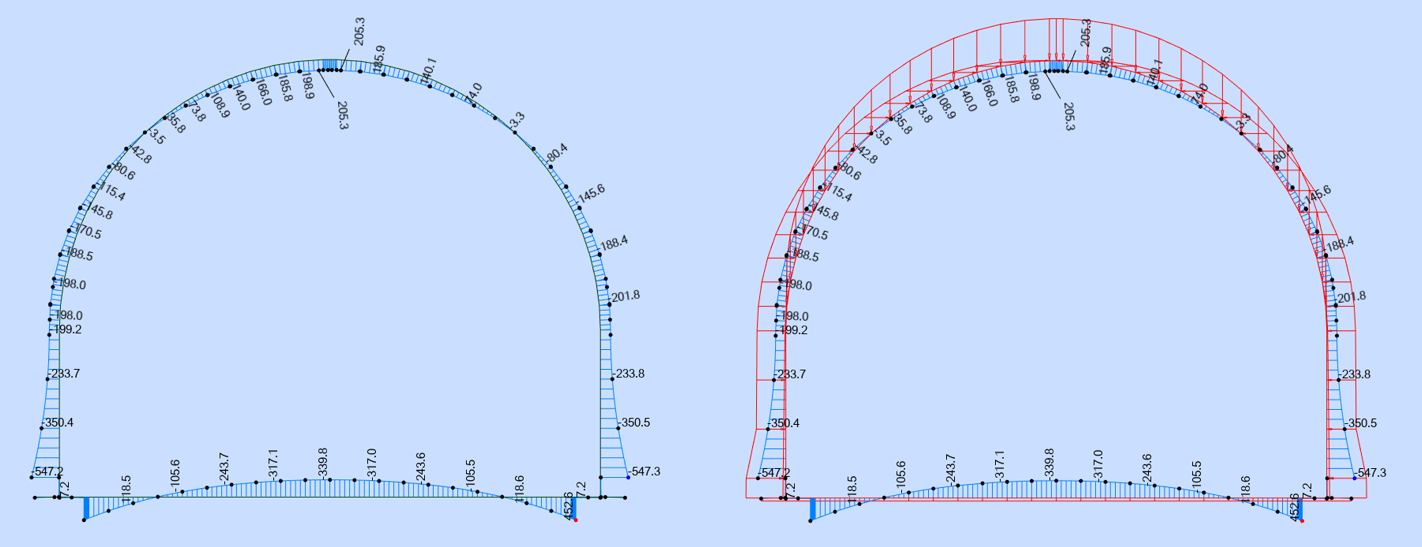
Résultats de la combinaison des deux cas : moments de flexion - combinaison logiciel (à gauche) et cumul des charges dans un nouveau cas créé manuellement à partir des cas unitaires (à droite) - résultats identiques
… puisque le cumul des cas unitaires n'aboutit pas aux résultats de la combinaison.
Le diagramme des pressions sur le sol est parlant: les sous-pressions d'eau forcent la voûte à s'appuyer sur le sol en partie haute “vers le haut” (figure de droite) …
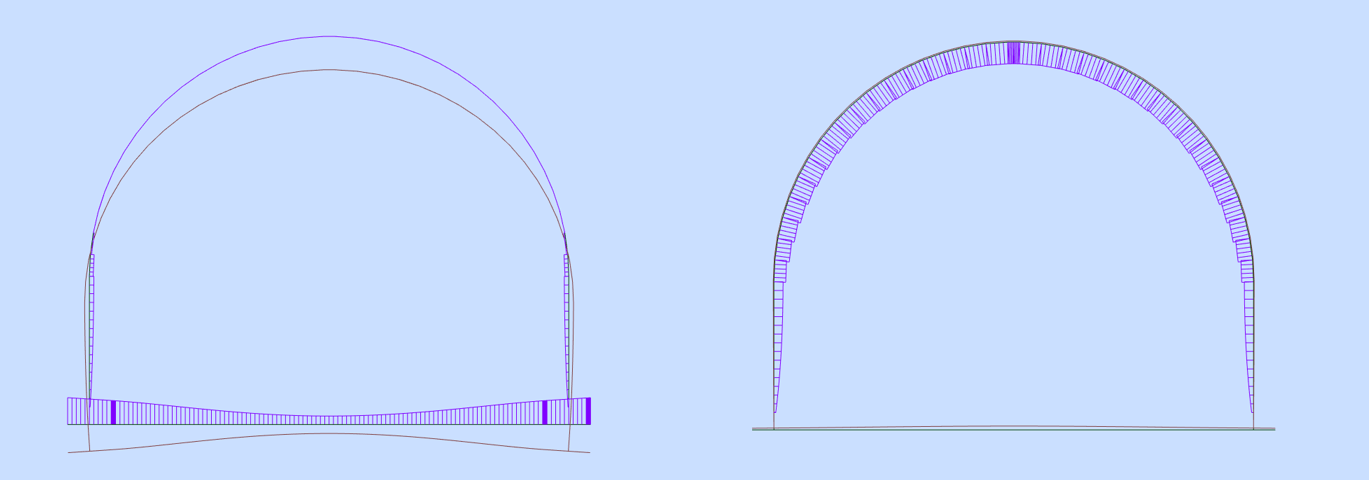
Pressions sur le sol sous charges gravitaires (à gauche) et sous charges de sous-pression d'eau (à droite)
… mais une fois cumulé au cas des charges gravitaires, le sommet de la voûte ne pousse plus vers le haut, ce que l'on voit sur les résultats de la combinaison faite par le logiciel: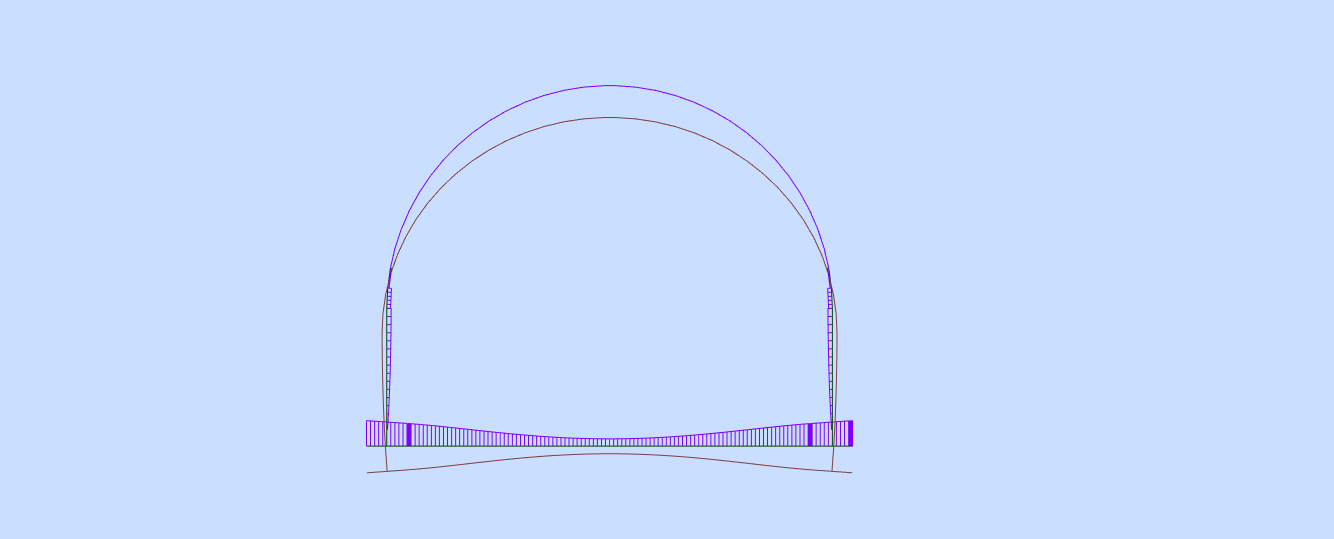
Pressions sur le sol de la combinaison des charges gravitaires et des sous-pressions
Remarque: sans ressorts sur la voûte, le second cas ne convergerait pas.
D.2.2 Attention à l’exploitation des résultats d’enveloppes
L’utilisation des enveloppes entraîne l’enregistrement en base de données des déplacements, des valeurs extrêmes d’efforts, de contraintes ou de réactions d’appui.
La plupart des logiciels de calcul offrent la possibilité de stocker les valeurs extrêmes des efforts et contraintes, soit seules, soit accompagnées des valeurs des efforts et contraintes concomitantes.
Il convient de bien comprendre, avant d’utiliser les résultats des enveloppes pour des post- traitements ultérieurs, si les efforts et contraintes sont ou non concomitants.
Par exemple, si on veut reconstituer l’état de contrainte le plus défavorable d’une section, il convient de vérifier que les contraintes extrêmes que l’on retient pour les fibres supérieure et inférieure sont bien concomitantes.
Penser également à baser l'analyse des résultats, non seulement sur les sollicitations les plus défavorables avec leurs concomitances, mais aussi sur les sollicitations concomitantes qui génèrent les états de contraintes les plus défavorables. Un effort normal maximal associé à un moment concomitant petit peut ainsi générer des effets moins défavorables qu'un effort normal un peu plus petit, mais associé à un moment plus grand.
Pour la vérification d’une section, il est acceptable dans des phases très amont de faire la vérification avec tous les efforts extrêmes dans un même torseur ; mais en phase d’exécution, pour des questions d’optimisation, il convient de récupérer des torseurs d’efforts concomitants.
D.2.3 Attention aux combinaisons automatiques !
L’utilisation des combinaisons d’actions est différente entre le bâtiment et les ouvrages d'art.
Dans le bâtiment, les cas de charges élémentaires induisent de très nombreuses positions possibles qui doivent toutes être explorées pour déterminer les effets maximaux sur chaque élément de structure. Cette multiplicité de charges et de configurations amène très naturellement à l’utilisation de modules de combinaisons automatiques.
De manière générale, l’utilisation des modules de combinaisons automatiques proposés par la plupart des logiciels doit être assortie de précautions particulières car c’est une source fréquente d’erreurs. Certains modules relèvent de la boite noire et tous les logiciels ne permettent pas de savoir directement quels sont les cas de charge élémentaires dimensionnants dans les combinaisons enveloppes.
De plus, la vérification et le codage des combinaisons est un exercice fastidieux et il est difficile de détecter une erreur.
Une des méthodes les plus efficaces pour se prémunir des erreurs liées aux combinaisons et enveloppes consiste à faire l’exercice de décorticage des efforts et contraintes dimensionnants. Il s’agit pour quelques efforts ou contraintes clés de la structure (moment de flexion maximum, contraintes extrêmes) de retrouver la participation de chaque cas de charge élémentaire dimensionnant dans l’effort ou la contrainte globale. On peut ainsi vérifier qu’il n’y a pas d’erreur dans les cumuls et les coefficients et que les cas de charge « logiques » sont bien dimensionnants.
Pour le bâtiment, le même exercice peut être fait sur les réactions d’appui.
$translationBooksD.3 Exploitation des résultats
D.3 Exploitation des résultats
D.3.1 Contraintes/déformations ou efforts internes
L’important est de définir ce que l’on recherche avant de se lancer dans les calculs, et ceci dépend du type d’étude :
-
pour des ouvrages d’art modélisés en poutre simple, on privilégiera l’exploitation des efforts internes ;
-
pour des bâtiments de génie civil, l’approche en contrainte permet d’appréhender le fonctionnement global de la structure en repérant les différentes zones. En revanche, quand l’objectif pour ces bâtiments est d’obtenir des résultats de ferraillage (quantité ou contraintes internes), il est nécessaire d’exploiter les efforts internes et d’effectuer les calculs correspondant dans un second temps.
D.3.2 Valeurs aux nœuds, valeurs aux points de Gauss ou valeurs au centre
Voir également A.2 Qu’est-ce qu’un élément fini ?
Le logiciel calcule les valeurs des contraintes et des déformations en général aux points de Gauss, dont la position est définie dans la notice du logiciel relative aux éléments finis. Il peut en déduire la valeur au centre de l’élément. Il extrapole à chaque nœud et, comme un nœud est forcément lié à plusieurs éléments, il moyenne les valeurs obtenues à partir de chaque élément.
Dans les zones régulières, et avec un maillage adapté au paragraphe C.3 , les valeurs au centre, aux nœuds ou aux points de Gauss sont très proches.
La question se pose à l’approche du pic, où il faut une réflexion sur la valeur la plus représentative.
Type de valeurs affichées
La plupart des logiciels calculent les sollicitations aux points d’intégration (ou points de Gauss). Mais il existe deux façons de les visualiser :
-
soit aux éléments – Cette première façon consiste à tracer directement la valeur moyenne sur chaque élément ; valeur moyenne des valeurs calculées aux points d’intégration de l’élément. Le tracé de la sollicitation présente alors des discontinuités d’autant plus marquées que la discrétisation n’est pas bien adaptée à la zone observée. Les résultats affichés au centre des éléments sont fiables ;
-
soit aux nœuds – Cette seconde façon consiste à afficher les valeurs moyennes aux nœuds. Pour chacun des nœuds, la valeur calculée est la valeur moyenne pondérée des sollicitations issues des éléments sélectionnés adjacents au nœud. Ce traitement, appelé lissage (*), est destiné à afficher un champ continu ce qui peut apparaître plus pertinent.
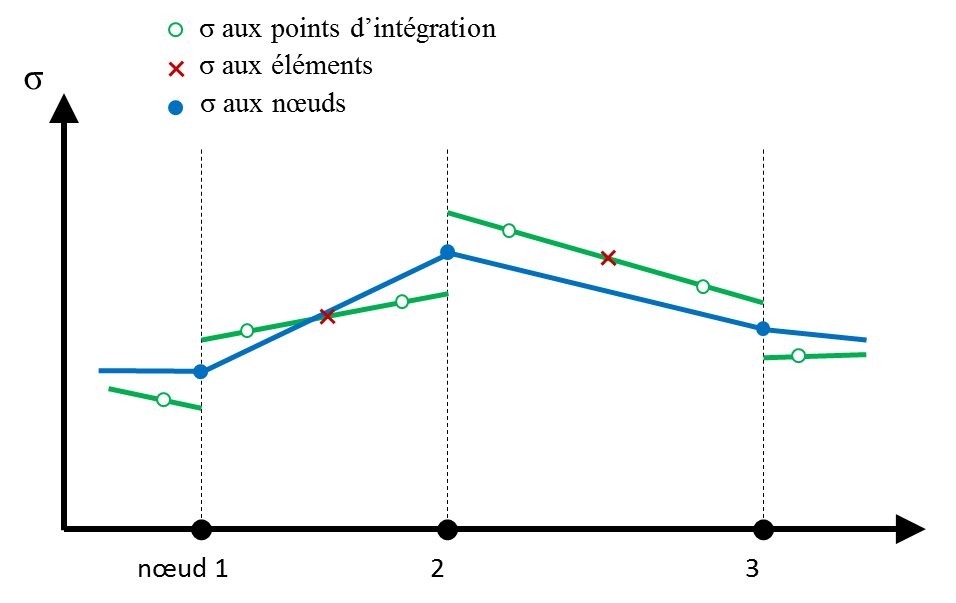
Champ de contraintes – Principe de calcul des valeurs affichées
(*) ne pas confondre cette action de lissage avec les lissages décrits aux paragraphes D.5 et D.6 qui consistent à moyenner des efforts sur une longueur donnée.
Sur la figure ci-après, les sollicitations calculées aux points d’intégration ont été extrapolées aux nœuds avant de procéder à la moyenne. C’est ce qu’effectuent par défaut certains logiciels.
Nous pouvons l'illustrer à partir de l'exemple de la roue Br (Exemple D - Cas simple : modélisation d'une roue Br). Le logiciel utilisé ne donne pas accès aux valeurs aux points de Gauss.
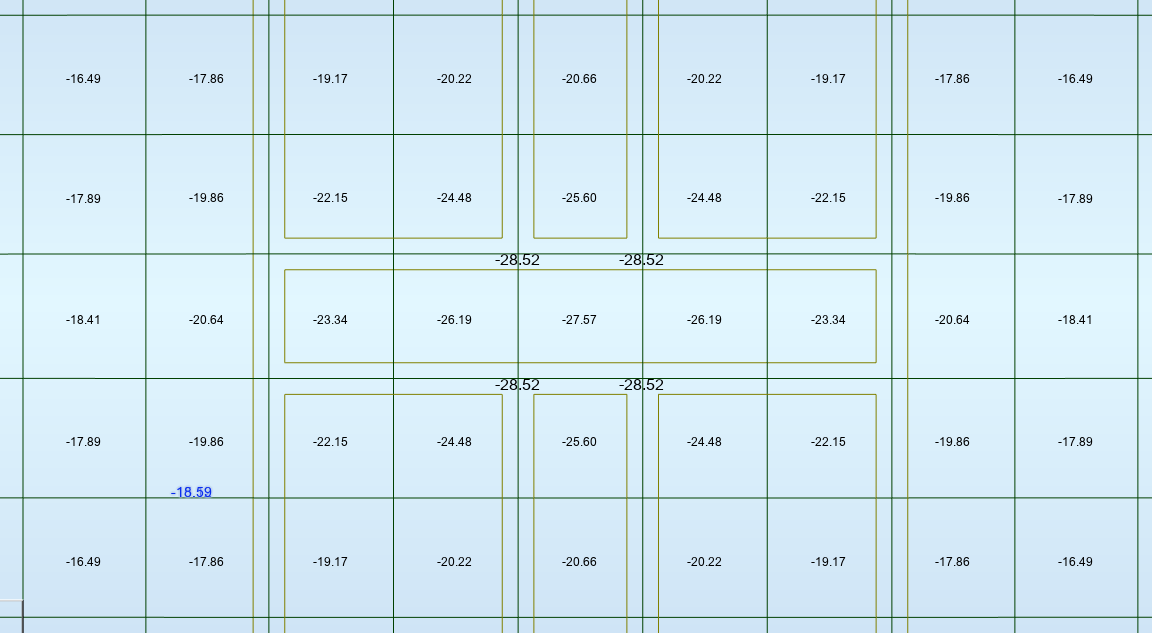
Cartographie des moments transversaux - valeurs au centre des dalles - vue d'ensemble
(28.52 kN.m/m est une valeur extrême du calcul)
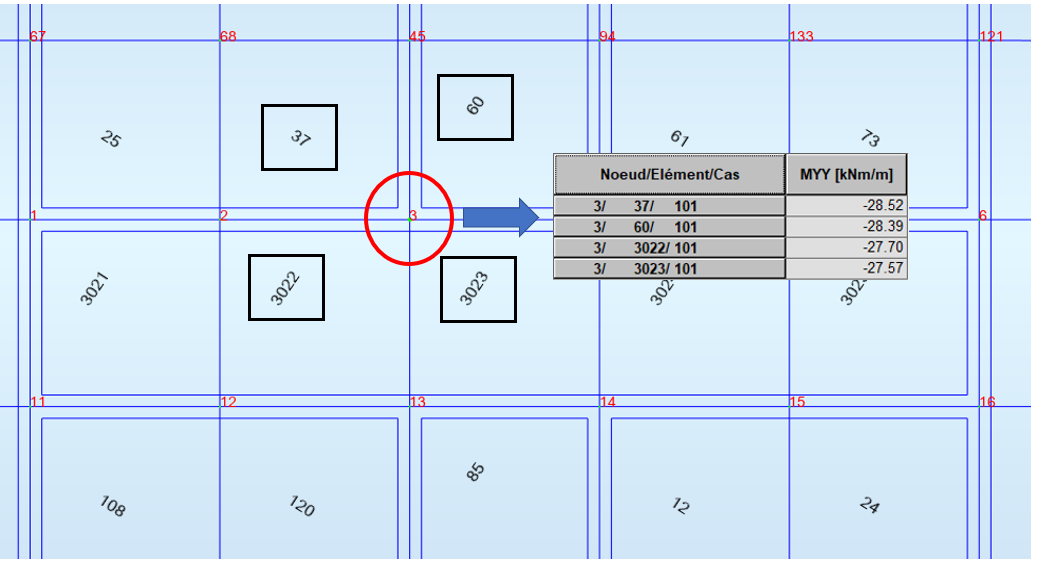
Valeurs au noeud 3 - elles sont différentes suivant l'élément fini de lecture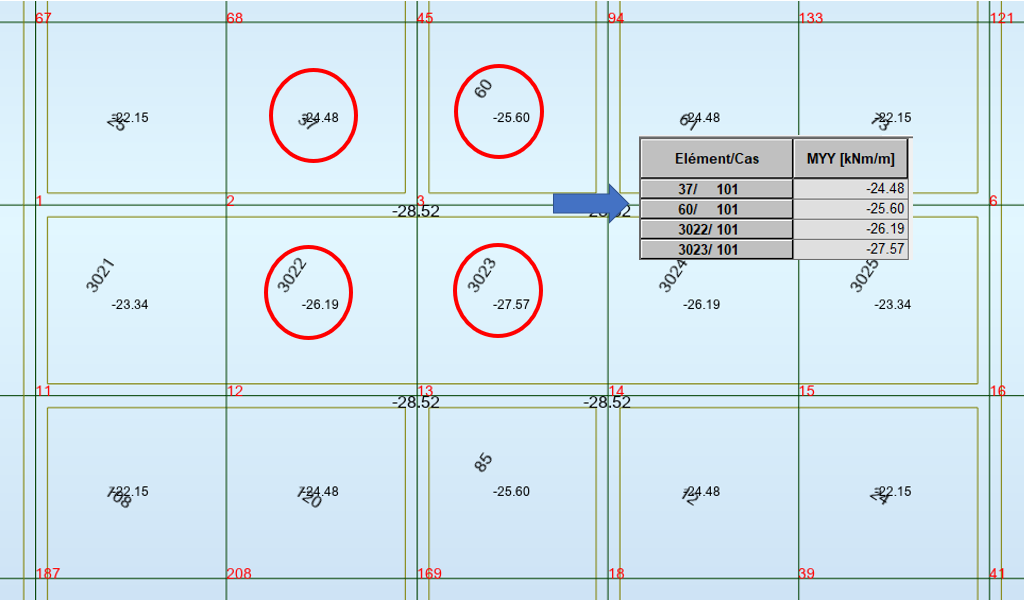
Valeurs au centre des éléments - Zoom
La documentation propre à chaque logiciel doit renseigner sur sa façon de gérer l’affichage des sollicitations et sur les options proposées. Un logiciel peut proposer par défaut que la partie linéaire du résultat du point d’intégration soit extrapolée au nœud alors que la partie non-linéaire (déformation plastique par exemple) soit copiée. Et une option de ce même logiciel peut permettre de copier les parties linéaire et non-linéaire aux nœuds.
On verra plus loin au paragraphe D.5 les variations importantes qui peuvent être liées à des lissages sur les noeuds ou sur les éléments.
D.3.3 Analyse des sollicitations – Repérage des zones sensibles
Pour donner suite aux précisions ci-avant, l’affichage des sollicitations aux éléments permet de mieux visualiser les zones de forte discontinuité. Dans les structures métalliques, on affiche généralement la contrainte équivalente de Von Mises ce qui permet d’avoir une idée des zones fortement sollicitées et/ou présentant un fort gradient de contraintes. On peut également afficher l’énergie interne de déformation de chaque élément. Dans les structures en béton armé, on affiche soit les contraintes, soit les cartographies d’aciers qui permettent de visualiser les zones fortement sollicitées.
$translationBooksD.4 Validations réglementaires : comportement en béton armé des éléments
D.4 Validations réglementaires : comportement en béton armé des éléments
D.4.1 Cartographies d’acier – calcul règlementaire BA / bielles
Les calculs des cartographies d’aciers sont réalisés par les logiciels courants en utilisant généralement la méthode de Capra Maury (Annales de l'ITBTP de décembre 1978) ou la méthode de Wood et Armer (The reinforcement of slabs in accordance with a predetermined field of moments » Concrete février 1968, Aout 1968).
Ces méthodes permettent de déterminer les 4 sections d’aciers Axi, Ayi, Axs, Ays sur les faces inférieures et supérieures d’un élément en fonction des 2 directions de ferraillage considérées orthogonales X et Y.
Une bonne approche du calcul de ces cartographies peut être faite à partir de la méthode de Wood en la simplifiant :
Soit un élément soumis aux composantes d’efforts suivantes :
-
Nxx, Nyy, Nxy efforts de membrane (positif si traction) ;
-
Mxx, Myy, Mxy efforts de flexion.
La première étape est de calculer les efforts intermédiaires suivants :
-
Nwx = Nxx + |Nxy| ;
-
Nwy = Nyy + |Nxy| ;
-
Mwx = Mxx + |Mxy| si Mxx est positif sinon Mwx = Mxx - |Mxy| ;
-
Mwy = Myy+ |Mxy| si Myy est positif sinon Mwy = Myy- |Mxy|.
D.4.2 Éléments en flexion : dalles
Les dalles sont principalement sollicitées par les efforts de flexion Mxx, Myy, Mxy.
Les efforts de membranes Nxx, Nyy, Nxy sont souvent négligeables.
Les moments Mxy peuvent être importants, ils sont nuls dans les zones où les moments principaux sont alignés avec les axes principaux (généralement confondus avec les directions du ferraillage) donc en milieu de travée et sur les appuis continus.
Il ne faut pas les négliger surtout dans les angles des dalles et dans le cas de charges concentrées.
Les calculs des aciers passifs réalisés dans la détermination de cartographies sont conformes aux règles de l’Eurocode, car ils se ramènent à l’étude d’une section rectangulaire soumise à un couple de chargement (N, M), ils peuvent donc être réalisés à l’ELS et à l’ELU.
Le calcul des aciers à l’ELS en prenant en compte les ouvertures des fissures est plus délicat et nécessite l’emploi d’un logiciel éprouvé. En effet, la présence des moments MXY nécessite des calculs d’aciers sur plusieurs facettes car la fissuration ne se produit pas nécessairement selon les directions des ferraillages.
Le comportement des dalles en flexion étant conforme à celui des poutres, il est nécessaire de réaliser un décalage des courbes de moment pour respecter le fonctionnement en treillis.
Les sections d’aciers Ax sont calculées directement à partir du couple d’efforts (Nwx, Mwx) et les armatures Ay à partir de (Nwy, Mwy)
Exemple : Dalle carrée de 5 m de côté
La dalle est articulée sur 3 côtés et encastrée sur le 4ème, elle est soumise à une charge permanente uniforme de 50 kN/m², son épaisseur est de 20 cm, l’enrobage des aciers de 3 cm.
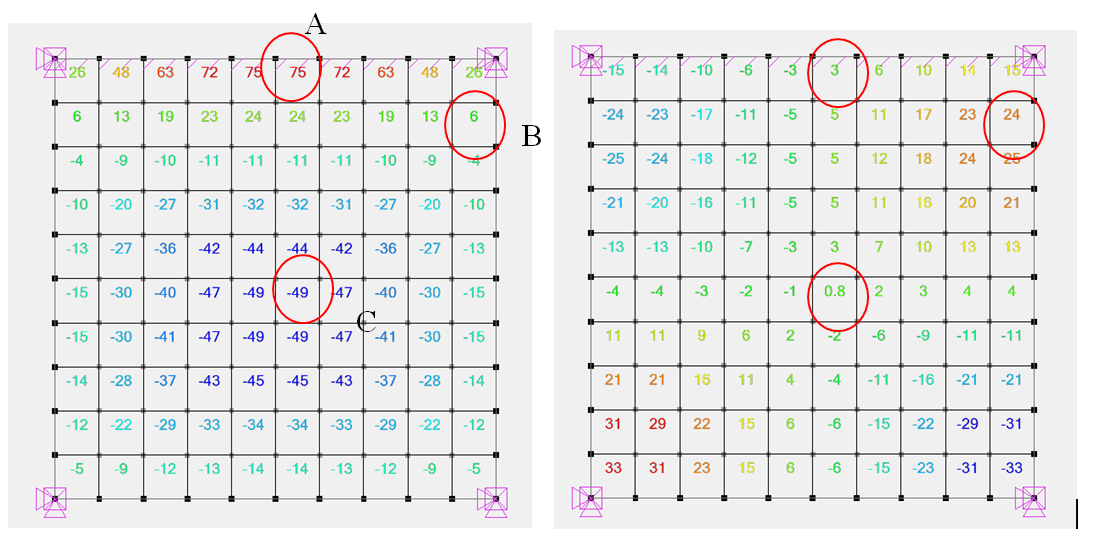
Moments d’axe horizontal MYY | Moments croisés MXY
Les aciers Ay sont calculés manuellement avec fyd=200 MPa (ELS).
| sections : | A | B | C |
| MYY | 75.0 kN.m | 6.0 kN.m | -49.0 kN.m |
| MXY | 3.0 kN.m | 24.0 kN.m | 0.8 kN.m |
| MYY+MXY | 78.0 kN.m | 30.0 kN.m | -49.8 kN.m |
| Ay manuel | 25 cm2 | 10 cm2 | -16 cm2 |
| Ay logiciel | 25 cm2 | 9 cm2 | 17 cm2 |
Ay manuel = 10 x (MYY + MXY)/(0.9 x 0.17 x 200) cm2
Valeurs qui peuvent être comparées avec les sections d’aciers calculées par le logiciel :
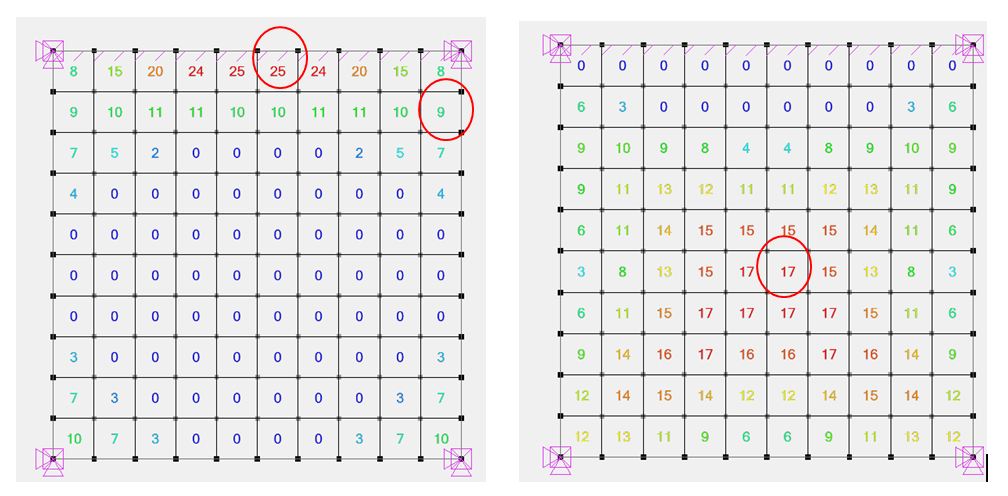
Aciers Ays logiciel / Aciers Ayi logiciel
Il y a une bonne concordance entre les sections d’aciers calculées manuellement et celles déterminées par le logiciel (méthode de CAPRA MAURY).
Il s’en déduit que les moments Mxy se cumulent avec les Moments Mxx et Myy.
D.4.3 Éléments en cisaillement dans leur plan : voiles
Les voiles de contreventement d’un bâtiment sont soumis à des efforts normaux et à des efforts de cisaillements dans leur plan.
Ce sont par exemple les « murs de grandes dimensions en béton peu armé » étudiés dans l’EC8-1 chapitre 5.4.3.5., ou des dalles de transfert de bâtiment soumises à des efforts horizontaux (poteaux inclinés).
Pour ces éléments, les composantes Mxx, Myy, Mxy, Vxz et Vyz sont très faibles voire nulles.
Ils ne sont soumis qu’à des efforts de membrane Nxx, Nyy, Nxy :
-
Nxx et Nyy étant les efforts de traction/compression selon les axes x et y ;
-
Nxy le cisaillement dans le plan du voile.
En reprenant le calcul précédent des cartographies d’aciers, cela donne :
-
Nwx = Nxx + |Nxy| ;
-
Nwy= Nyy + | Nxy|.
D’où les armatures :
-
Ax = (Nxx + |Nxy|)/fyd ;
-
Ay = (Nyy + |Nxy|)/fyd ;
-
Ax et Ay étant la somme des armatures suivant X et Y (2 faces comprises) ;
-
et fyd la contrainte de calcul des aciers.
Ces formules amènent à la constatation que si les efforts normaux sont nuls (Nxx=Nyy=0), alors les armatures Ax et Ay sont des armatures de cisaillements et leurs valeurs sont égales à : Ax= |Nxy|/fyd et Ay= |Nxy|/fyd
Le cisaillement nécessite donc des armatures dans les deux directions, contrairement aux calculs classiques de cisaillement réalisés selon l’EC2. Cela est dû à la non-prise en compte de la résistance du béton.
Les armatures de cisaillements calculées par les cartographies sont donc « supérieures » à celles calculées habituellement en utilisant l’EC2.
On se référera à l’article 5.4.3.5.2 de l’EC8-1 qui concerne l’étude des « murs de grandes dimensions en béton peu armé » qui autorise dans un tel cas de ne pas disposer d’armatures d’effort tranchant si Ved est inférieur à Vrdc.
Il est donc recommandé dans ces cas de n’utiliser les cartographies d’aciers que pour prendre en compte les effets locaux, et de réaliser les calculs des armatures principales en effectuant des coupures à la base des voiles et de déterminer les ferraillages à partir des torseurs résultants au niveau de ces coupures.
Exemple d’un voile :
Etudions un voile isolé de 5 m de hauteur, 4 m de largeur et 20 cm d’épaisseur.
Il est appuyé à sa base, et soumis à une charge horizontale sismique de 2000 kN en tête.
Afin d’éviter les pics d’efforts, la charge horizontale est linéarisée sur la largeur du voile (500 kN/ml).
Voici ci-dessous les efforts de membranes résultants Nxx, Nyy et Nxy.
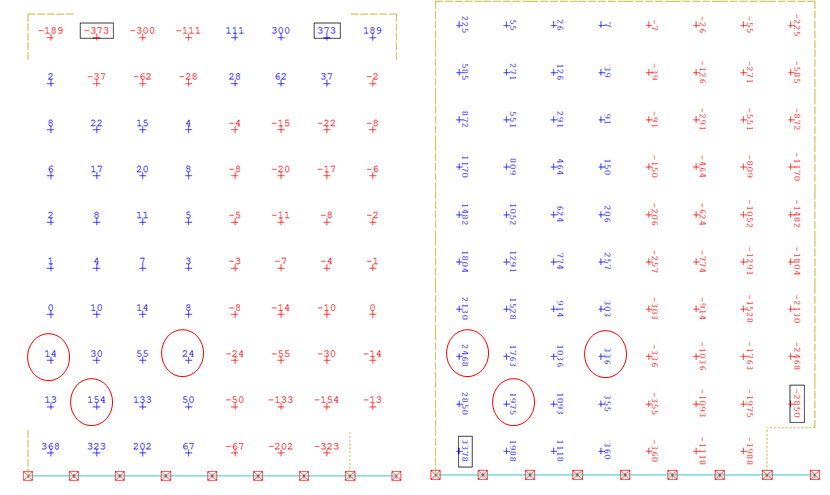
Efforts Nxx (horizontaux)(kN/ml) - Efforts Nyy (verticaux) (kN/ml)
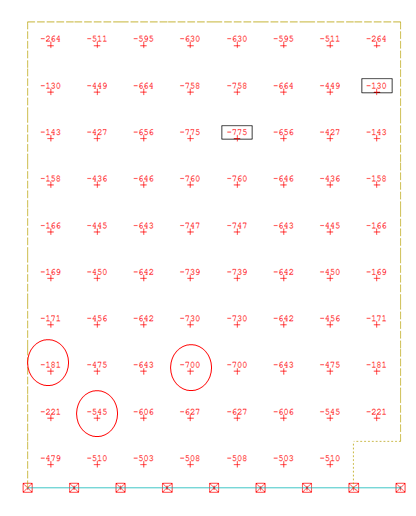
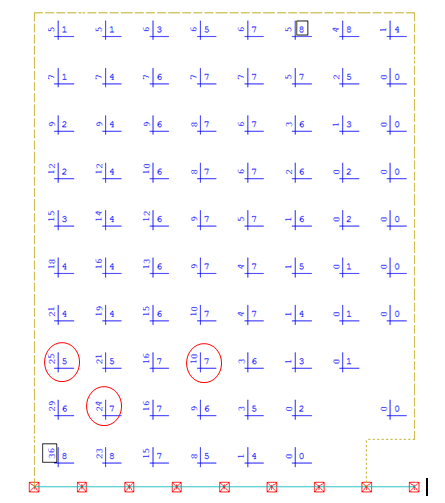
Efforts Nxy (cisaillement) - Cartographies d’aciers (cm²/m²) pour une nappe
Les sections d’aciers sont calculées manuellement et comparées avec les valeurs des cartographies.
| sections : | A | B | C |
| NXX | 14 kN | 154 kN | 24 kN |
| NYY | 2468 kN | 1975 kN | 336 kN |
| NXY | 181 kN | 545 kN | 700 kN |
| NXX+NXY | 195 kN | 699 kN | 724 kN |
| (Axi+Axs) manuel | 4 cm2 | 14 cm2 | 14 cm2 |
| (Axi+Axs) logiciel | 10 cm2 | 14 cm2 | 14 cm2 |
| NYY+NXY | 2649 kN | 2520 kN | 1036 kN |
| (Ayi+Ays) manuel | 53 cm2 | 50 cm2 | 21 cm2 |
| (Ayi+Ays) logiciel | 50 cm2 | 48 cm2 | 20 cm2 |
Ce tableau montre que d’une part le calcul manuel fournit une bonne approximation des sections d’aciers et d’autre part que les efforts de cisaillement Nxy se rajoutent aux deux efforts de membranes Nxx et Nyy, ce qui ne traduit pas la réalité du fonctionnement en béton armé du voile.
Étude réglementaire du voile :
Le voile se recalcule réglementairement selon l’EC2.
Au niveau d’une coupure à la base du voile, les efforts résultants sont égaux à :
-
M-flexion = 2000 x 5 = 10 000 kN.m ;
-
Vu = 2000 kN (ELA).
D’où les aciers de flexion : A-tirant = 10 000 /(0.9 x 3.9 x 50) = 57 cm2 soit 29 cm2 par nappe.
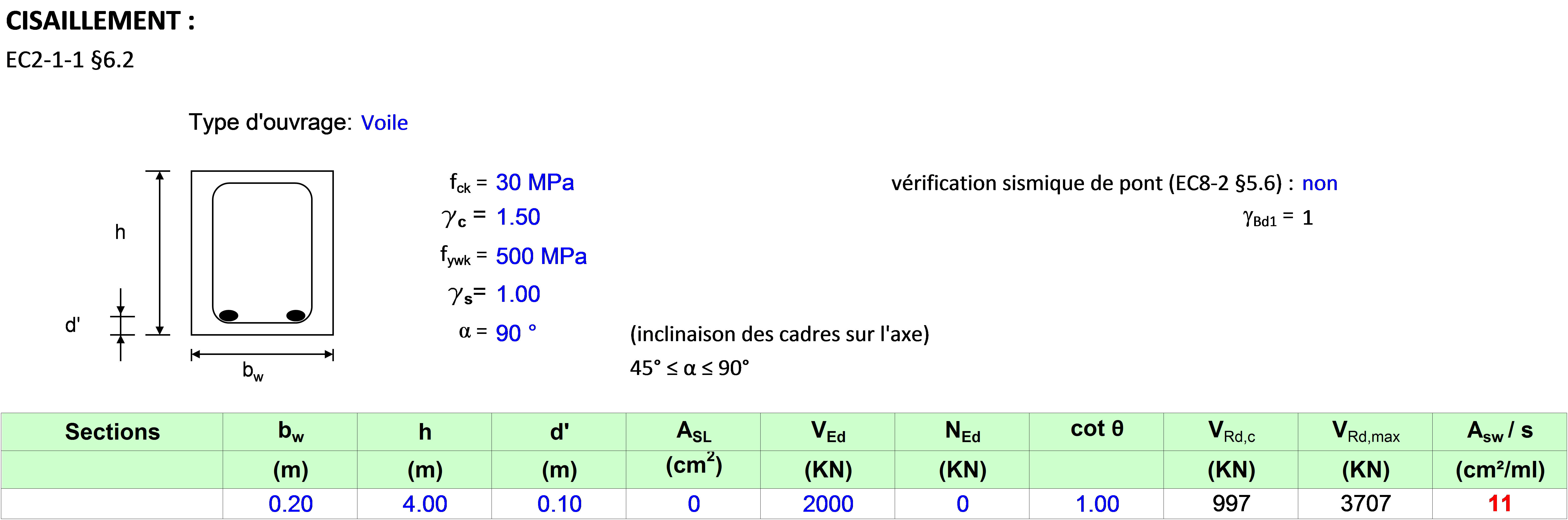
Vrdc = 997 kN est inférieur à Vu = 2000 kN d’où la nécessité de disposer des armatures de cisaillement égales à 11 cm2/ml (soit 6 cm2/ml par nappe) en considérant cot(θ)=1 ou 5 cm2/ml avec cot(θ)=2.5.
Comparaison entre les 2 méthodes :
Les aciers de flexion sont plus importants dans les cartographies car il faut disposer (36+23+15) cm2/ml x 0.5 m= 37 cm2 pour 29 cm2 dans le calcul réglementaire (30% de supplément).
En ce qui concerne les cisaillements , il faut disposer 7 cm2/ml avec les cartographies alors que le calcul réglementaire permet de ne disposer que 2.5 cm2/ml en considérant cot(θ) =2.5.
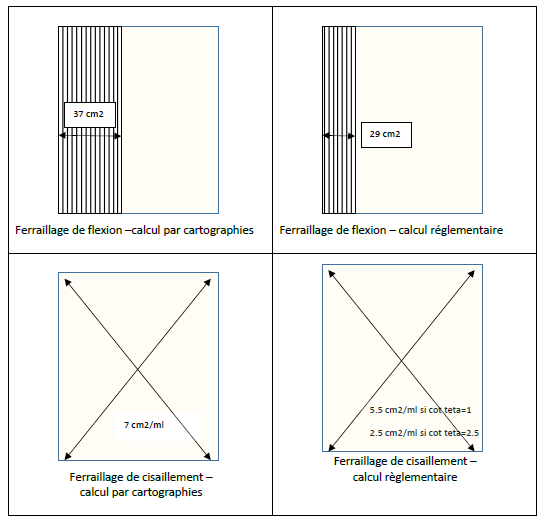
Récapitulatif de la comparaison du calcul d’un voile soit par les cartographies d’aciers soit
par la méthode réglementaire béton armé (EC2)
D.4.4 Méthode des coupures
La majorité des logiciels permettent de réaliser des coupures sur des éléments afin de calculer des torseurs résultants en leurs centres.
Prenons l’exemple de l’étude de la base d’un voile :
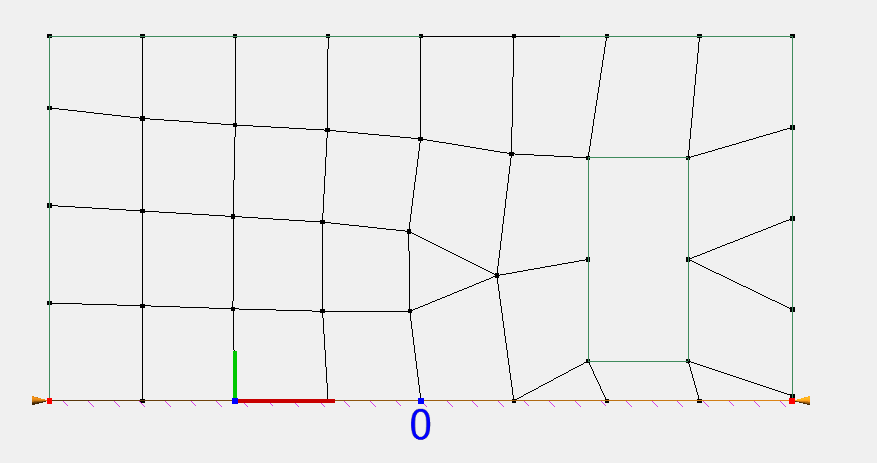
La coupure horizontale au point 0 en base du voile permet d’obtenir le torseur résultant constitué par l’effort normal, le tranchant et le moment (dans le plan ou hors plan), par intégration des contraintes.
Le ferraillage peut alors être déterminé par un calcul type poutre, ce qui implique de s’assurer de rester dans le domaine de définition d’un élément poutre.
L’utilisation des coupures est avant tout très utile à l’ingénieur pour quantifier les cheminements des efforts dans une structure.
D.4.5 Domaine de validité des cartographies d’aciers
D.4.5.1 Cartographies et coupures
Les cartographies d’aciers résultent d’un calcul numérique effectué pour chaque élément indépendamment des autres, donc sans prendre en compte le comportement global en béton armé de la structure.
Nota : La méthode des coupures est la seule respectant le fonctionnement des voiles en béton armé et considérée comme réglementaire. Les compléments usuels sont à appliquer : décalage de la courbe des moments, vérifications des bielles, chaînages et ferraillage minimal … restent à faire.
Il importe donc à l’ingénieur de valider par d’autres méthodes réglementaires les résultats obtenus.
Exemple d’une poutre voile calculé avec la cartographie :
L’exemple d’une poutre sur deux appuis est étudié ici. La poutre est modélisée comme un voile de grande hauteur, pour montrer sur un cas simple les incohérences des cartographies d’aciers.
Soit la poutre isostatique de 10 m de portée, 3 m de hauteur et soumise à une charge uniforme de 200 kN/m2. Cette poutre est modélisée en éléments de plaques travaillant dans leur plan avec un maillage 0.5 x 0.5 m².
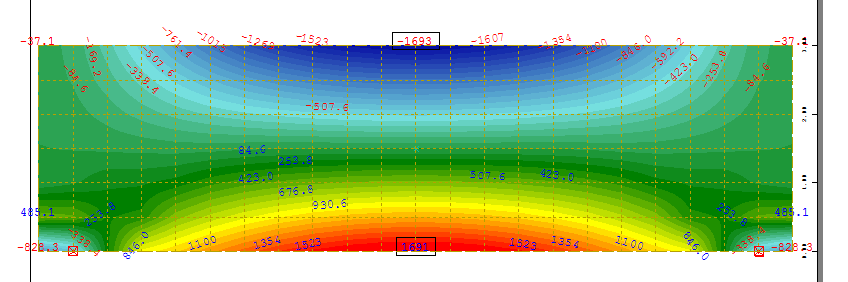
Visualisation des efforts horizontaux Fxx
Calcul du ferraillage à partir des cartographies d’aciers :
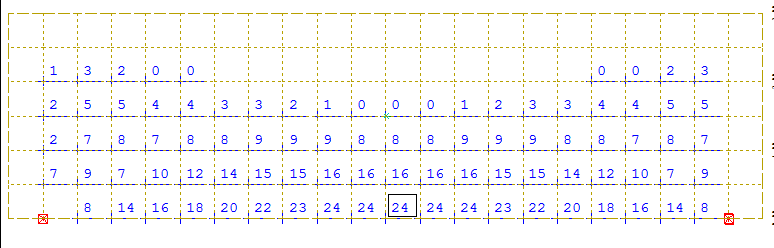
La capacité de flexion est égale à F0 x d0 = 2 nappes x 0.5 m x (24 x 2.75 + 16 x 2.25 + 8 x 1.75) = 116 cm2.m
Le ferraillage à disposer est égal à Ax = 116 cm2.m / 2.9 m = 40 cm2
Calcul du ferraillage à partir des coupures :
Une deuxième méthode consiste à réaliser une coupure au milieu de la poutre (A-A).
Le logiciel intègre les efforts Fxx sur la hauteur de la coupure pour en déduire le torseur résultant au milieu de la coupure.

Le moment au centre est égal à 3358 kN.m, (on retrouve alors le moment classique RDM Mu=1.35ql2/8 = 3375 kN.m), d’où le ferraillage calculé selon les règles du béton armé : A = 3358/(0.9 x 2.9 x 43) = 30 cm2
Conclusion et comparaison des deux méthodes :
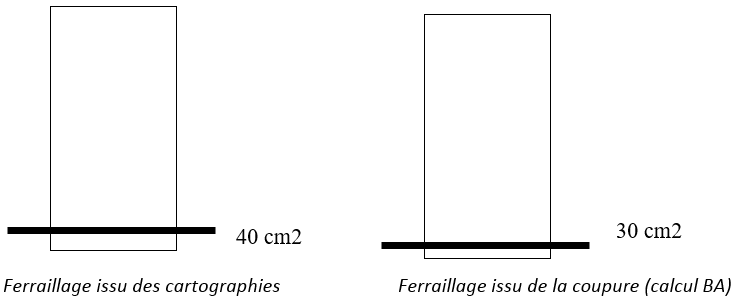
Ferraillage issu des cartographies / Ferraillage issu de la coupure (calcul BA)
Conclusion : Cet exemple montre les limites des cartographies d’acier, car la méthode ne respecte pas la règle des déformations du béton armé. La méthode des coupures permet d'optimiser les ferraillages.
D.4.5.2 Méthode des bielles: apport des éléments finis
Cas d’une poutre-voile (ou poutre cloison)
L’Eurocode 2 encourage fortement l’utilisation de la méthode des bielles, dans ce cas les éléments finis peuvent aider l’ingénieur à définir le schéma de fonctionnement des bielles ainsi que les inclinaisons des bielles. Considérons l’exemple de la poutre-voile suivante :
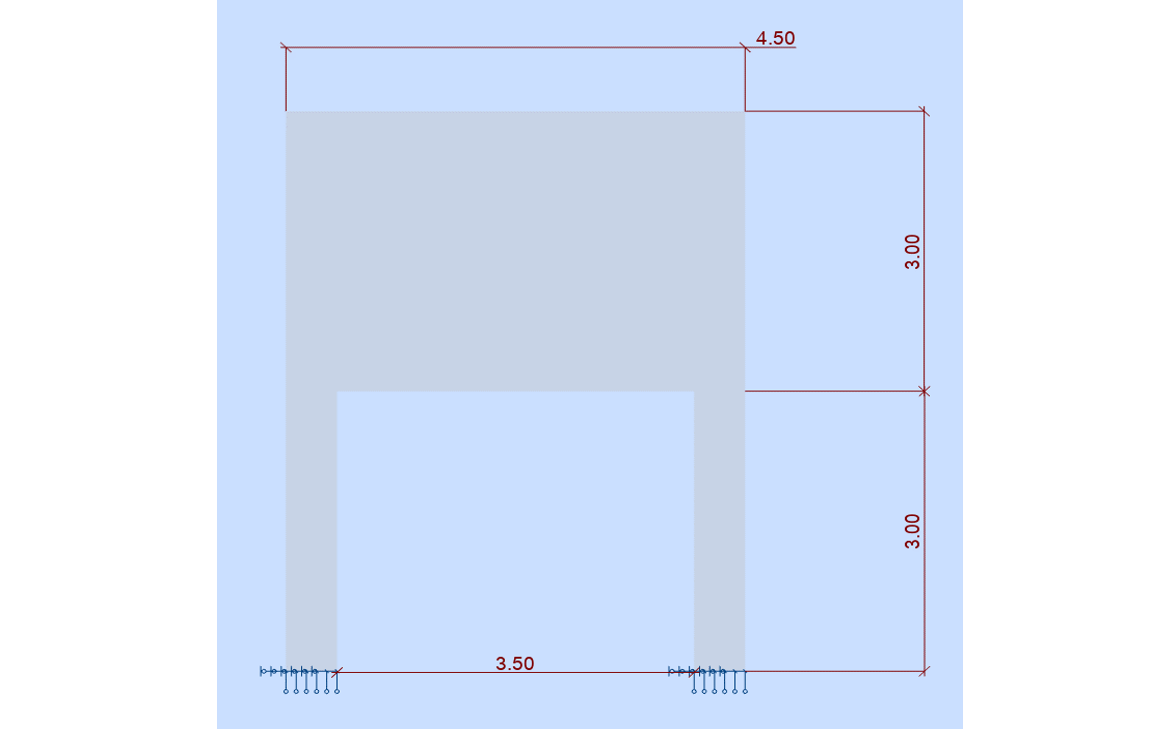
La portée de 3m50 étant inférieure à 3 fois la hauteur de la poutre, les règles classiques des poutres ne s’appliquent pas (EC2-5.3.1), ce voile se calcule par la méthode des bielles.
Cet exemple étant assez simple, nous pouvons définir manuellement le fonctionnement en bielle :
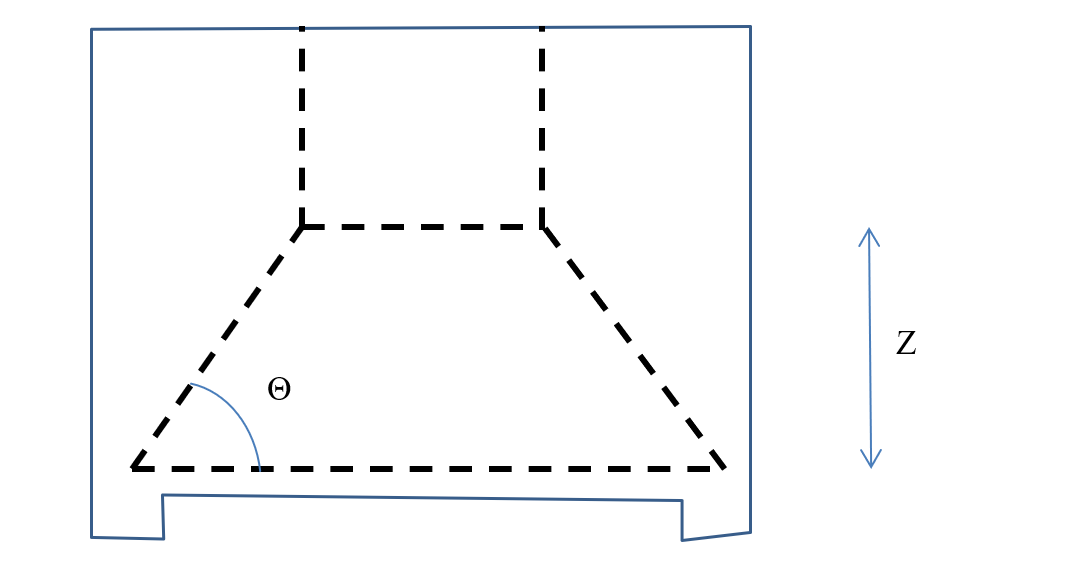
Les règles usuelles estiment la hauteur de la bielle Z à 1.90 m , nous obtenons tgt (Θ) = 2.18, soit un tirant inférieur H=515 KN , soit une section d’acier théorique A=11.8 cm² (calcul ELU).
Dans les cas plus complexes, l’ingénieur devra définir un fonctionnement en bielles qui pourra s’avérer difficile. Les éléments finis apportent alors une aide précieuse pour l’ingénieur, nous proposons à l'ingénieur de suivre la méthode suivante:
Modèle isolé représentatif :
Le principe consiste à réaliser un modèle isolé représentatif du problème.
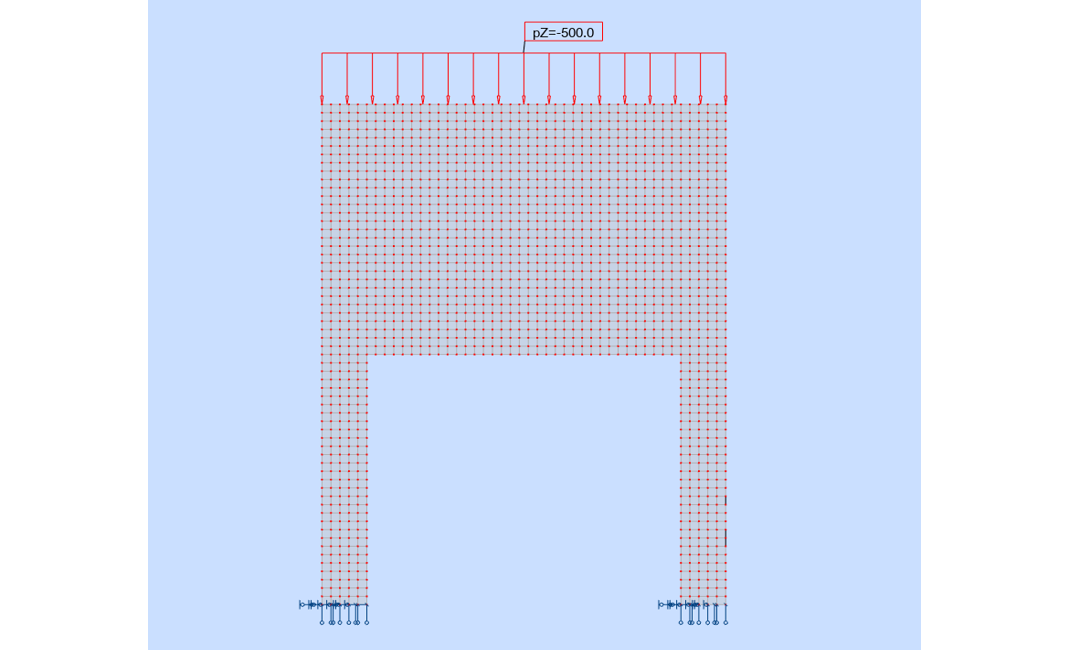
Modèle isolé représentatif
Les contraintes principales :
On se référera aussi à la partie 1 chapitre E.3.3.
Ce qu’il faut retenir : Il y a 2 contraintes principales, la mini S1, la maxi S2, elles sont représentées sous forme de flèches perpendiculaires, la longueur de chaque flèche dépendant de l’intensité de la contrainte. La contrainte S1 visualise les compressions négatives et S2 les tractions positives.
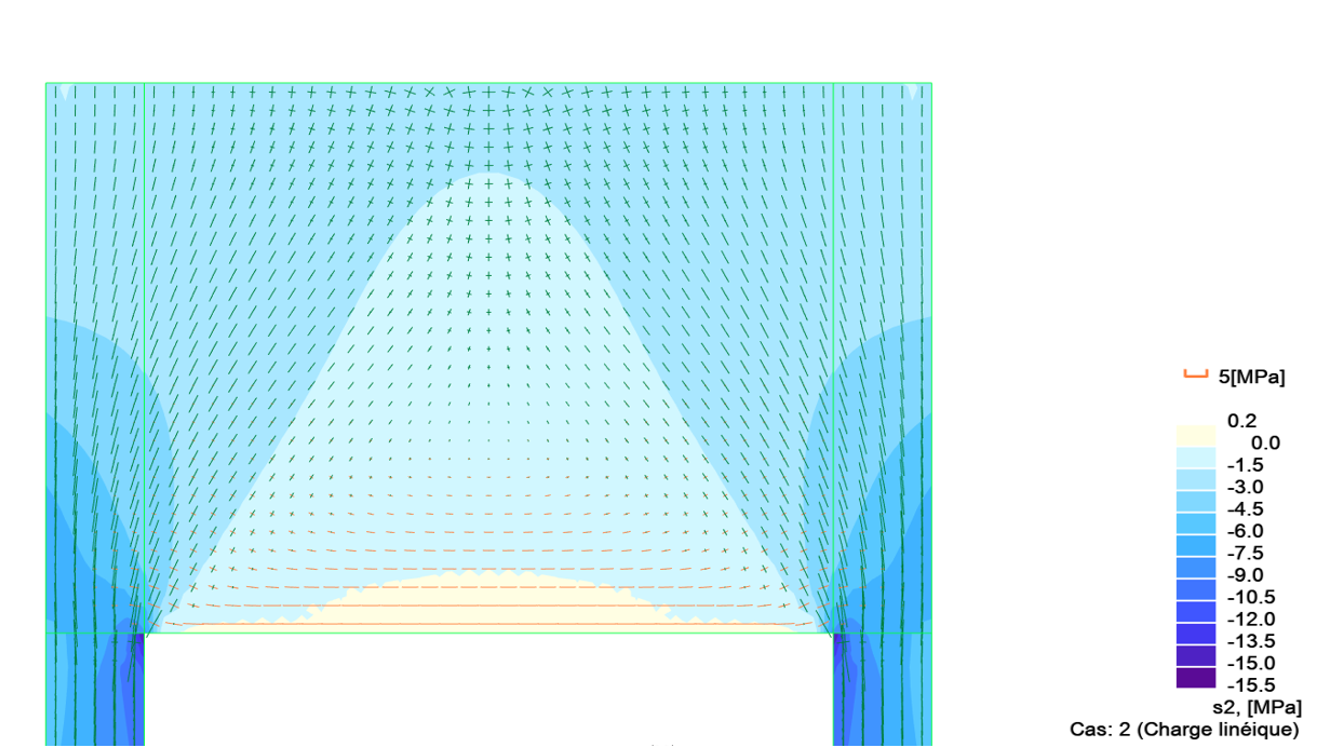
Contraintes principales S2 (compressions)
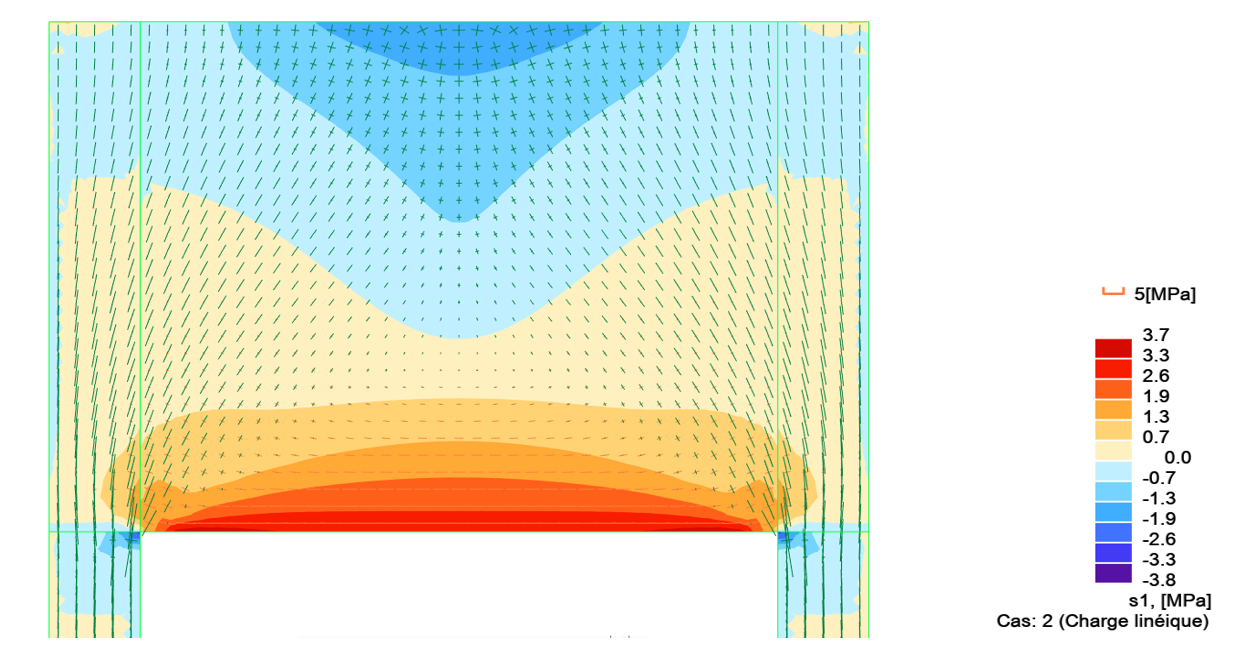
Contraintes principales S1 (tractions)
Dans notre cas, les longues flèches bleues montrent des zones de compression, les rouges montrent les zones de traction.
A savoir aussi : lorsque les 2 flèches S1 et S2 sont quasiment égales, c’est-à-dire lorsque la représentation est une croix, alors la zone est en cisaillement pur.
Définition du fonctionnement en bielles :
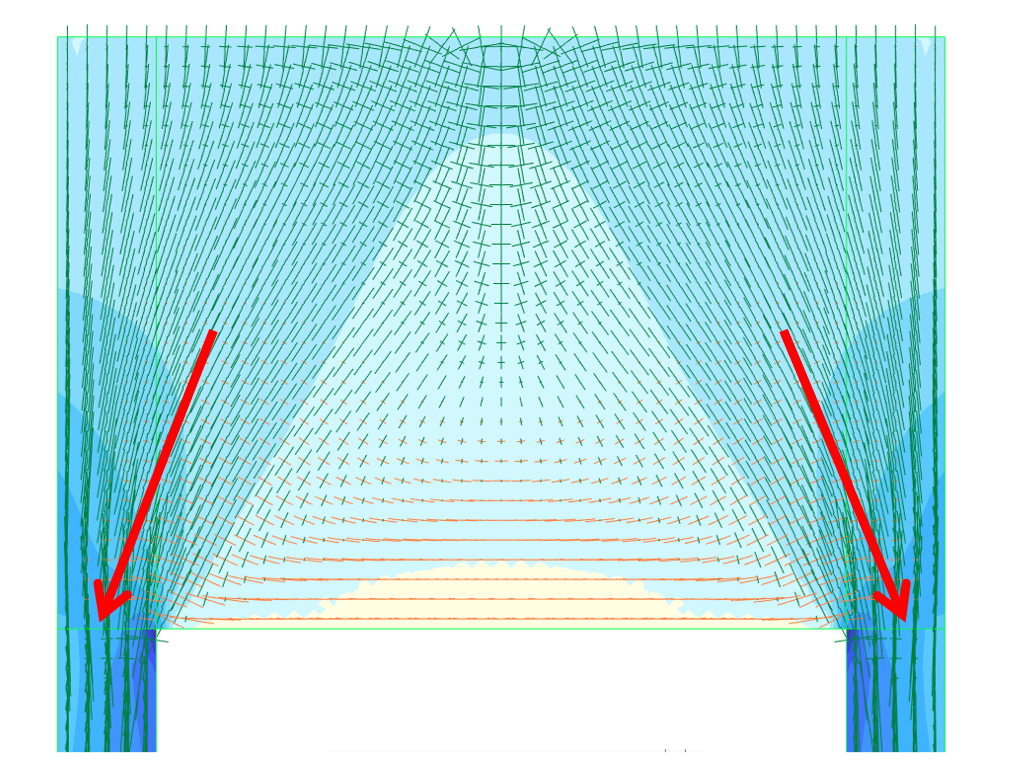
La visualisation des contraintes de compression à la base permet de visualiser la direction de la bielle, sont angle est de l’ordre tgt(Θ)= 2. Soit un tirant de 562 KN d’où une section d’acier A = 13 cm² avec quand même une incertitude due à la méthode graphique.
Cartographies d’aciers :
Les cartographies d’aciers donnent directement le ferraillage du tirant inférieur :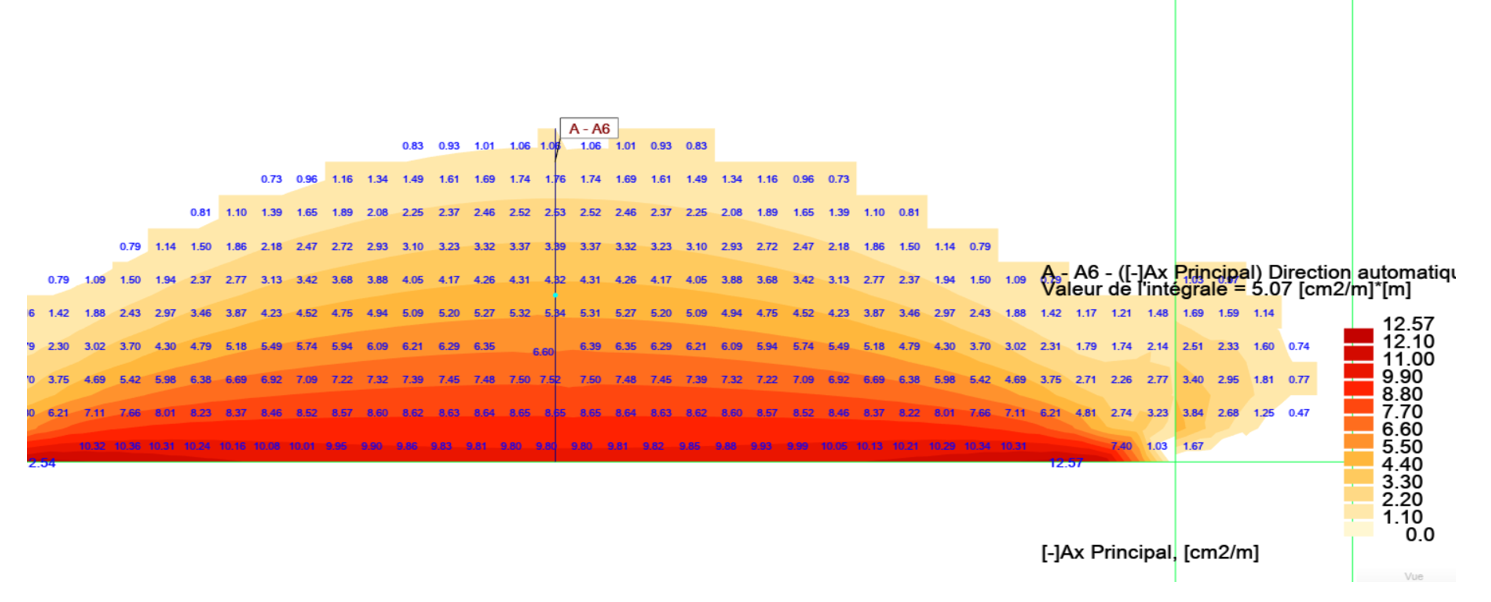
L’intégrale des sections d’acier sur 1 m donne un ferraillage de 5.07 cm² par nappe soit 10 cm² au total. Cette valeur plus précise pourra être retenue.
Bilan
Cette approche permet de bien cerner le cheminement des efforts et de monter un modèle de bielle tirant adéquat (compatible avec le cheminement des efforts).
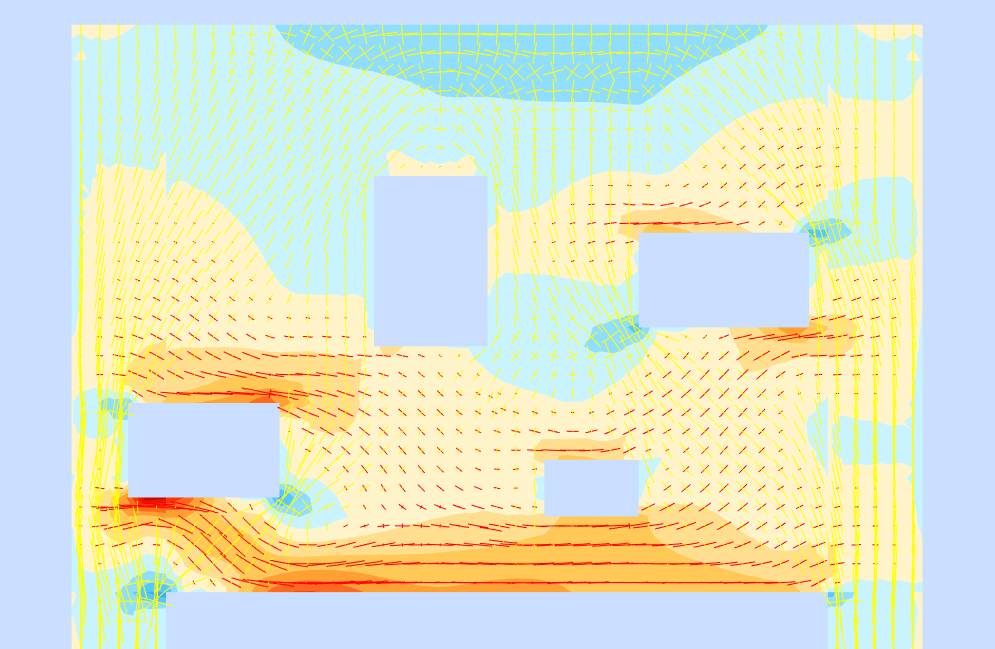
Cheminement des efforts dans le cas d'ouvertures multiples, contraintes S1
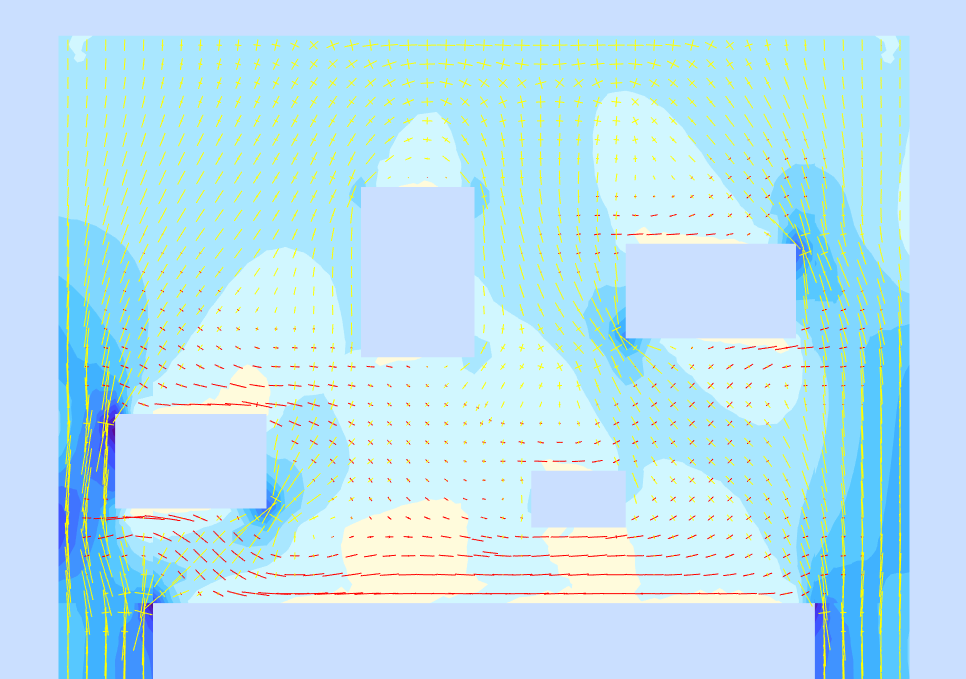
Cheminement des efforts dans le cas d'ouvertures multiples, contraintes S2
Le lecteur se reportera utilement au §8 “Strut-and-tie modelling” du bulletin n°45 de la fib pour obtenir les détails de modélisation de ce genre d'approche et au Bulletin Ouvrage d'Art n°14 du SETRA, pages 23 à 32.
$translationBooksD.5 Comprendre et analyser les pics (cas du béton)
D.5 Comprendre et analyser les pics (cas du béton)
Le lissage dont il est question dans le présent chapitre concerne l'écrêtage d'efforts ou de contraintes ou encore la répartition du ferraillage, en le moyennant, sur une certaine longueur (ou largeur) de l'élément calculé.
D.5.1 Concentration et pic de contraintes (efforts) – différents types de visualisation des efforts
D.5.1.1 Les pics de contraintes et d'efforts
Contrairement aux idées courantes, les pics de contraintes et d’efforts ne sont pas apparus avec les logiciels aux éléments finis, mais ont toujours fait partie des contraintes des ingénieurs structures, ils sont inhérents à la prise en compte d'efforts ponctuels dans le calcul des dalles.
Considérons par exemple l’étude d’une dalle isostatique infinie soumise à une charge concentrée en son centre.
Une approche possible pour calculer les efforts au centre d’une dalle est l’utilisation des abaques de Pücher.
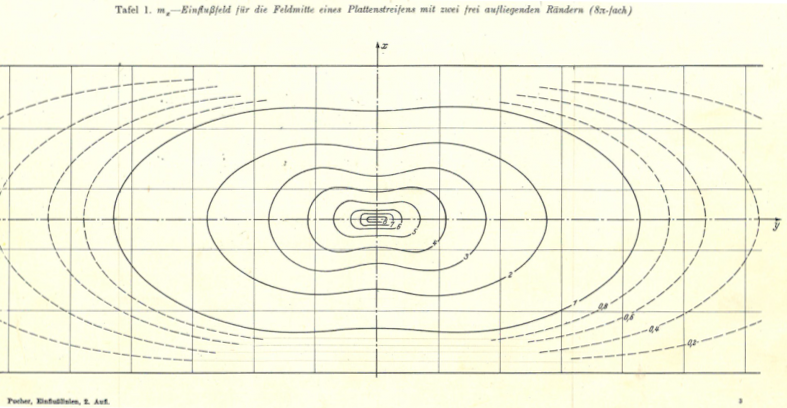
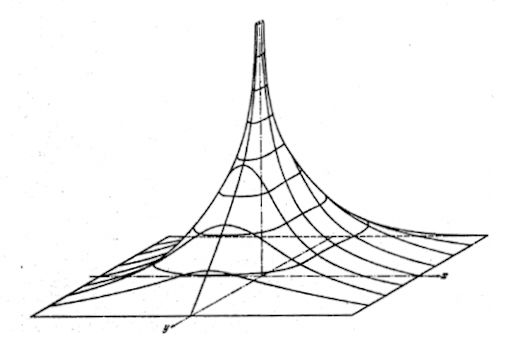
L’abaque ci-dessus (surfaces d’influence) fait apparaître un pic de moments au centre: la ligne d’influence croît rapidement lorsque la charge se rapproche du milieu de la travée : les valeurs 3 / 4 / 5 puis 6 et 7 se resserrent pour aboutir à une valeur infinie, mais correspondant à une surface tendant vers 0. Pücher a arbitrairement tronqué la représentation à la valeur de 8.
Considérons une dalle de 3 m de portée articulée sur ses côtés , soumise à une charge concentrée de 10 KN en son centre.
D'après l'abaque le moment théorique au droit de la charge est infini, ce qui n'est pas satisfaisant pour l'ingénieur devant dimensionner le ferraillage. En réalité les charges ponctuelles n’existent pas, d’autant plus que la pratique courante consiste à diffuser les charges au feuillet d’une dalle. On est alors amené à calculer des intégrales pour obtenir la valeur du moment dans la dalle (pour plus de détails, on se référera aux publications originales de Pücher).
En répartissant la charge sur un carré 20×20 cm², l'intégration des surfaces montre que le moment maximal est égal à 3.0 KN.m.
Un autre exemple de l'utilisation des abaques de Pücher est donné dans l'exemple de modélisation d'une roue Br.
Il ne faut pas oublier que les calculs sont généralement menés avec des sections brutes (coffrage) et des matériaux élastiques (comportement linéaire). En réalité, la fissuration du béton armé va conduire à une redistribution des efforts qui tend à faire diminuer ces effets de pics. Ce genre de calculs n’entrent pas (à ce jour) dans la pratique courante.
Il est par conséquent nécessaire de savoir corriger simplement, souvent manuellement, les résultats d’un calcul linéaire.
Des exemples de correction des résultats d’un calcul linéaire sont donnés ci-après.
D.5.1.2 Étude des pics par les éléments finis
Que se passe-t-il lorsque l'on calcule cette même dalle par les éléments finis ?
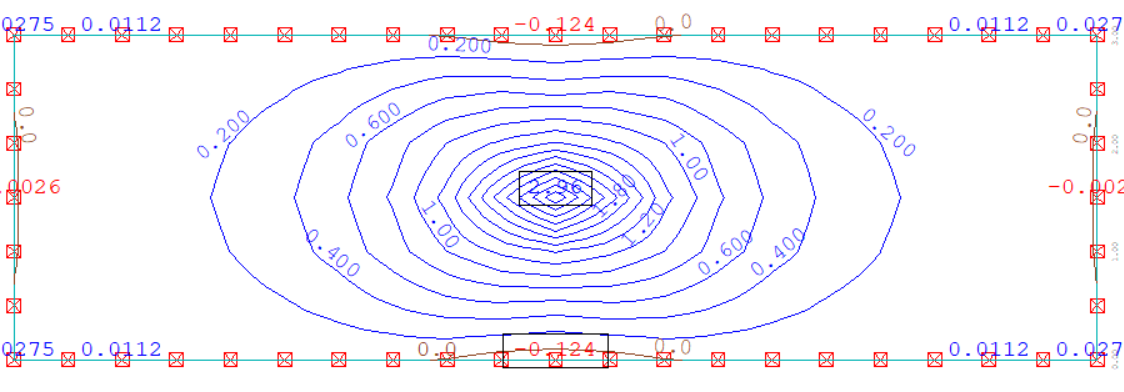
Dalle de 3 m de portée articulée soumise à une charge concentrée de 10 KN en son centre (efforts aux nœuds)
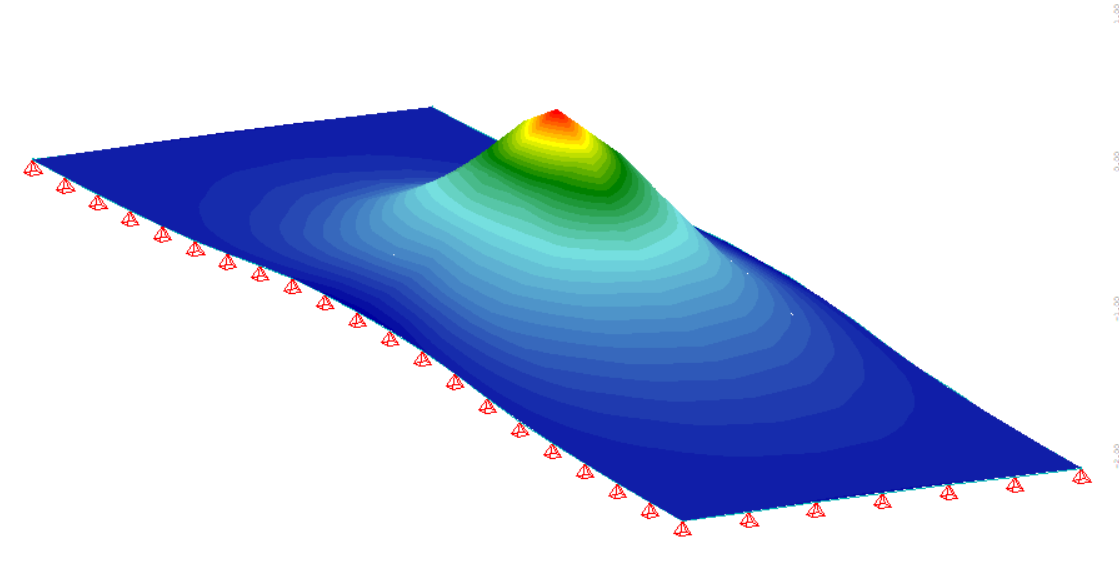 Idem en 3D
Idem en 3D
Nous constatons l’apparition d'un pic dont la valeur maximale n'est pas infinie, mais égale à 2.96 KN.m.
Nous avons vu que le logiciel calcule les efforts aux points d'intégration des éléments, pour extrapoler ensuite les résultats au centre puis sur les nœuds des éléments. un nœud étant généralement commun à 4 éléments, il y a donc 4 résultats par nœud (un pour chaque élément). Quel sera le résultat retenu ? La valeur maximale ? La valeur moyenne ? Les logiciels aux éléments finis ne proposent pas, en effet, un seul résultat pour chaque calcul, mais plusieurs selon les options choisies par l'ingénieur: ils sont capables de dresser des cartographies de résultats à partir des efforts sur les nœuds, ou bien à partir des efforts au centre des éléments, ils peuvent être lissés, non lissés, etc.
L'ingénieur doit choisir les options de visualisations avec rigueur, car les résultats varient grandement selon l'option choisie. C'est ce que nous proposons de montrer avec l'exemple ci après.
La figure précédente visualise les moments calculés sur les nœuds des éléments dont la valeur maximale est de 2.96 KN.m, elle est très proche de la valeur de 3.0 KN.m calculée manuellement.
Nous reprenons le même exemple en affichant les moments calculés au centre des éléments (au lieu des nœuds) ; le pic central est plus petit : 1.92 KN.m pour 2.96 KN.m précédemment. Ce résultat est également éloigné de la valeur calculée manuellement de 3.0 KN.m.
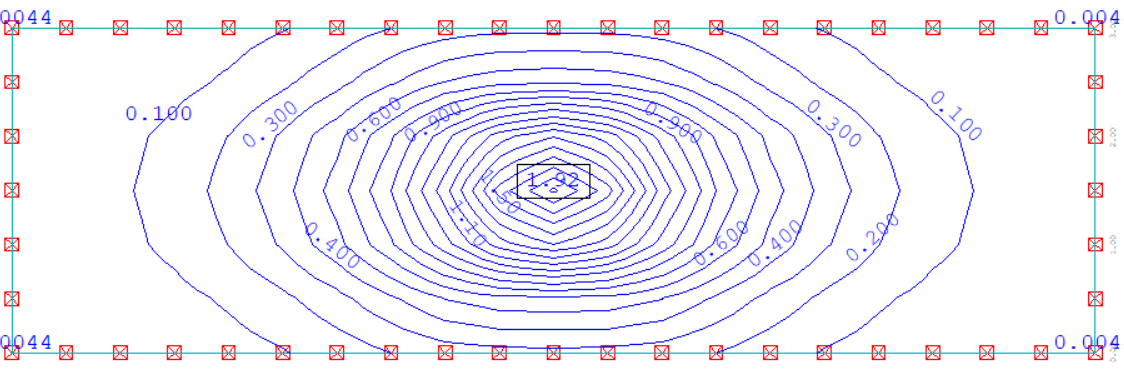
Dalle de 3 m de portée articulée soumise à une charge concentrée de 10 KN répartie sur 20×20 cm² en son centre (efforts au centre des éléments)
La représentation ci après de la courbe des moments sur une coupe au milieu de la dalle permet de comprendre ces différences.
a) Efforts aux nœuds
Ci-dessous la courbe des moments Myy calculés par lissage sur les nœuds
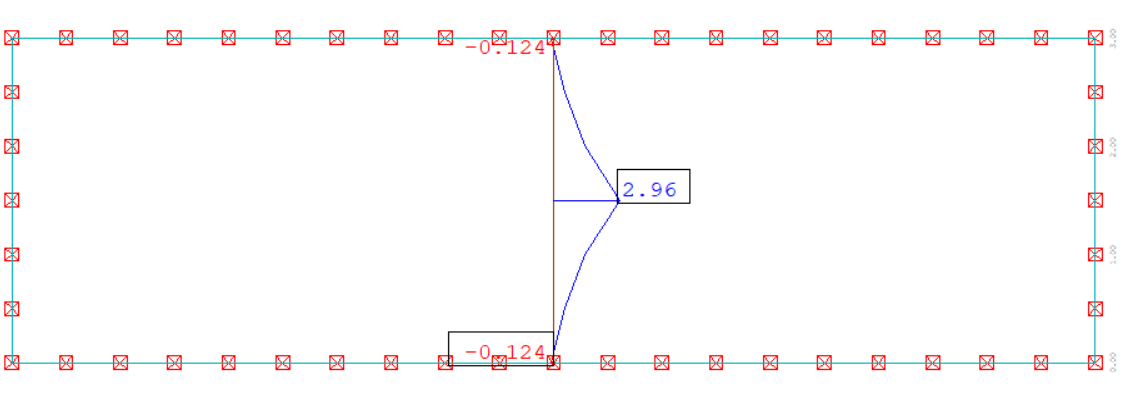
Les efforts sont calculés dans les points d’intégration des éléments puis extrapolés sur les nœuds.
Le moment maximal est de 2.96 KN.m au centre de la dalle conforme au calcul manuel.
b) Efforts non lissés sur les éléments
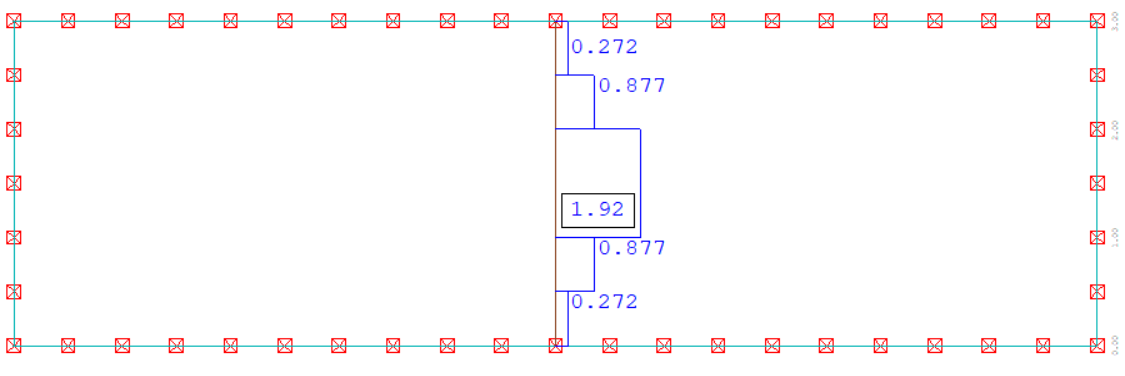
Les efforts sont calculés dans les points d’intégration puis moyennés pour obtenir l’effort au centre de l’élément.
La valeur maximale est de 1.92 kN.m , moyenne des éléments centraux.
On ne retrouve pas ici la valeur calculée manuellement de 3.0 kN.m, mais une valeur « lissée » sur les éléments entourant le pic. Nous retiendrons de cet exemple que les efforts aux nœuds donnent des résultats conformes à ceux calculés manuellement, ce qui n'est pas le cas des efforts calculés au centre des éléments.
c) Efforts lissés sur les éléments
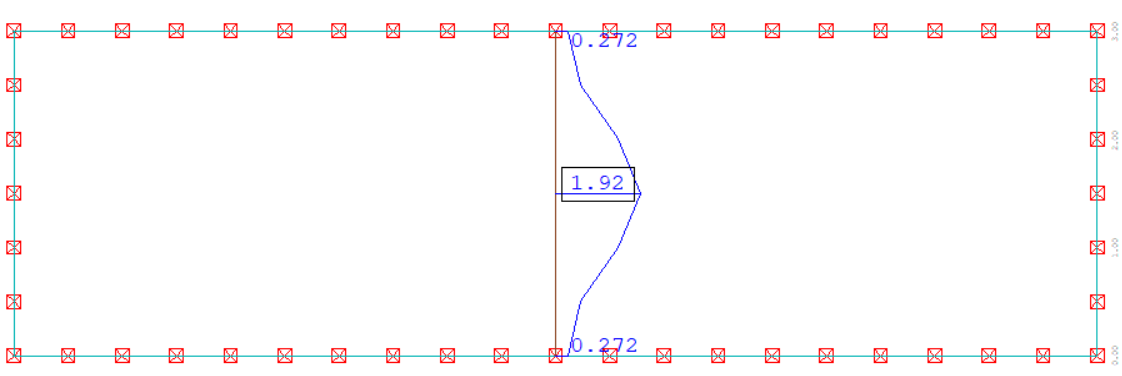
Les efforts sont calculés au centre des éléments puis lissés entre eux.
Cette courbe fait croire à une courbe extrapolée sur les nœuds, alors que les extrapolations sont effectuées seulement sur les résultats aux centres des éléments, la courbe qui en résulte est sans signification physique donc « fausse ».
En revanche, dans un autre cas de figure, cette option de lissage des efforts au centre pourrait s’avérer utile si l'on désirait connaître les efforts aux nus de voiles.
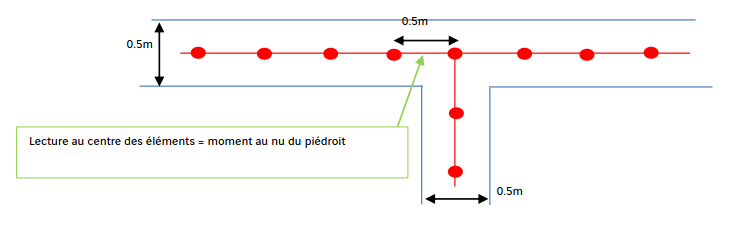
Pour être valable, la largeur de la maille devrait être égale à l’épaisseur du voile.
Les visualisations des résultats des éléments finis au droit des pics donnent des résultats très différents selon les options choisies par l'ingénieur. Ces résultats ne peuvent pas être pris tels quels, mais doivent être analysés et interprétés par l'ingénieur.
La figure ci-dessous montre les valeurs obtenues avec une force ponctuelle de 10 kN au centre de la dalle.
La valeur de moment passe à 5.2 kN.m et l'allure de la courbe de moment présente nettement un pic.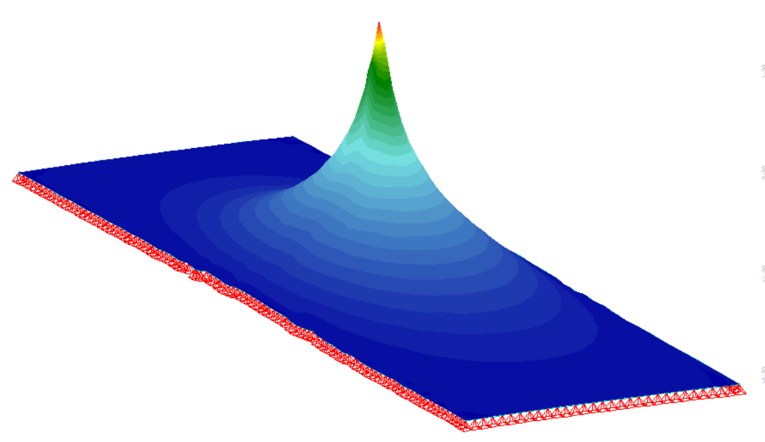
Plus loin dans le présent chapitre, on verra que les forces ponctuelles (qui n'ont pas de sens physique) conduisent à des pics d'efforts et qu'il vaut mieux éviter leur emploi pour obtenir des résultats locaux précis.
D.5.2 Méthode d’analyses des pics
Les cartographies d’aciers présentent souvent des pics d’aciers dont les conséquences sont très importantes dans le dimensionnement du ferraillage.
L’utilisateur est souvent dépourvu devant ces pics : faut il les prendre en compte en considérant qu’ils sont structurels ou les ignorer en les assimilant à des problèmes de calculs numériques ?
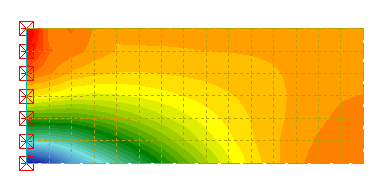
Exemple : les pics visualisés ci-dessus à l’encastrement de cette poutre en console sont bien entendu structurels.
La réponse à cette problématique réside dans la compréhension du fonctionnement de la structure et du cheminement des efforts au niveau du pic, analyse indispensable pour solutionner les pics (écrêter, linéariser les ferraillages).
Cette démarche peut s’avérer difficile dans le cas de modélisations complexes, mais est toujours indispensable.
Trois types d’analyses sont envisageables :
| Analyses | Objectif |
| 1 : Analyse géométrique | Repérer les singularités de la modélisation au droit du pic pour en déterminer l’origine géométrique |
| 2 : Analyse des sections d’acier Axi, Axs, Ayi, Ays | Réaliser une première distinction entre les efforts de membrane, de cisaillement et de flexion |
| 3 : Analyse des efforts générant le pic | Détecter la ou les composantes « fautives » et quantifier les efforts |
D.5.2.1 Première analyse : géométrique
L’expérience montre que 90% des pics se situent au niveau de singularités géométriques (poteaux, appuis, intersections voiles/voiles ou voiles/dalles, etc.). Ceci est dû au fait que la modélisation, réalisée à partir des plans moyens ou fibres moyennes ne représente pas les éléments avec leur géométrie volumique réelle (par exemple, une dalle est représentée par un élément plan et les poteaux sur lesquels elle s'appuie, par des élément filaires). De manière imagée, ceci conduit, comme explicité en D.5.1, à prendre en compte des forces appliquées sur des surfaces nulles, donc fatalement à des problèmes numériques. Il est donc indispensable de repérer ces singularités sur le modèle.
a) Exemples de pics liés à la géométrie
Nous partageons ci-après un exemple d’une dalle sur un réseau de poteaux/poutres pour lequel des pics de moments apparaissent au niveau des appuis formés par les poteaux.
Ces pics doivent être interprétés en détail, il est possible de réduire les valeurs des moments dimensionnants en écrêtant au droit des poutres.
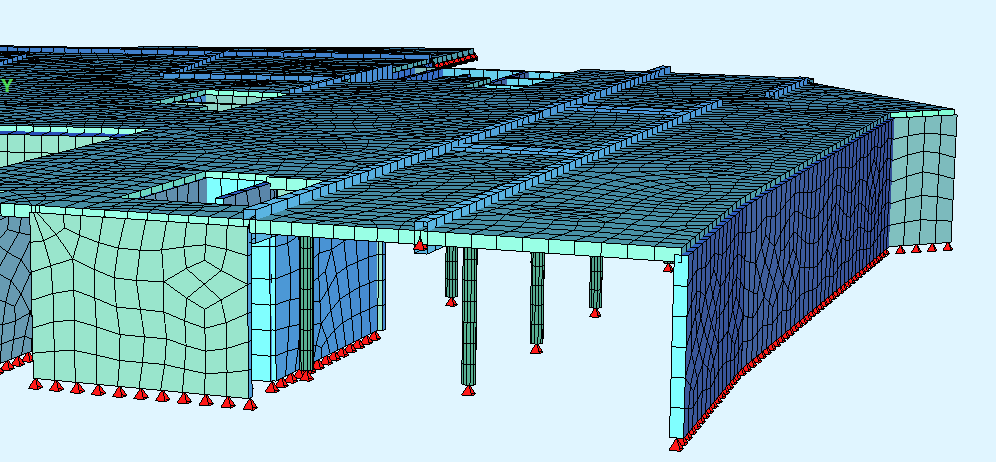
Exemple d’une dalle sur réseau de poteaux et de poutres
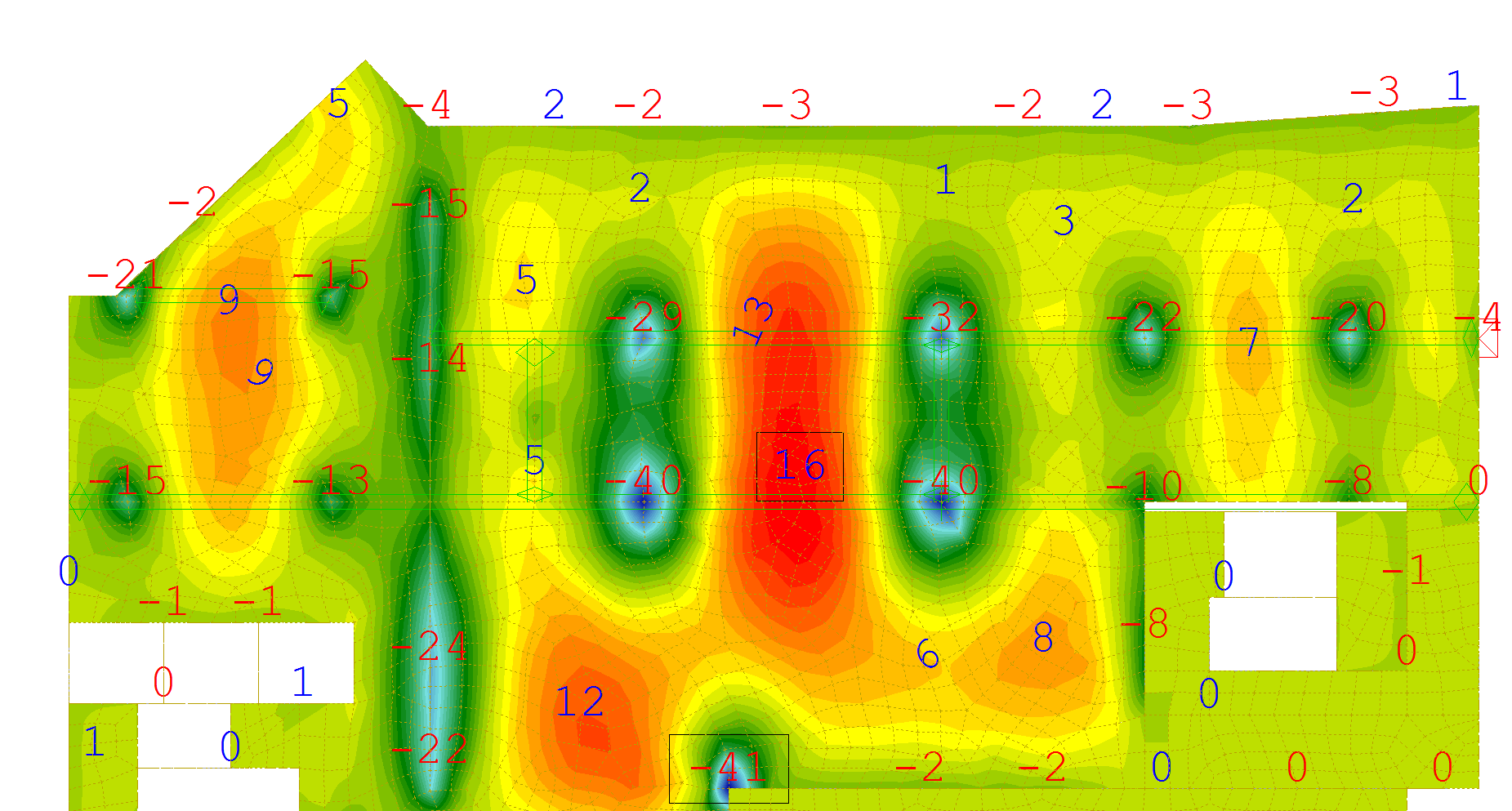
Visualisation des moments fléchissants dans la dalle
Il apparait des pics qu’il est possible d’écrêter au droit des poutres :

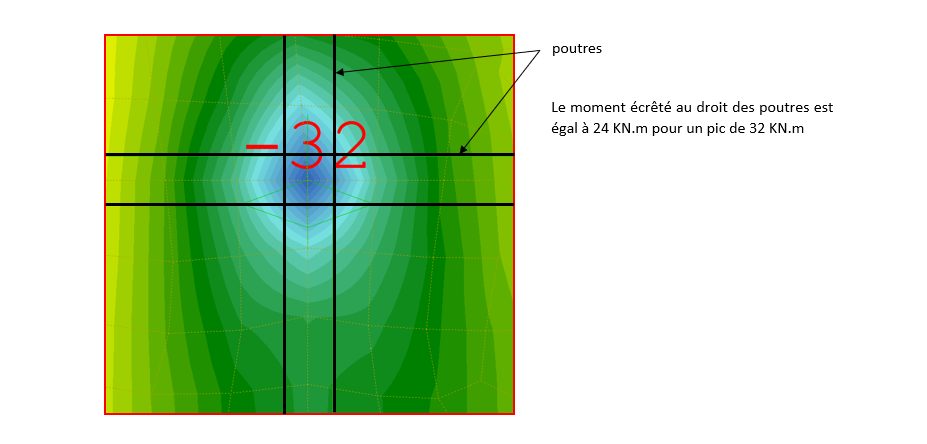
Dans le cas ci-dessus, on écrête conventionnellement au nu des arêtes des poutres ou du poteau en cas de plancher champignon.
Certains logiciels permettent de définir des appuis avec des dimensions en plan pour obtenir directement les efforts aux nus. Exemple d'une dalle de 10×10 m², d'épaisseur 30 cm soumise à son poids propre, appuyé linéairement sur une rive et sur deux appuis ponctuels au droit de deux poteaux à 1 m de chaque coin. L'appui de gauche est un appui ponctuel classique, l'appui de droite est un appui de type poteau, de 50×50 cm².
La représentation des efforts avec et sans réduction des efforts, montre un écart notable sur les valeurs.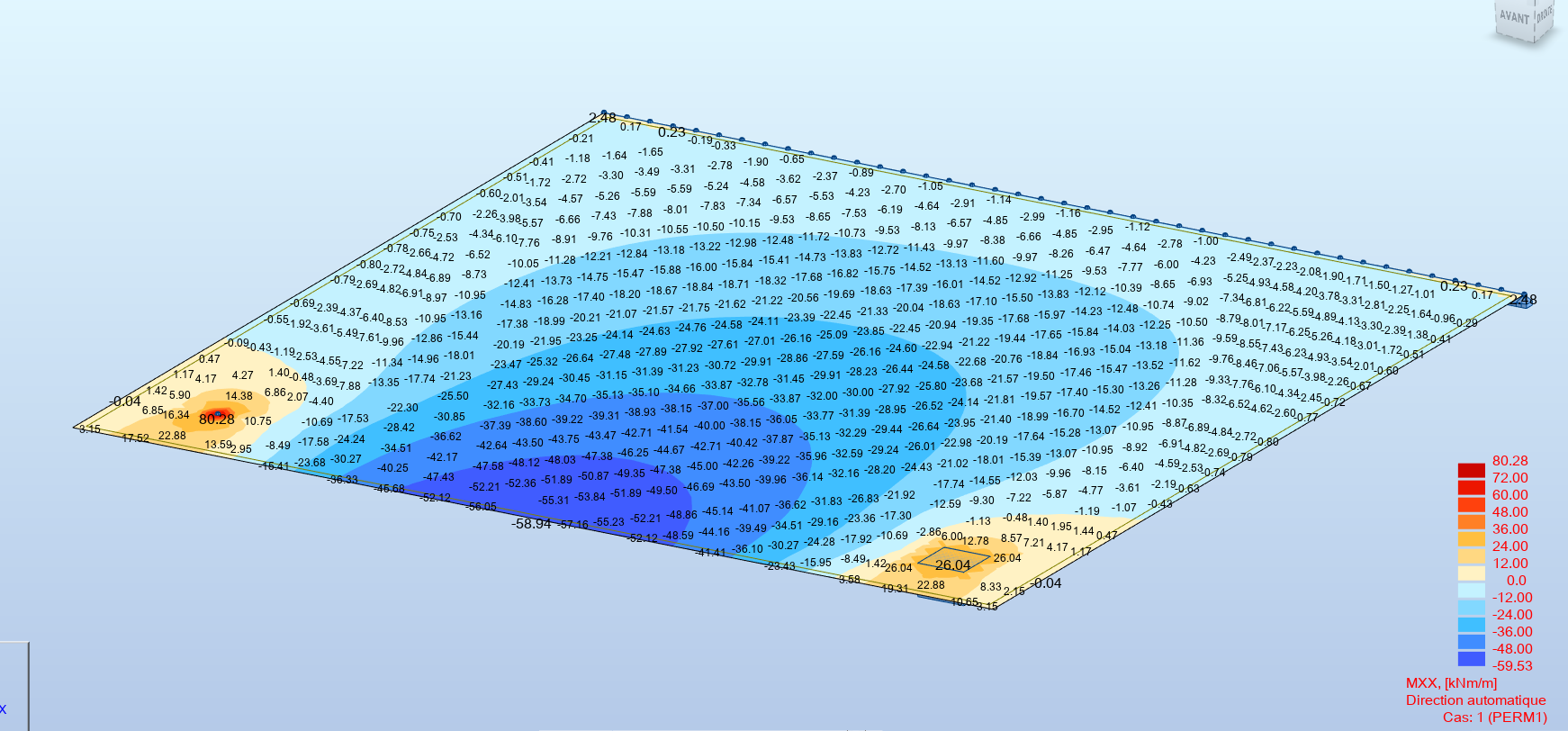
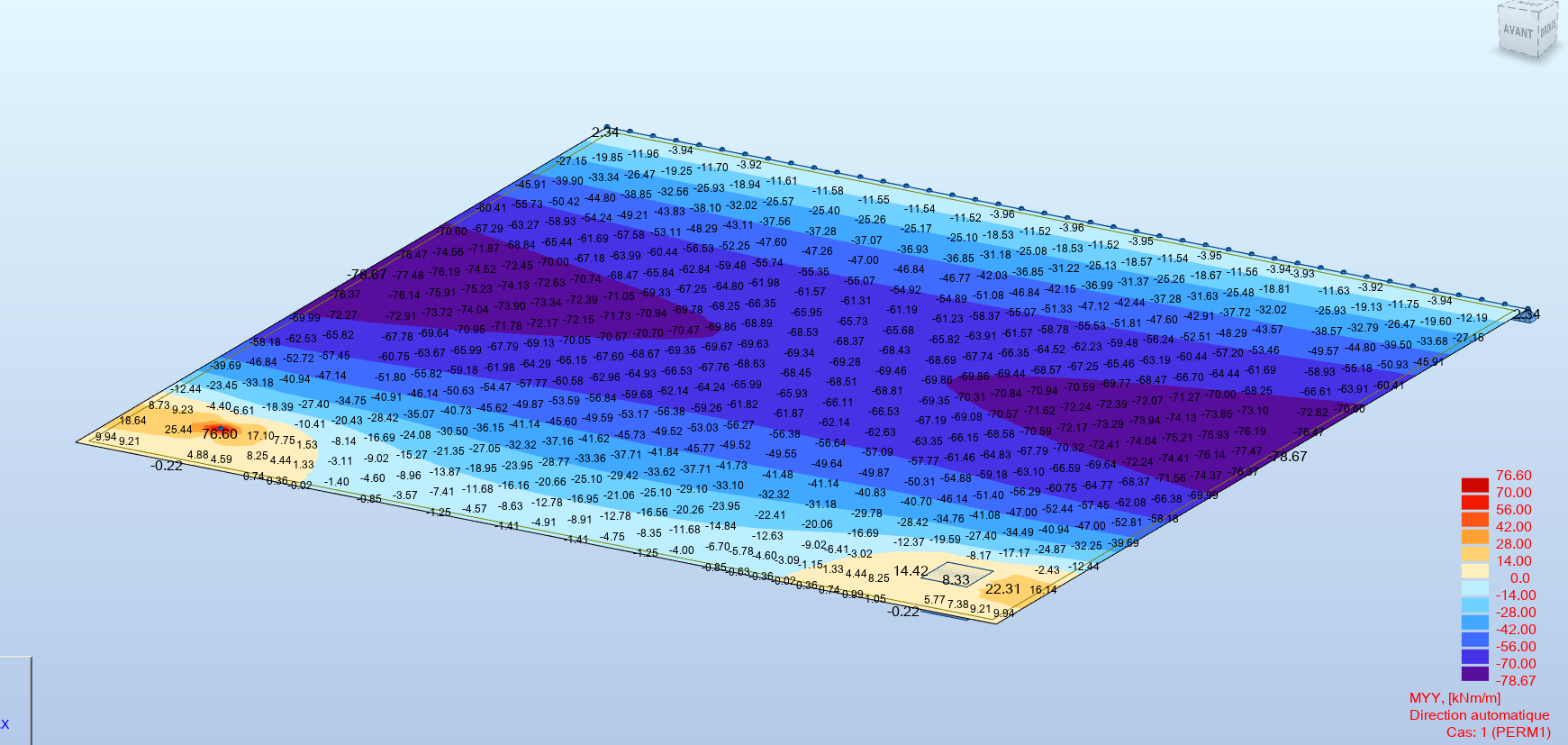
Nota: il convient toujours de bien vérifier la méthodologie employée par les logiciels et de s'assurer qu'elle est compatible avec les justifications réglementaires à effectuer.
b) Pics causés par des forces ponctuelles
Le traitement des pics au droit des charges concentrées se rapproche de celui des pics causés par les liaisons ponctuelles. (Une force ou un torseur peut représenter les effets d'un appui ponctuel; il y a une stricte équivalence).
Exemple :
On prend l'exemple trivial d'une charge arrivant via un poteau sur un voile (voile d'épaisseur 30 cm, poteau de 55×30 cm²).
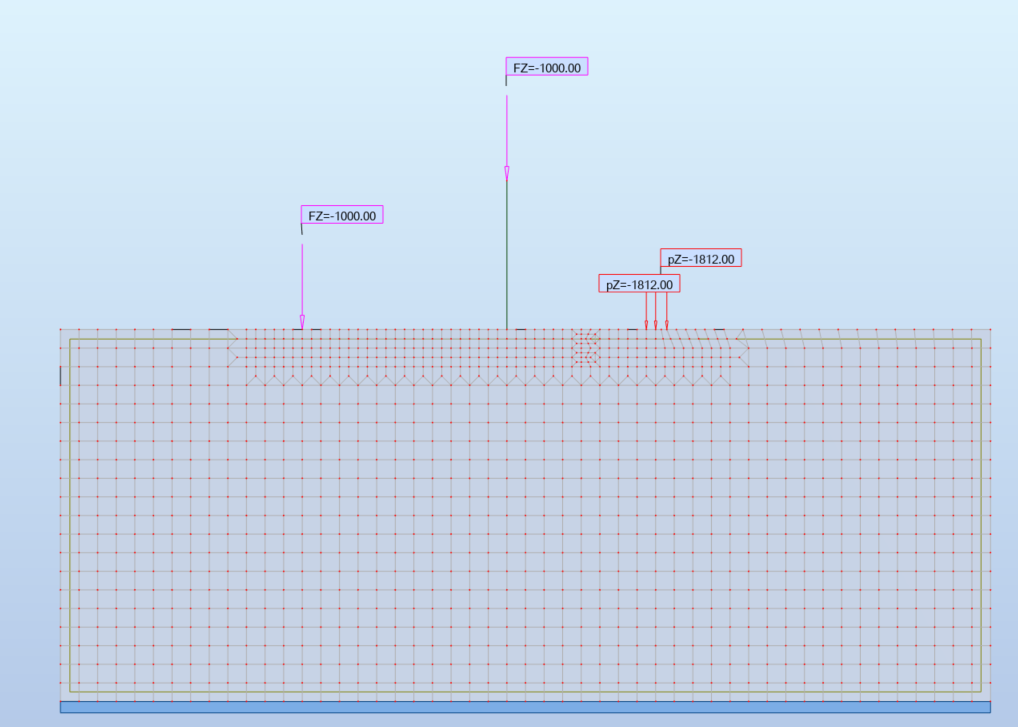
Suivant ce que l'on va chercher à calculer, l'approche ne sera pas la même. Si l'on recherche une descente de charge globale, les approches de gauche, soit via une charge ponctuelle, soit via une barre filaire conviennent parfaitement. Cependant, si l'on s'intéresse aux effets locaux, il faut absolument repasser par une charge répartie pour minimiser le pic de contraintes, ce qui ne facilite pas les calculs automatisés (et ne préjuge pas d'autres calculs manuels à effectuer: diffusion, poinçonnement …).
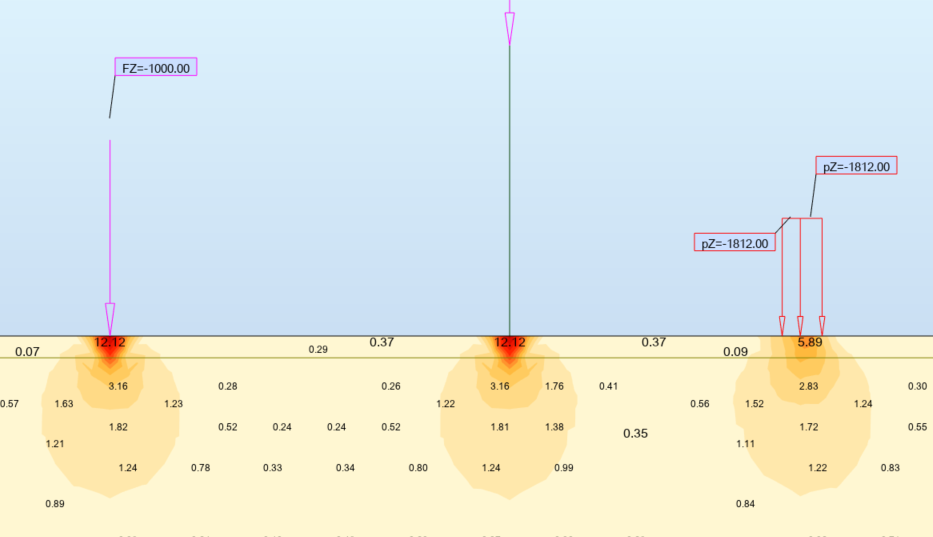
-
Pic lié à la façon de modéliser une charge sur une dalle: cas d'une charge de roue sur un hourdis de pont
Une charge concentrée perpendiculaire à une dalle génère un pic de moment (voir D.5.1). Ce pic est à traiter pour calculer le ferraillage. Il peut être réduit en remplaçant la charge concentrée par un pavé de chargement prenant en compte la diffusion de la charge dans la dalle (diffusion d’une roue sur un hourdis de pont).
Exemple :
On compare le moment longitudinal pour une même charge de 100 kN suivant quatre approches :
-
une force ponctuelle au centre d’une maille ;
-
une force ponctuelle sur un nœud ;
-
une pression correspondant à une force de 100 kN sur une surface de 0.25×0.25 m² (la maille) ;
-
la force de 100 kN/4 = 25 kN répartie aux 4 nœuds encadrant une maille de 0.25×0.25 m².
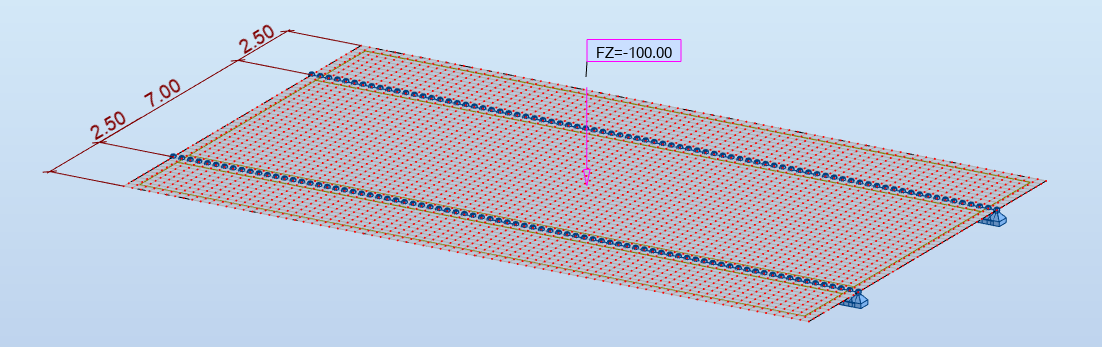
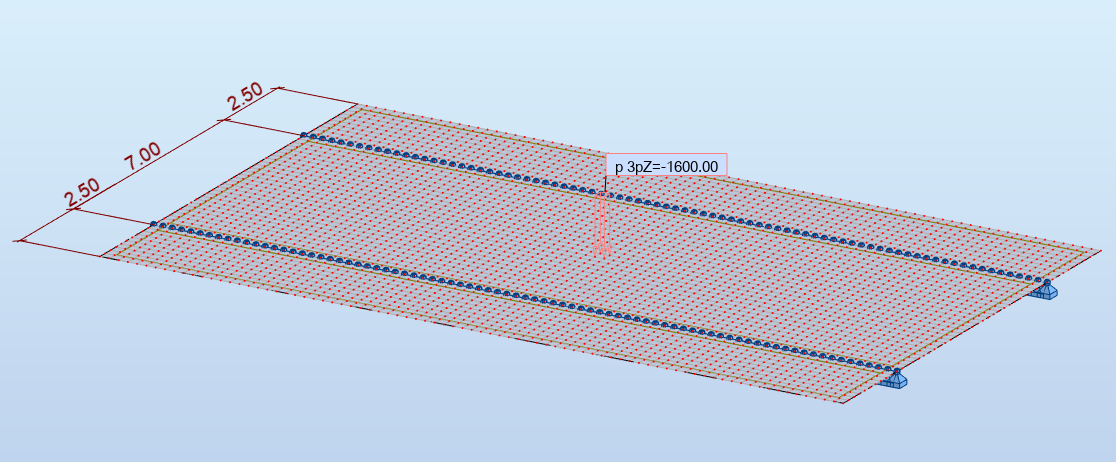
Force de 100 kN au centre d’une maille → Mx=26.62 kN.m/m
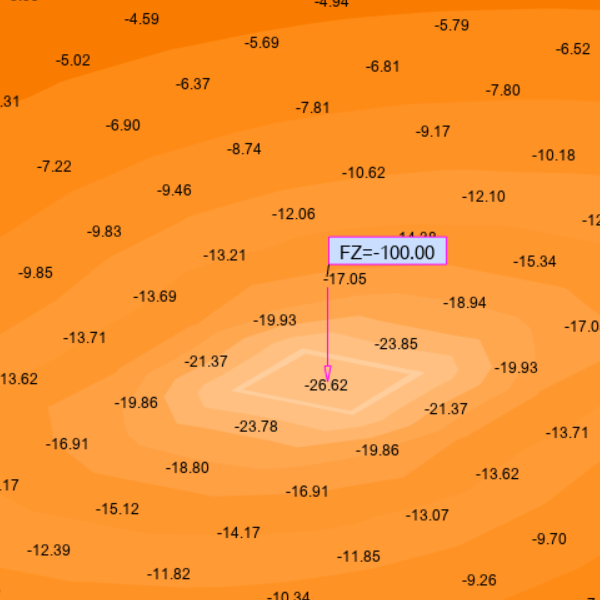
Force de 100 kN sur un nœud → Mx=48.12 kN.m/m
 .
. 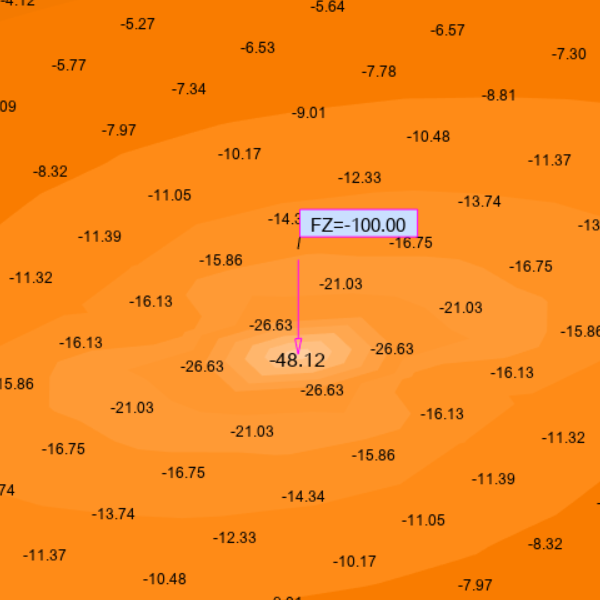
Pression répartie sur une maille → Mx=26.62 kN.m/m
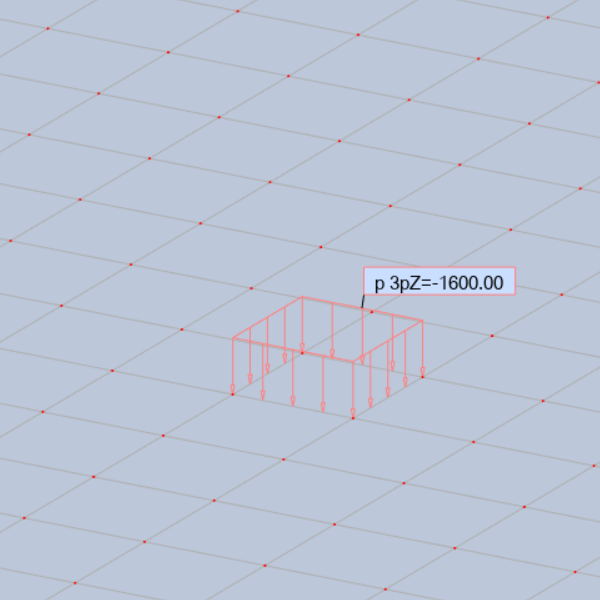 .
. 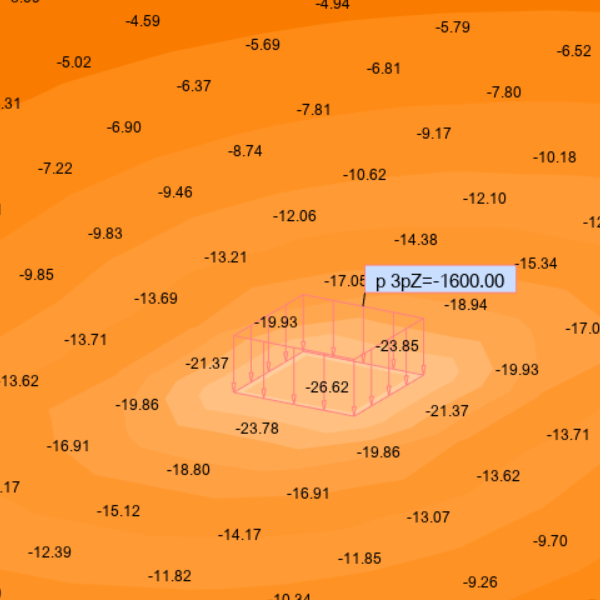
1/4 de force sur 4 nœuds → Mx=26.62 kN.m/m
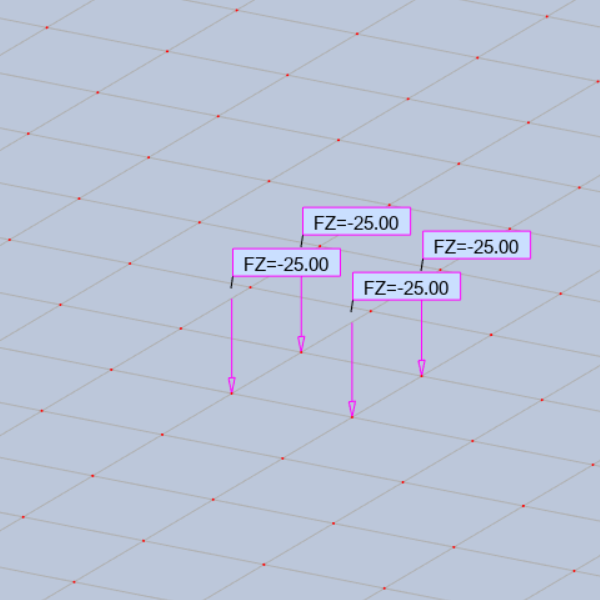 .
. 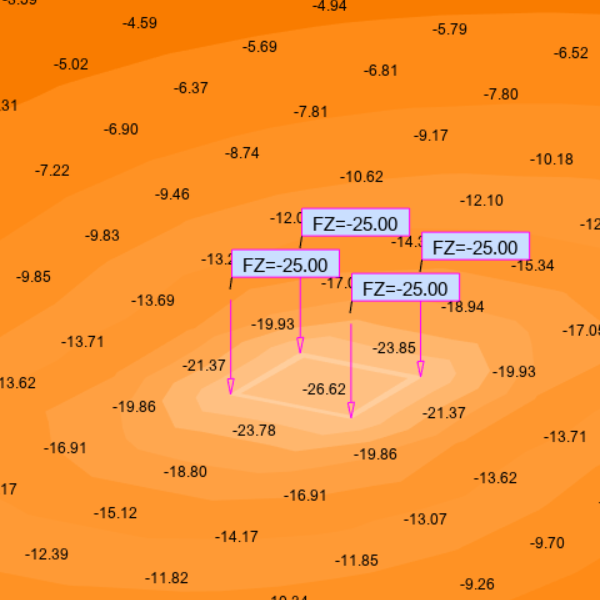
En conclusion, on se rend compte que la modélisation d’une charge répartie par une force ponctuelle peut s’avérer très pénalisante, surtout si cette charge est appliquée sur un nœud du maillage : il vaut mieux passer par des pressions (sachant que le logiciel répartit les charges aux nœuds), ou à défaut scinder la force en plusieurs charges pour éviter le pic d’effort potentiel.
Conseil : éviter la modélisation de forces réparties par une résultante ponctuelle pour le calcul des efforts dans les dalles ou hourdis !
Il convient de s'assurer que la taille des mailles est dans une proportion correcte à la fois avec l'épaisseur de la plaque et la surface d'impact de la charge la plus petite.
En complément, pour illustrer les différents résultats que l'on peut obtenir pour un cas extrêmement simple, le Groupe de Travail a calculé les efforts générés par une roue Br du fascicule 62 titre II, à l'aide de plusieurs logiciels et avec plusieurs approches de lissage. L'étude est disponible dans la partie 3 ou directement ci-après : exemple de modélisation d'une roue Br.
Nota: Dans le cas de structures comportant majoritairement des charges d'exploitation réparties, la taille des mailles aura beaucoup moins d'impact que dans celui d'un hourdis supportant des charges roulantes. Il convient également d'adapter la taille des mailles à la finalité du calcul. Une descente de charges ne nécessite pas le même maillage que le calcul de dimensionnement d'EXE de l'élément de dalle.
Poinçonnement
Il a déjà été évoqué, plusieurs fois, le fait que les éléments finis ne traitaient pas certains sujets comme le décalage des courbes de moments, les écrêtages d'efforts tranchants proches des appuis ou encore les vérifications au poinçonnement.
Sauf cas particuliers, donc, les vérifications liées au poinçonnement restent à faire manuellement. Nous allons l'illustrer sur l'exemple de la charge sur le hourdis de pont montré ci-avant.
Le modélisateur pourrait être tenté de raisonner sur les contraintes de cisaillement moyennées sur la surface poinçonnée issues du calcul EF. Nous nous référons à la formule du BAEL qui a l'avantage de la simplicité. La contrainte de comparaison est simplement la charge divisée par le périmètre de l'impact diffusé au feuillet moyen et par l'épaisseur de la dalle.
Soit τ=100 kN/(4*0.25 m)/0.25 m=400 kPa (la dalle a une épaisseur de 25 cm).
Le calcul EF, lui, aboutit à des contraintes lissées (ici dans la zone la plus défavorable, pas strictement sur le périmètre de diffusion de la charge !) de l'ordre de :
-
τ=5.33 kN (intégrale sur 0.125 m, lue ci-dessous)/0.125 m/0.25 m= 171 KPa ;
-
τ=5.42 kN (intégrale sur 0.125 m, lue ci-dessous)/0.125 m/0.25 m= 173 KPa.
Nous sommes loin des 400 KPa que donne l'approche réglementaire au BAEL - la prise en compte des valeurs EF ne seraient pas sécuritaire. Mais il s'agit de deux approches différentes: les cisaillements dans la dalle servent à calculer les armatures de tranchant et le poinçonnement est un autre type de vérification.
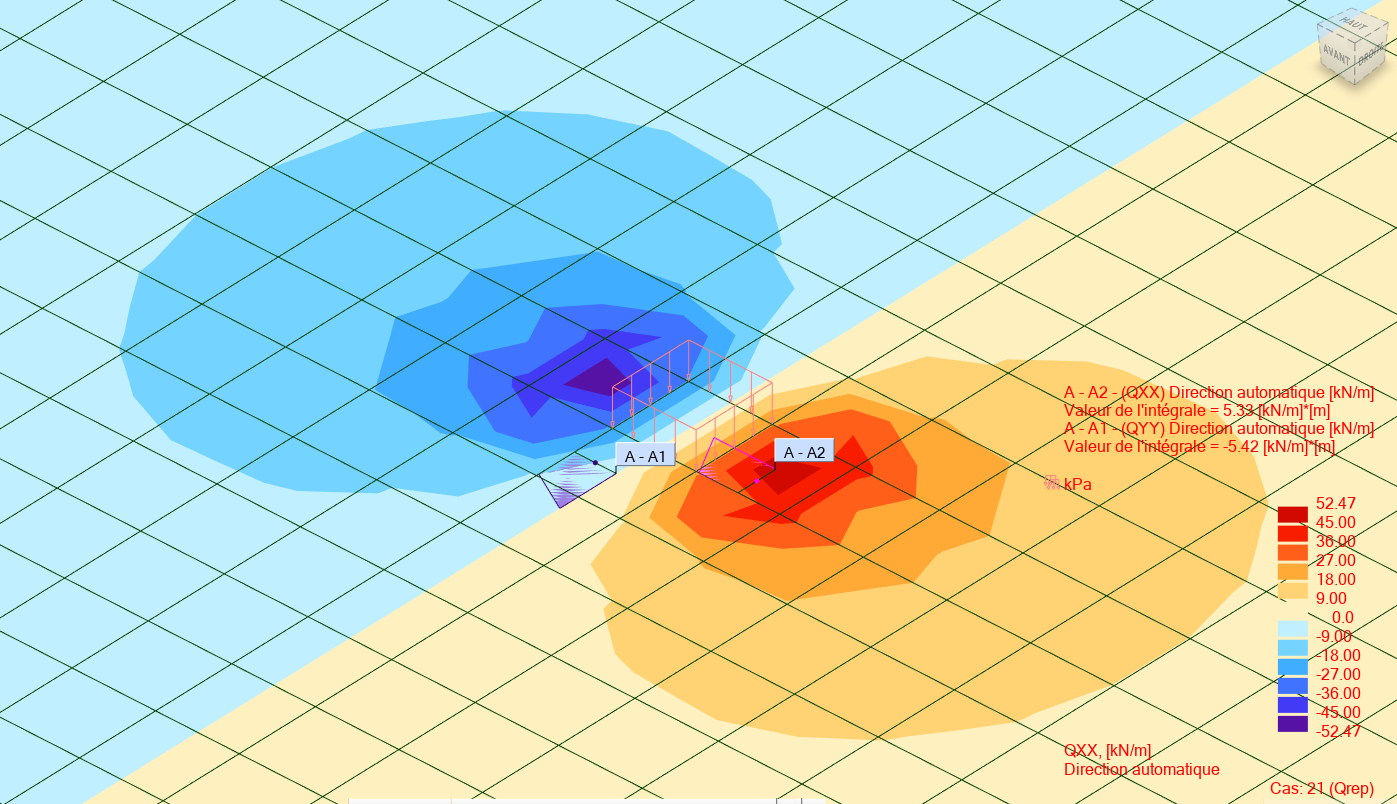
Effort Qxx (KN/m)
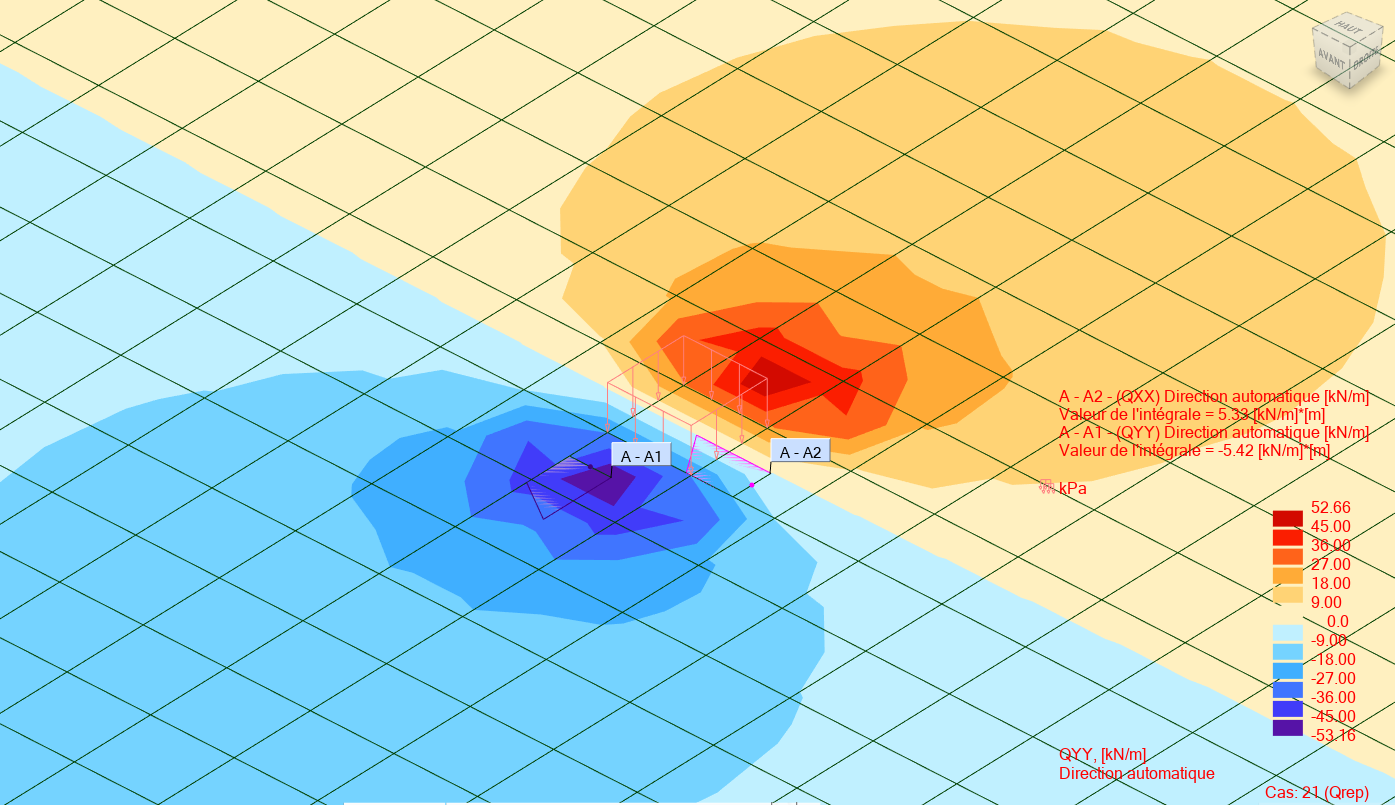
Effort Qyy (KN/m)
Pour le calcul des structures en béton armé, on retiendra que les pics ont pour origine des efforts ou des appuis ponctuels.
c) Pics causés par des problèmes de maillage
Le repérage géométrique du pic permet souvent de détecter les causes.
Exemple d'une incohérence de résultats liée à la modélisation : une construction graphique peut donner l'illusion qu'une arête est commune à deux coques, alors qu'en réalité il y a un décalage extrêmement faible qui conduit à des résultats aberrants. Pour illustrer ce cas, nous prolongeons la dalle d'un exemple ci-avant par un autre élément rectangulaire que nous croyons être strictement dans le même plan que le précédent. Les résultats doivent nous alerter du fait de certains pics qui apparaissent:
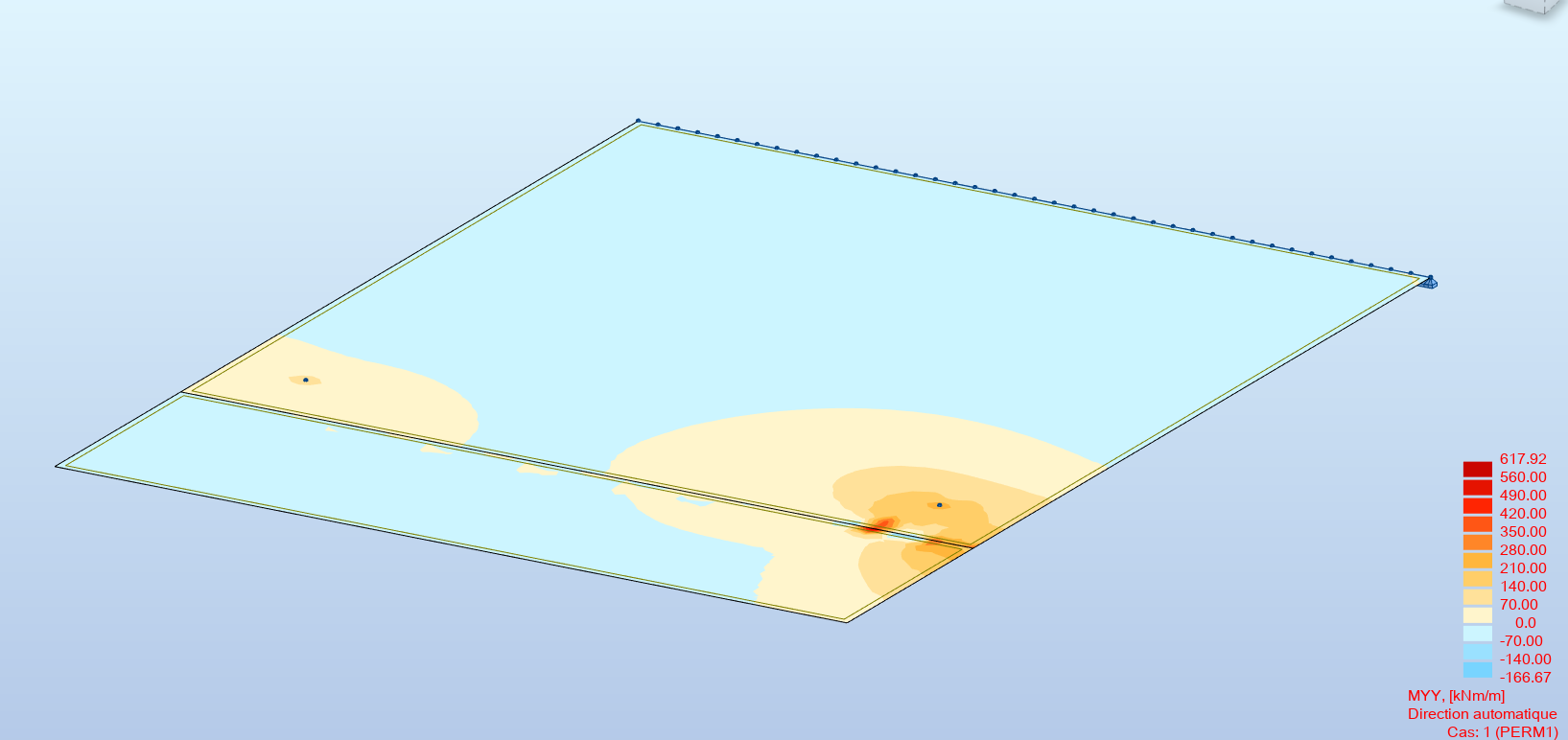
En zoomant, on constate, côté droit, que le raccord ne se fait que sur quelques points (correspondant sans doute à une tolérance géométrique du logiciel) alors que côté gauche on a un décalage, très faible (et provoqué dans le cas présent !) mais qui empêche le raccordement.
On voit sur la figure ci-dessous que les nœuds sur l'arête commune ne sont pas tous raccordés : ceci doit attirer l'attention.
L'observation de la déformée doit également nous alerter :
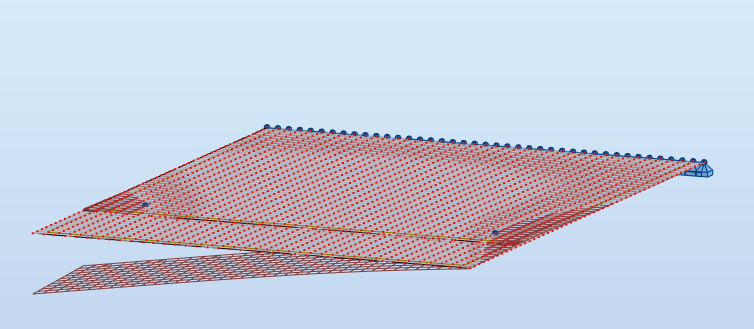
En cas de difficultés, l’utilisateur pourra préalablement créer lui-même les nœuds de l'arête jointive, le cas échéant avec des éléments de barre qui seront supprimés une fois le maillage fiabilisé et figé. Même si cette approche peut sembler fastidieuse de prime abord, le gain de temps peut largement en valoir la peine.
Il faut rester prudent quant à l’utilisation de corrections automatiques proposées par certains logiciels (en l’occurrence le liaisonnement de nœuds grâce à des liaisons cinématiques) qui peuvent conduire à des pics locaux de contraintes. Dans ce cas, il vaut mieux effacer certaines coques et recommencer proprement certaines parties du modèle. Voir également le § C.3.7.
D.5.2.2 Deuxième analyse : étude des sections d’aciers au droit du pic
Pour nous aider à repérer l’origine du pic, on peut analyser la cartographie des aciers sur chaque face, dans les deux directions de ferraillage. En effet, l’analyse des sections d’aciers Axi, Axs, Ayi et Ays au droit du pic fournit rapidement des informations importantes :
-
des efforts de membranes élevés NXX et NYY se détectent par des sections d’aciers importantes et égales sur les 2 faces. Si de plus les 4 sections d’aciers sont égales alors l’élément travaille en cisaillement dans le plan NXY ;
-
des moments fléchissants élevés MXX et MYY se détectent par des sections d’aciers importantes sur une fibre et très faibles sur l’autre.
Pour illustrer ces propos, le tableau ci-dessous résume les conséquences sur les armatures de chaque composant d’efforts :
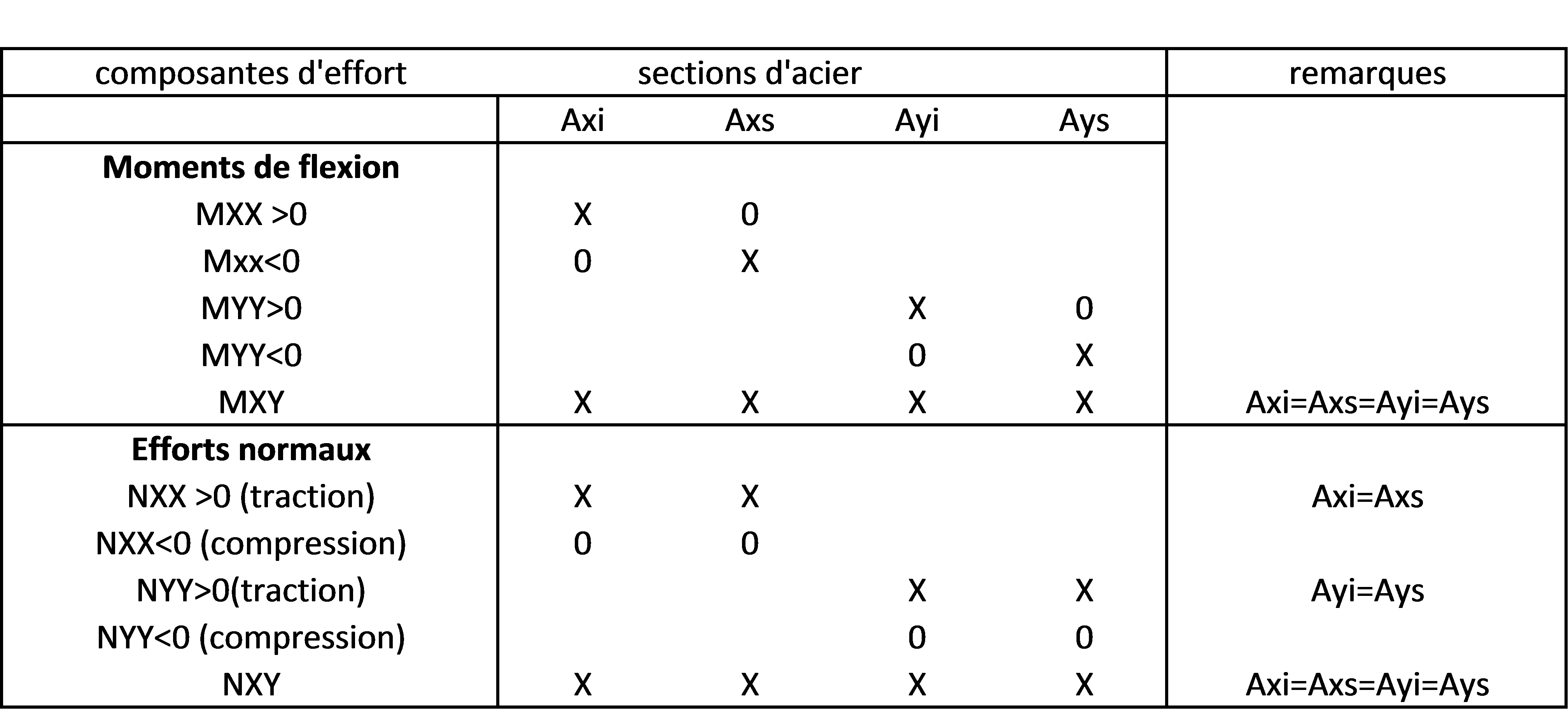
Le code X indique une valeur importante de la section d’acier, le code 0 une valeur faible.
A partir de là on procède à l’analyse décrite ci-après.
D.5.2.3 Troisième analyse : étude des efforts au droit du pic
Si les deux analyses précédentes ne sont pas suffisantes pour expliquer le pic, il est nécessaire alors d’étudier en détail les composantes des efforts pour en déterminer leurs intensités et repérer les cas de charges dimensionnants.
Cette analyse qui est souvent longue et délicate dans le cas d’une modélisation complexe, peut être grandement simplifiée pour les modélisations simples en procédant à des cartographies d’efforts ou des coupures locales.
D.5.3 Résolution du pic : détermination du ferraillage final
Après avoir compris le fonctionnement de la structure et maîtrisé les cheminements des efforts, l’ingénieur a tous les éléments pour solutionner le pic et en déduire le ferraillage strictement nécessaire.
D.5.3.1 Cas où les écrêtages ou lissages ne sont pas possibles
Dans certains cas, l'étude du cheminement des efforts montre que les pics sont réels et ne peuvent être écrêtés, c'est le cas des linteaux qui font apparaître des pics très importants à leurs extrémités, ce qui est logique car ce sont des poutres bi-encastrés qui doivent être calculées selon les règles de la RDM et du béton armé (poutre bi- encastrée soumise à un cisaillement constant).
D.5.3.2 Ecrêtage des moments sur appuis
L’article 9.5.3.2.2 de l’EC2-1 permet d’écrêter les moments au nu des appuis (voiles)
a) Poutre appuyée sur un poteau - exemple 1
Considérons l’exemple d’une dalle comportant 2 travées de 6 m et chargées uniformément par 25 kN/m².
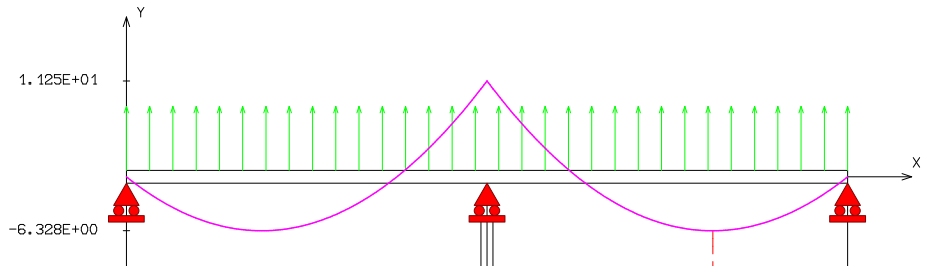
Les moments théoriques sont de -11.2 kN.m sur appuis et de 6.3 kN.m en travée
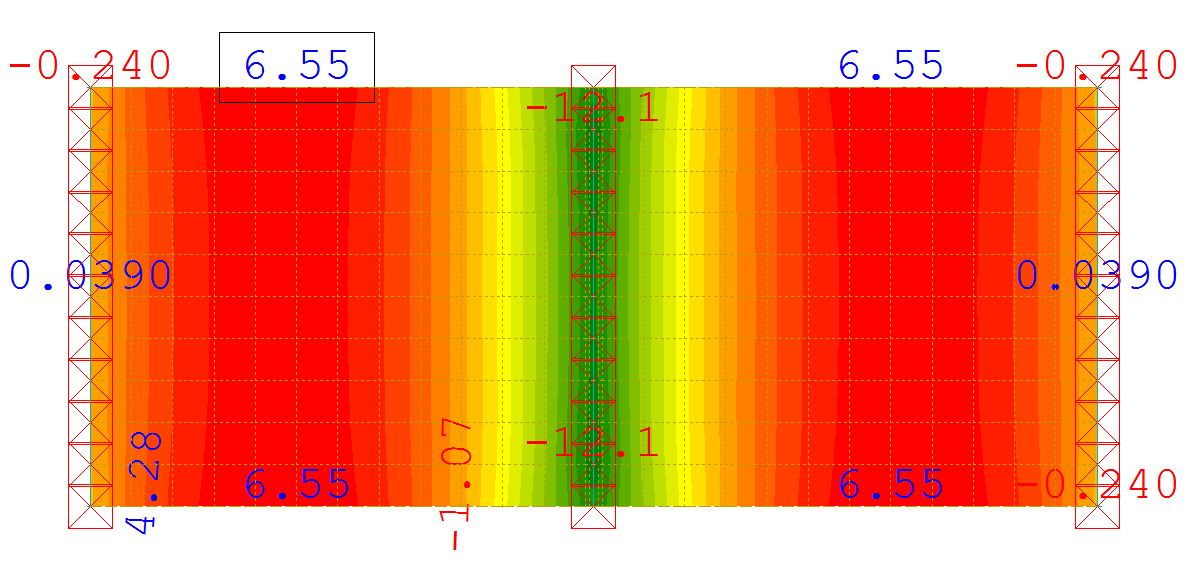
Le logiciel EF fait apparaitre un pic de -12.1 kN.m sur appui qui est réel.
Ecrêtage au nu du voile :
Pour obtenir le moment au nu du voile (ép. = 20 cm), l’utilisateur a plusieurs solutions :
-
soit réaliser des coupures au niveau de l’appui ;
-
soit ne pas visualiser la zone d’appui (mais cela nécessite une adaptation du maillage) ;
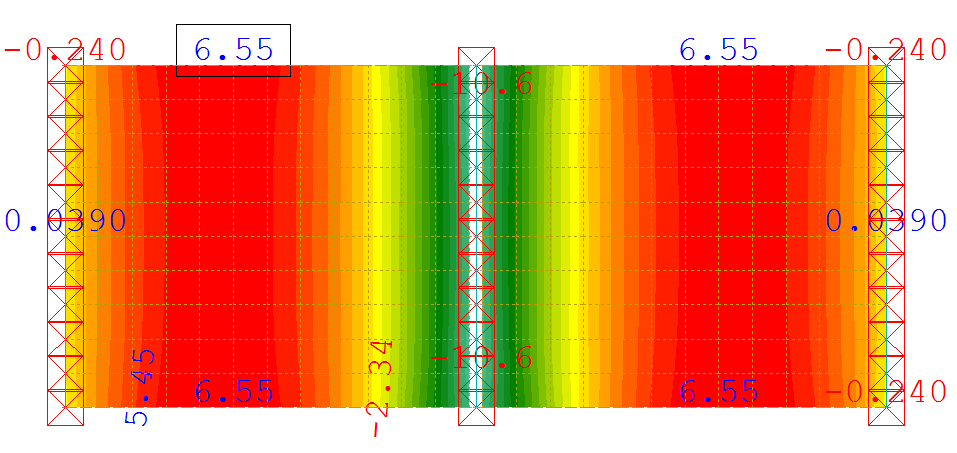
Moment au nu des appuis = -10.6 kN.m
-
soit adapter le maillage afin que la largeur de la maille sur appuis soit égale à l’épaisseur du voile, comme représenté ci-dessous.
Le moment au centre de la maille représentera alors le moment au nu de l’appui.
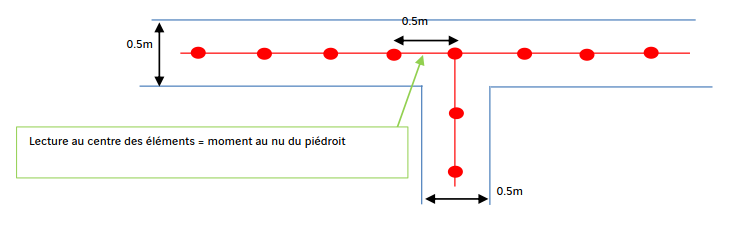
Le même type de réflexion et d'approche est à mener pour écrêter l' effort tranchant, le cas échéant.
b) Poutre appuyée sur un poteau - exemple 2
L’exemple ci-dessous montre deux manières de modéliser une structure poteau-poutre simple pour mettre en évidence les effets des dimensions réelles des structures.
Le principe est le suivant, pour une largeur hors plan de 1 m :
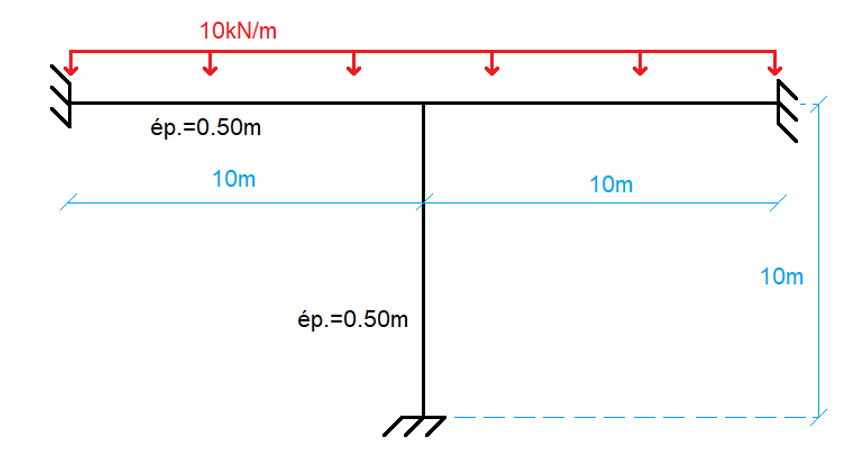
Dans un premier temps, un modèle filaire permet de calculer les moments, au niveau de l’appui central (vue tronquée) :
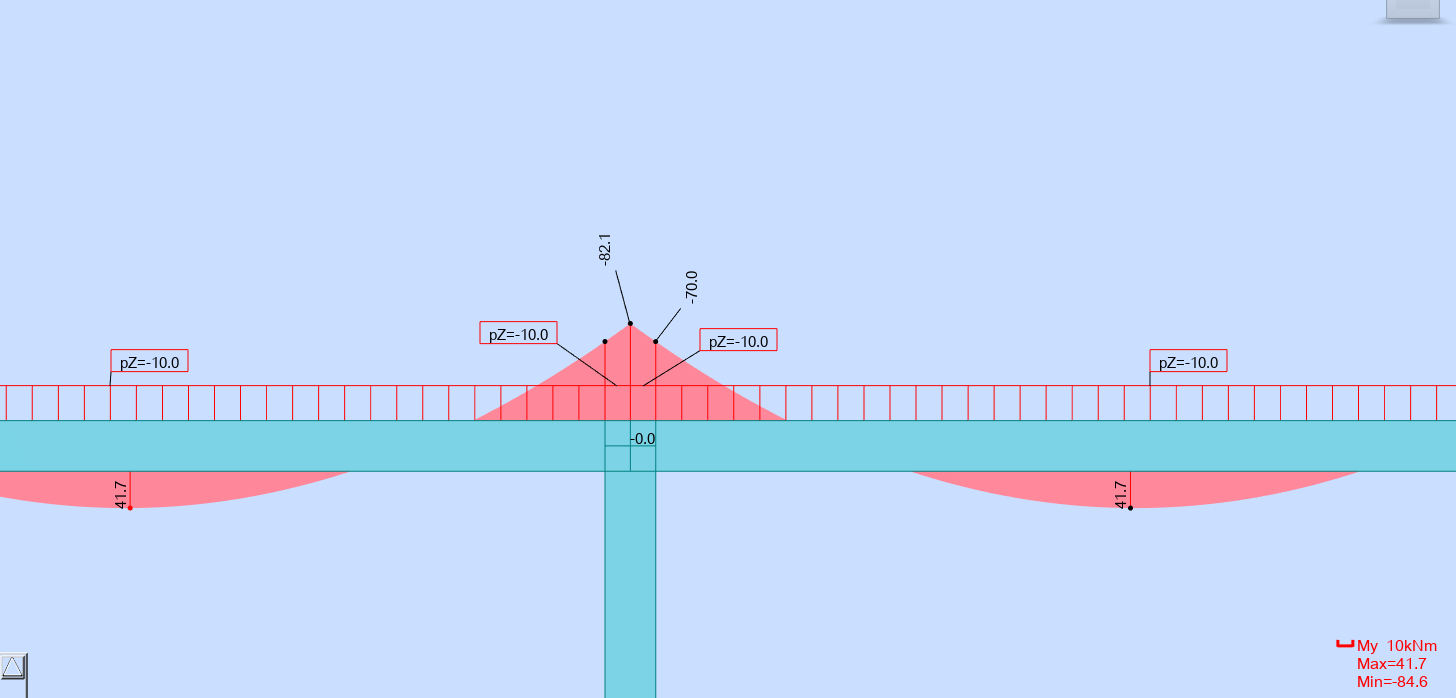
Le moment sur l’appui central vaut 82.09 kN.m, ce qui donne une contrainte extrême en fibre supérieure et en fibre inférieure de 6M/(bh²)=(6*82.09)/(1.0*0.5²) = 1970 kPa = 1.97 MPa. La contrainte au nu vaut, quant à elle (6*70.00)/(1.0*0.5²) = 1680 kPa = 1.68 MPa.
Ci-dessous le résultat (en contraintes) du même calcul effectué sur un modèle avec des plaques, bloquées en déplacement hors plan. Ce modèle permet de représenter le comportement en coupe, avec les épaisseurs réelles des éléments. (vue tronquée)
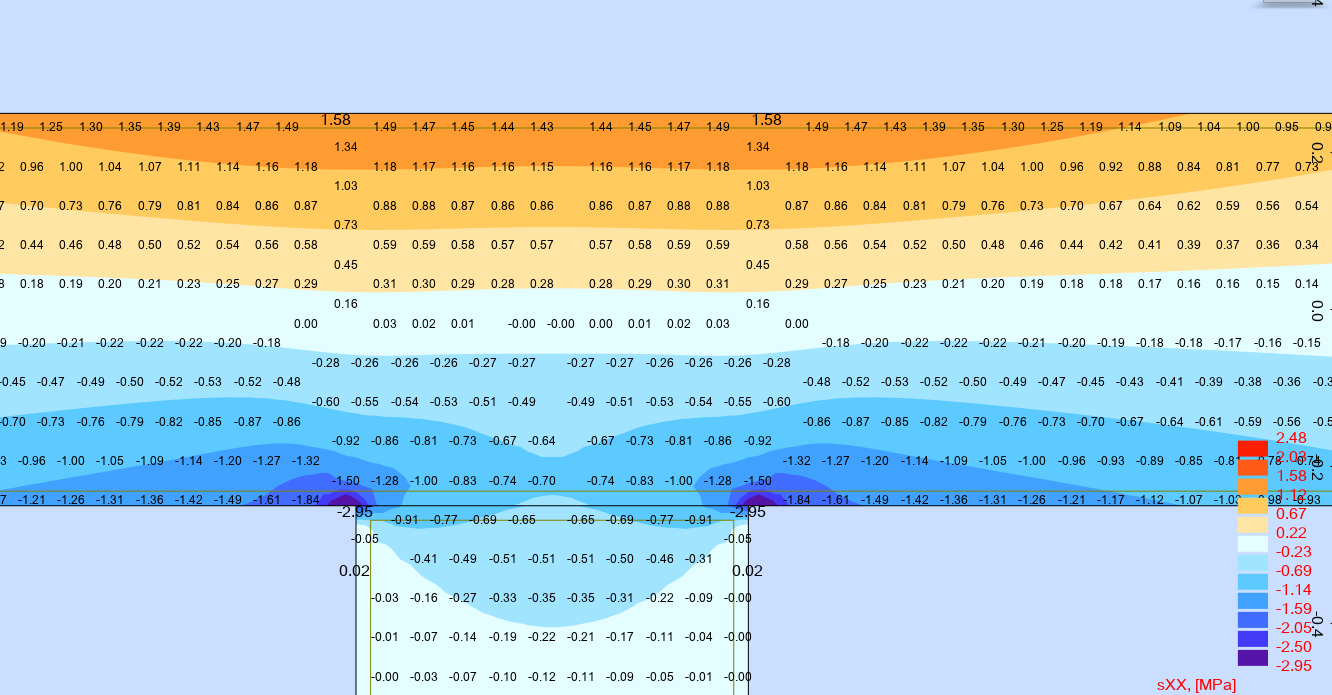
La contrainte obtenue en fibre supérieure est de 1.58 MPa. (Celle en fibre inférieure n'est pas représentative du fait qu'elle est calculée dans une zone singulière que constitue l'angle droit).
Ce modèle met en évidence la légitimité des écrêtages effectués dans la pratique.
D.5.4 Lissage des ferraillages
La méthode ci-après issue d’une pratique courante dans le domaine du Génie Civil Nucléaire permet de donner des règles simples pour lisser les ferraillages.
Son application reste néanmoins soumise au jugement de l’ingénieur. En particulier, dans le cas de planchers de bâtiments courants ou de hourdis de ponts, ces valeurs sont sans doute trop favorables et il semble loisible de réduire la taille du lissage à la moitié des valeurs ci-dessous, par conséquent plafonner cette taille à 2h (h étant l'épaisseur de la dalle).
Dans ce cadre, le lissage des sections d’armatures longitudinales et des armatures d’effort tranchant doit se faire :
-
entre éléments adjacents (et non successifs par rapport à la direction du ferraillage) ; le lissage se fait perpendiculairement à la direction du ferraillage ;
-
sur une distance raisonnable (jugement de l’ingénieur) et inférieure à une valeur fonction de l’épaisseur de la plaque et de la portée de la plaque.
La pratique courante actuelle est de faire la moyenne sur les résultats de trois éléments : l’élément pour lequel le maximum est observé et les deux éléments adjacents, en limitant la largeur sur laquelle s’effectue la redistribution à 4 fois l’épaisseur de la dalle (voir le tableau ci-après).
Ex : si la taille des éléments est de 1 m, faire la moyenne sur trois éléments revient à faire la moyenne sur une largeur de 3 m. Pour une dalle de 0.5 m, cette largeur est limitée à 4 fois l’épaisseur de la dalle, soit 2 m, ce qui conduit à faire la moyenne sur seulement deux éléments.
Il faudrait aussi limiter la largeur de répartition en fonction de la portée de la dalle ou de la hauteur du voile, en effet plus la portée (ou la hauteur) est faible, plus la largeur de répartition doit être réduite.
Règles proposées pour le lissage des pics de ferraillage longitudinal des dalles (issus des efforts N, M)
Elles sont présentées dans le tableau qui suit. Elles sont valables pour une dalle soumise essentiellement à des efforts de membrane et à des moments de flexion dus à des charges réparties hors du plan, et avec un maillage suffisamment fin qui présente :
-
un nombre impair d’éléments selon les deux directions de portée ;
-
au minimum de 5 éléments selon la petite portée (7 éléments si possible) ;
-
une taille de maillage égale à l’épaisseur des éléments porteurs.
| Largeur sur laquelle il est possible de lisser les sections d’armatures longitudinales et transversales | Limitation de la largeur de distribution en fonction de l’épaisseur h de la plaque | Limitation de la largeur de distribution en fonction de la portée L de la plaque |
| Zone où la redistribution des efforts peut se faire dans les deux directions | 4h | 0.5 L |
| Zone où la redistribution des efforts ne peut se faire que dans une seule direction (en bordure de trémie) | 2h | 0.25 L |
Pour des charges concentrées hors plan, il faut aussi tenir compte de la distance de la charge à l’appui et de sa diffusion.
Les pics de ferraillage se trouvent fréquemment en bordure de trémie, dans ce cas, la redistribution des efforts ne peut se faire que dans une direction et donc sur des largeurs limitées :
-
si un ferraillage complémentaire au ferraillage courant est nécessaire, on a toujours intérêt à le placer au plus près des bords de la trémie.
-
si après lissage du ferraillage comme spécifié ci-dessus, le ferraillage courant suffit, il est cependant recommandé de placer un ferraillage complémentaire en bordure de la trémie si plus d’une armature courante est coupée par la trémie dans une des deux directions.
Pour les petites ouvertures (en particulier les fourreaux) s’insérant dans la maille du ferraillage ou provoquant l’interruption d’une seule armature, il est possible de ne pas ajouter un ferraillage complémentaire.
Règle proposée pour le lissage des pics de ferraillage longitudinal dans les éléments membranaires (voiles)
Pour des éléments soumis à des efforts membranaires de traction, la redistribution ne peut s’effectuer que dans une direction.
| Largeur sur laquelle il est possible de lisser les sections d’armatures longitudinales et transversales | Limitation de la largeur de distribution en fonction de l’épaisseur h de la plaque | Limitation de la largeur de distribution en fonction de la portée L de la plaque |
| La redistribution des efforts ne peut se faire que dans une seule direction (en bordure de trémie) | 2h | 0.25 L |
Dans les voiles de contreventement soumis à un moment de flexion d'axe perpendiculaire au plan du voile, la contrainte membranaire de traction varie linéairement.
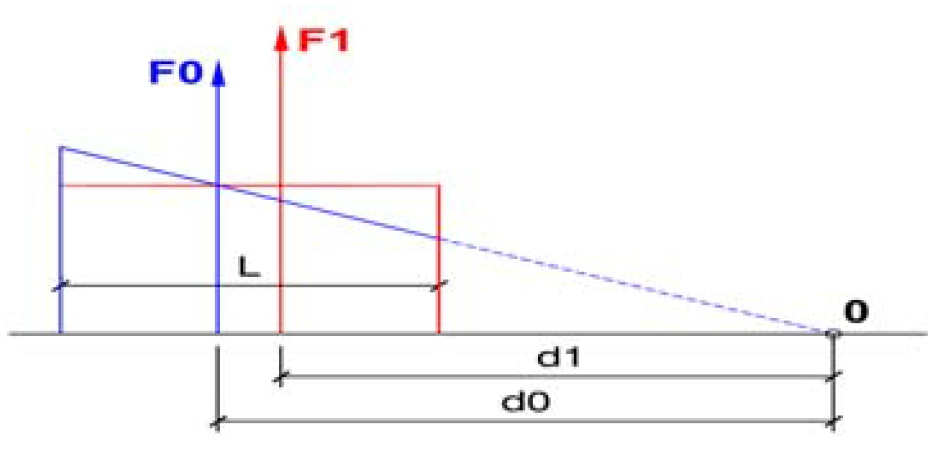
Lorsque l’on lisse les pics d’armatures, il faut étendre le ferraillage lissé sur une longueur suffisamment grande pour conserver la capacité de flexion : F1 x d1 > F0 x d0, où :
-
F1 = effort résultant repris par les armatures après lissage sur la longueur L ;
-
d1 = distance entre la résultante F1 et le point de moment nul ;
-
paramètres ci-dessus avec indice 0 = avant lissage.
Pour des éléments soumis à un cisaillement de membrane, il est possible de reporter une partie de la section requise AX vers la section AY, si cette dernière est surabondante et réciproquement. En effet les logiciels courants utilisent la méthode de Capra Maury qui optimise la somme des sections d’armatures AX + AY.
La section AY peut être parfois déterminée par la condition de ferraillage minimale et la section AY prévue est alors supérieure à la section AY requise à partir du calcul de résistance, permettant ainsi une redistribution des sections d’armatures. Il faut ensuite vérifier la résistance de la section avec les nouvelles sections d’armatures.
Conclusion concernant le lissage des pics de ferraillage longitudinal
Dans tous les cas, il faut tenir compte de l’origine des besoins d’acier en analysant les efforts (Nxx, Nyy, Nxy, Mxx, Myy, Mxy) et interpréter les résultats, au cas par cas, avec une approche «béton armé».
En général, le ferraillage des voiles provient majoritairement des efforts de membranes (Nxx,Nyy,Nxy), les efforts de flexion (Mxx,Myy,Mxy) étant alors négligeables. Par contre le ferraillage des planchers est dû principalement aux efforts de flexion (Mxx,Myy,Mxy), et dans certains cas par des efforts de membrane (Nxx,Nyy,Nxy) lorsque le bâtiment est soumis à des efforts horizontaux (vent, séisme) ou à des irrégularités (poutres voiles).
Une poutre voile est un bon exemple d'irrégularité produisant des efforts horizontaux dans les planchers: l'exemple ci-après reprend la poutre voile reposant sur 2 poteaux étudiée au chapitre D.4.5, mais en modélisant un plancher inférieur; les contraintes de traction visualisées en rouge montrent que le tirant inférieur se forme non seulement à la base du voile mais aussi dans le plancher inférieur :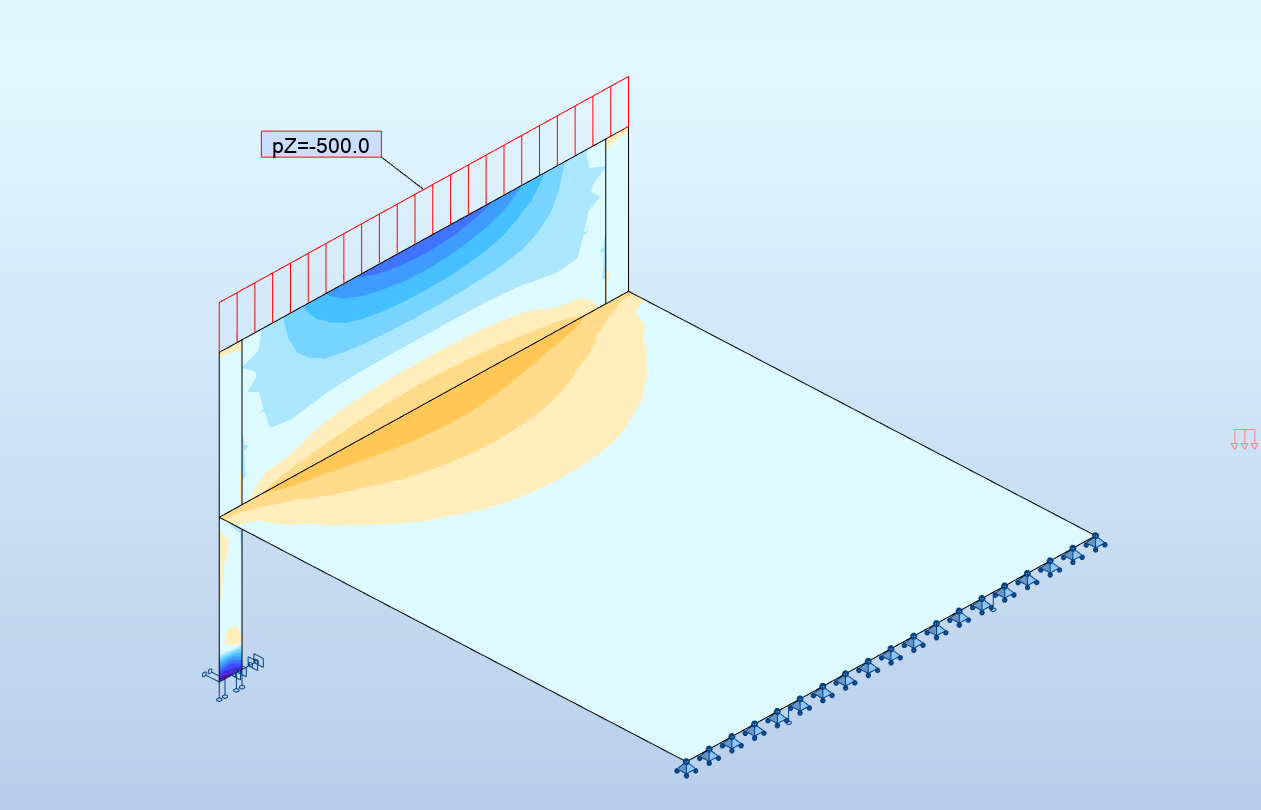
Les tractions sont encore plus importantes (ici +50%) dans le cas d'ouvertures à la base du voile :
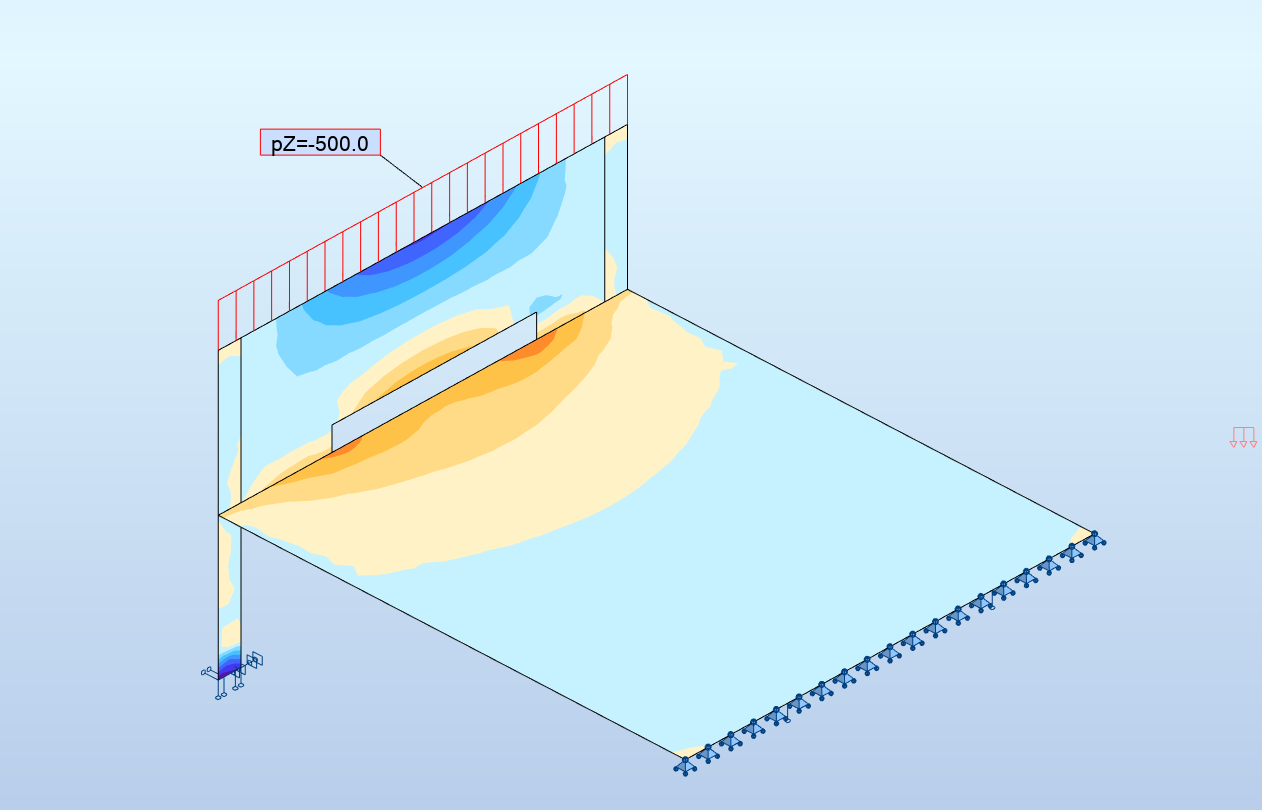
Règle proposée pour le lissage des pics d'armatures d’effort tranchant (perpendiculaire aux éléments)
Généralement, les pics d’effort tranchant perpendiculaire aux éléments se produisent à l’intersection de plusieurs plaques
Les pics d’armatures d’effort tranchant apparaissent souvent lorsque l’effort tranchant est concomitant avec une traction importante.
Pour rappel, pour la justification du béton armé, la concomitance d’un effort tranchant avec une traction nécessite une attention particulière car cela signifie qu’il n’y a pas formation de bielle de compression dans le béton et donc un risque de rupture.
La résolution de ce type de pic nécessite de revenir aux efforts, de moyenner les efforts tranchants et les efforts normaux et de recalculer les armatures.
Illustration des approches:
Exemple 1 :
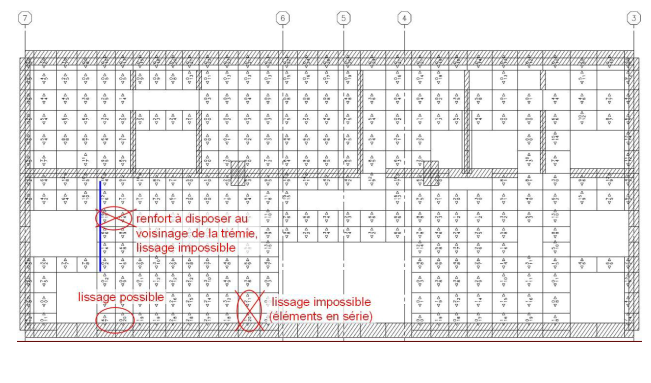
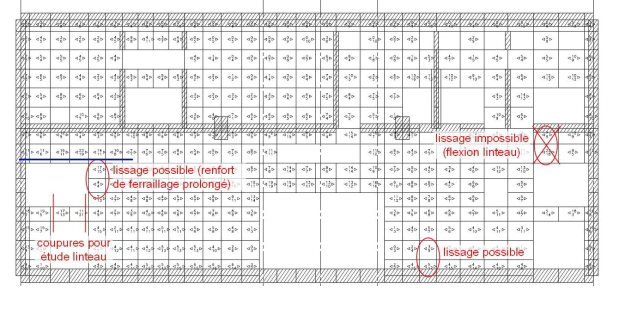
Exemple 2 :
Les pics de ferraillage lus sur les cartes sont lissés selon le principe suivant :
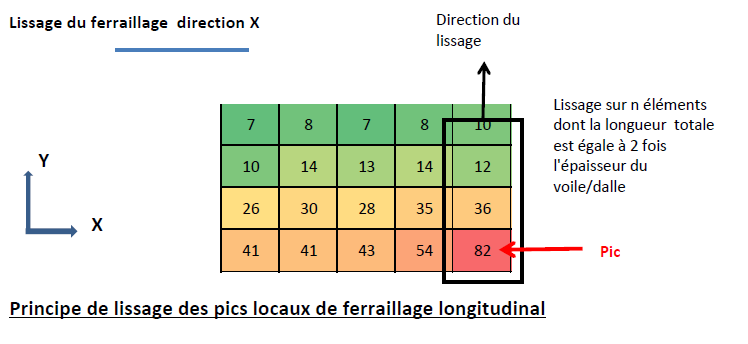
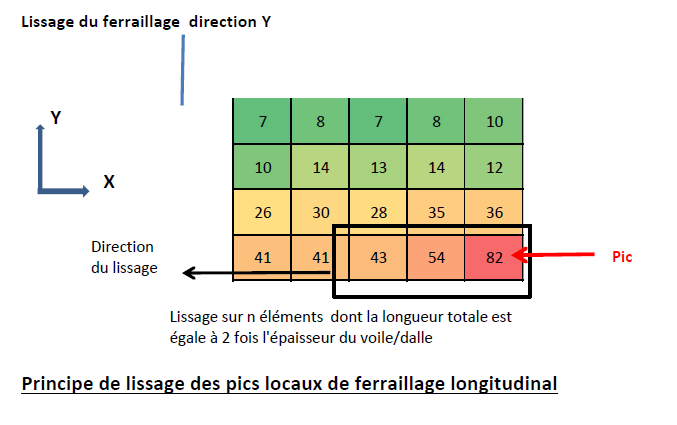
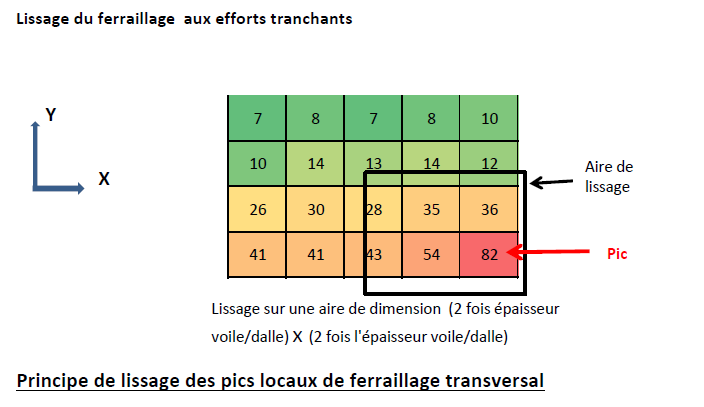
D.5.5 Répartition des efforts dans les poutres et les dalles
Il est important de rappeler que, sauf exception, le calcul des efforts internes dans les éléments est un calcul élastique linéaire avec un module de béton constant.
Les pics d’efforts déterminent souvent une fissuration de la section de béton armé et donc une réduction locale des efforts au pic et une redistribution des efforts.
Il est parfois utile - et c’est admis - de faire une redistribution des moments de flexion. Il faut faire la distinction entre :
-
l’Etat Limite de Service (possibilité de redistribution limitée, prenant en compte l’affaiblissement de la rigidité de la section à cause de la fissuration du béton dans la zone fortement sollicitée du pic) ;
-
l’Etat Limite Ultime (possibilité de redistribution plus large : même phénomène que celui pris en compte pour l’ELS avec en plus les possibilités de redistribution plus larges indiquées dans l’Eurocode 2 aux paragraphes 5.5 « Analyse élastique-linéaire avec redistribution limitée des moments » et 5.6 « Analyse plastique ».
Il faut cependant signaler que les recommandations professionnelles pour l’application de la norme NF EN 1992-1-1 (NF P 18-711-1) autorisent, pour les bâtiments, à utiliser à l’ELS, une redistribution des moments avec les mêmes coefficients de redistribution qu’à l’ELU.
Dans le cadre des Eurocodes, le rapport δ du moment après redistribution au moment élastique de flexion, doit être supérieur ou égal à 0,7 pour des armatures longitudinales de classe A et à 0,8 pour des armatures longitudinales de classe B ou C.
Cette redistribution des moments dans une poutre continue est possible si la poutre ne participe pas au contreventement. Elle est plus délicate si la poutre appartient à une ossature en portique (attention aux moments élastiques provenant de l’effet portique).
Il ne faut pas oublier de prendre en compte l’incidence de la redistribution des moments fléchissant sur les efforts tranchants.
$translationBooksD.6 Comprendre et analyser les pics (cas d’un assemblage métallique)
D.6 Comprendre et analyser les pics (cas d’un assemblage métallique)
Les résultats d’un calcul réalisé sur un modèle éléments finis surfaciques (éléments de type plaques ou coques) peuvent présenter des pics de contraintes (ou singularités). La présence de pics de contraintes n’est pas contrariante s’ils sont localisés dans des zones hors d’intérêt vis-à-vis des objectifs de l’étude et si leur présence est justifiée.
Il faut garder à l'esprit qu'un pic de contraintes, c'est à dire une contrainte très élevée, doit concerner deux ou trois nœuds, voire un seul nœud au maximum (mais la structure peut cependant présenter plusieurs pics de contraintes).
Lors du dimensionnement d’un assemblage de tôles soudées entre elles (caisson de pont métallique au droit d’un appui par exemple), la réalisation d’un modèle aux éléments finis surfaciques s’avère nécessaire pour une prise en compte correcte de la diffusion des efforts. Et bien sûr, à partir du même modèle, les contraintes dans les tôles pourront être extraites pour procéder au dimensionnement de l’assemblage de ces tôles.
Néanmoins, l’idée générale restera de toujours conserver un regard critique sur les résultats obtenus. Ceux-ci devront être analysés convenablement avant de pouvoir les considérer fiables vis-à-vis des objectifs de l’étude menée.
Cette analyse sur la fiabilité des résultats bute souvent sur l’interprétation de la présence éventuelle de pics de contraintes.
L’objet de ce paragraphe est de donner des pistes pour aider le modélisateur à qui il appartient d’évaluer le caractère gênant ou non d’un pic de contrainte.
Les apparitions de pics de contraintes peuvent avoir différentes origines dont les principales sont :
-
la présence ou l’omission de détails tels que des congés de raccordement ;
-
des incohérences de maillage ;
-
la mise en place des chargements et des conditions aux limites.
D.6.1 Modélisation – Détails
Avant de se lancer dans la modélisation surfacique d’un assemblage de tôles, il est indispensable de connaître et de maitriser les outils CAO du logiciel et ses capacités de maillage.
Il est d’usage lors de la création de la géométrie de négliger certains détails. Deux cas parmi d’autres :
-
les congés de raccordement – si les congés de raccordement d’une ouverture dans l’âme d’une poutre ne sont pas représentés, on obtiendra inévitablement des concentrations de contraintes d’autant plus élevées que les sollicitations de l’âme sont importantes et que l’angle est aigu (cas des arêtes d'ouverture non perpendiculaires) ;
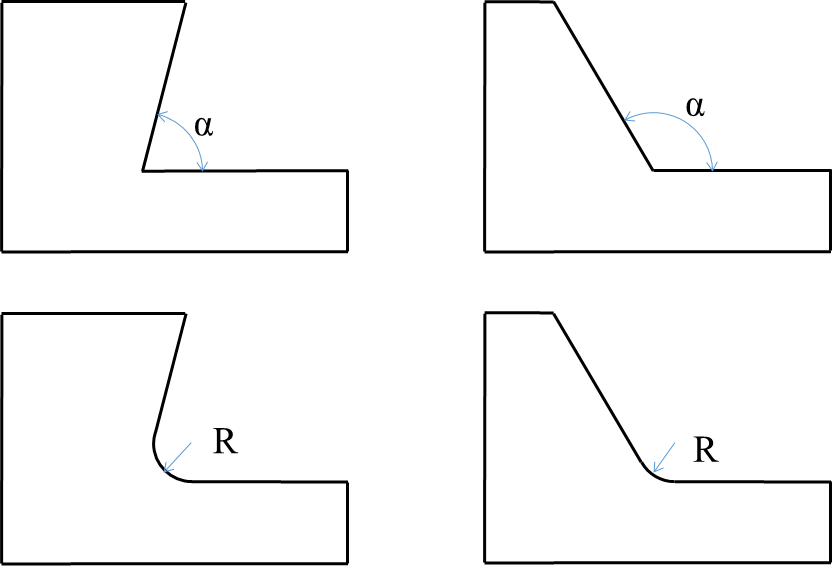
Note 1 : La modélisation d’un congé de raccordement ne créera plus un pic de contrainte, mais une simple concentration de contraintes. Les abaques de concentrations de contraintes sont basés sur ce type de modélisation.
Note 2 : En mécanique de la rupture, le modèle de fissure caractérisé par un angle nul est un cas particulier utilisé pour modéliser la propagation des fissures qui est basée sur la notion de facteur d’intensité des contraintes.
-
les raidisseurs transversaux – les poutres principales d’un ouvrage d’art nécessitent, au droit des zones d’appuis, des raidisseurs transversaux. La modélisation de ces raidisseurs est souvent nécessaire au vu des efforts pouvant transiter dans cette zone et venant solliciter localement l’âme. De par les règles de l’art, ces raidisseurs ont une géométrie particulière et trop souvent cette géométrie est simplifiée à l’extrême au cours de la modélisation ;
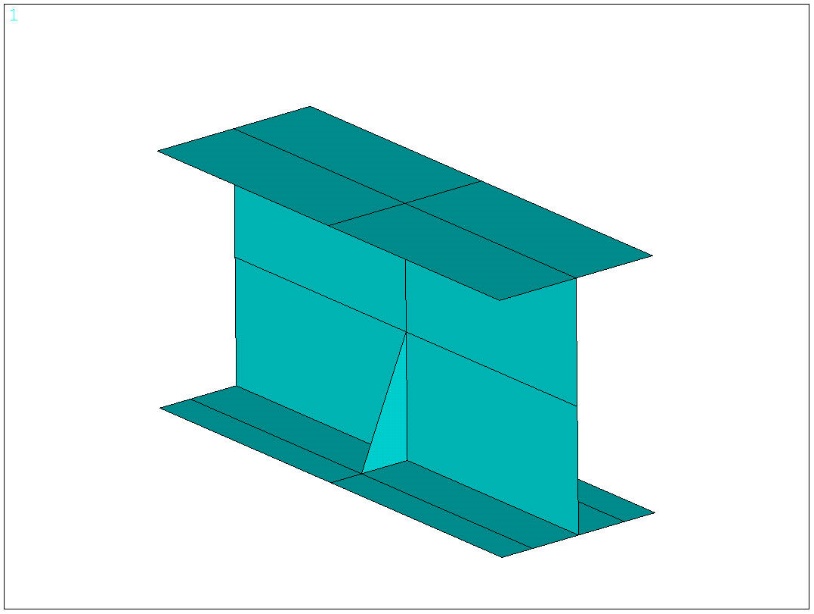
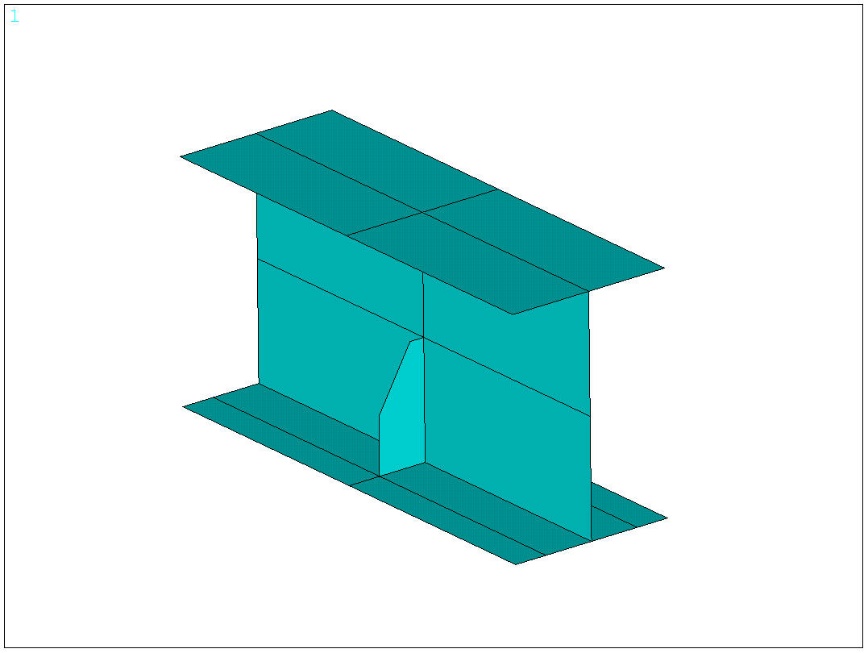
Géométrie réelle / Géométrie simplifiée
La transition des efforts peut ne pas être affectée mais le maillage du raidisseur sera à piloter de manière à ne pas se retrouver avec des éléments dégénérés pouvant créer des singularités. Et à la pointe du raidisseur, un pic de contraintes peut apparaître lequel en cas de mauvaise interprétation peut amener à de fausses conclusions. Voir également le § C.3;
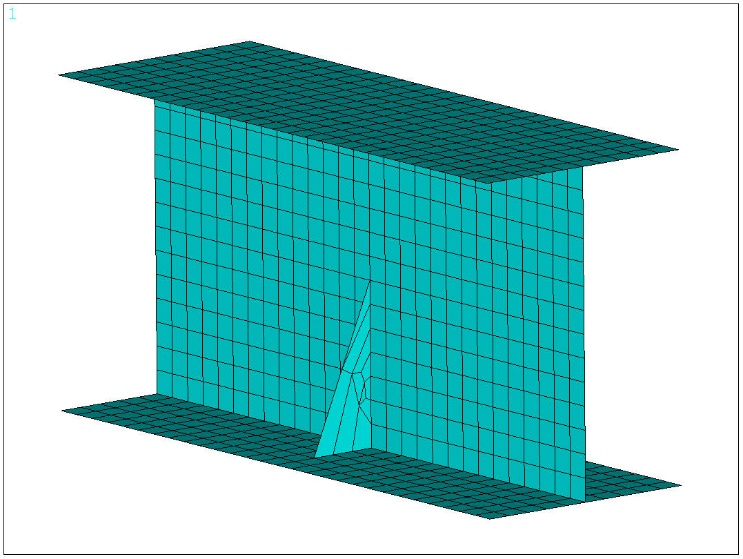
-
les détails tels que congés de raccordement, trous de souris, chanfreins, etc. peuvent donc ne pas être modélisés si leur localisation est hors d'une zone d’intérêt. Le temps passé à la modélisation de détails peut ne pas être négligeable, mais si l’objectif de la simulation est de calculer une contrainte ou une déformation dans une zone présentant de tels détails, il est indispensable de les modéliser et, de plus, d’y associer un maillage représentatif.
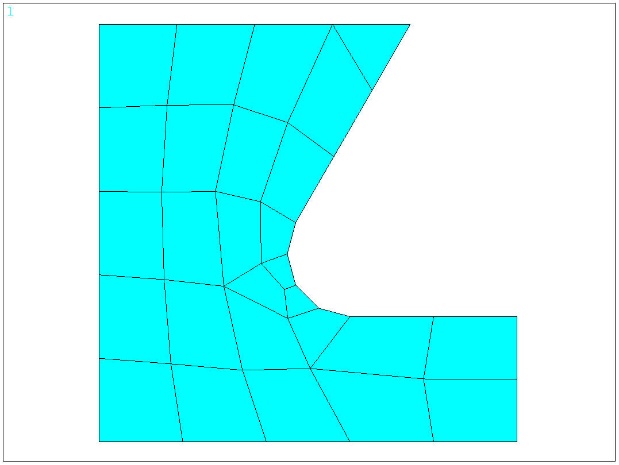 .
. 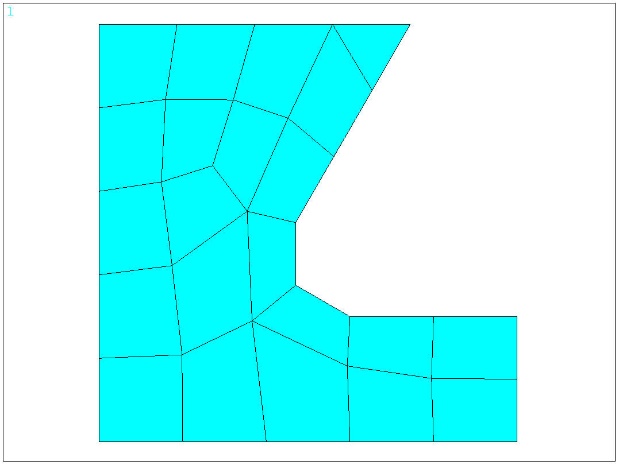
Maillage non représentatif / Maillage représentatif
En l’absence de plans détaillés des détails constructifs à modéliser, on s’appuiera sur les dispositions constructives et règles de l’art, lesquelles, en matière d’assemblages métalliques (congés de raccordement, plats locaux, raidisseurs, etc.), donnent des bases conduisant en général à une diffusion satisfaisante des efforts. Par exemple, les recommandations de la CNC2M pour le dimensionnement des poutres en acier avec ouvertures dans l’âme selon la NF EN 1993 précisent que, pour une ouverture rectangulaire, le rayon des congés de raccordement doit être supérieur ou égal à deux fois l’épaisseur de l’âme sans être inférieur à 15 mm, ou encore qu'une ouverture isolée présentant une dimension maximale inférieure à 10% de la hauteur de l'âme de la poutre n'est pas considérée comme significative (cette ouverture doit néanmoins être prise en compte lors de la vérification de la section).
Dans certains cas, on ne peut pas négliger la prise en compte des détails (voir également le § C.2.2). Par exemple, lors d’une vérification à la fatigue des assemblages d’une dalle orthotrope, on peut utiliser des modèles simplifiés de calcul décrits dans les règlements de calcul. Mais ces modèles sont sécuritaires et, si la résistance à la fatigue n’est pas justifiée avec ces approches simplifiées, deux possibilités s'offrent au projeteur :
-
soit modifier la géométrie des pièces assemblées, ce qui est souvent difficile en phase d’exécution ;
-
soit procéder à un calcul plus raffiné sur un modèle éléments finis en plaques.
Pour tenir compte des effets du passage d’un véhicule (effets longitudinaux et transversaux, lignes d’influence), il peut être nécessaire de modéliser une longueur assez conséquente de l’ouvrage. En revanche, la zone de modélisation des détails peut être limitée.
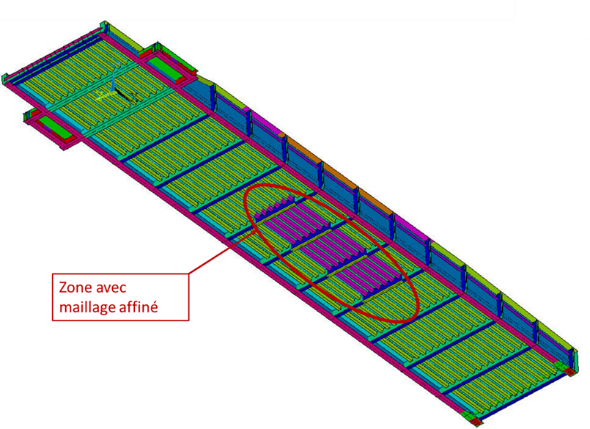
D.6.2 Modélisation – Création du modèle surfacique et maillage
Il convient également de bien appréhender les capacités de maillage du logiciel. La plupart des logiciels peuvent mailler de façon automatique un assemblage de plaques, aussi complexe soit-il.
L’intervention de l’utilisateur peut alors se limiter à la définition de quelques paramètres tels que la taille moyenne des éléments ou leur forme (quadrangulaires, triangulaires). Il vaut mieux cependant avoir la possibilité de pouvoir piloter le maillage en choisissant l’ordre des surfaces à mailler, en venant imposer des tailles de maille plus fines dans certaines zones, ceci afin d’éviter la présence d’éléments dégénérés.
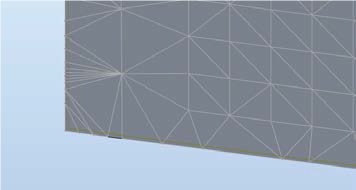
Exemple de maillage dégénéré
Dans un assemblage complexe, du fait de la forme et du nombre de pièces assemblées, le risque de voir se produire des incohérences de maillage est grand. Pour réduire ce risque plusieurs points sont à observer, pour rappel :
-
l’analyse et la perception du fonctionnement RDM de l’assemblage par l’ingénieur au préalable de la modélisation sont fortement conseillées. Certains renforts et certains détails n’ayant qu’un effet très localisé sur le comportement global de l’assemblage peuvent être omis, ce qui permet de réduire le nombre d’interfaces entre plaques ;
-
pour éviter des discontinuités de maillage, toutes les intersections de tôles doivent apparaître. Par exemple dans le cas de la modélisation d’une poutre en I, chacune des semelles apparaîtra composée de deux surfaces identiques de part et d’autre de l’âme. On veillera, au droit de l'intersection de chacune des semelles avec l’âme, à la présence d’une seule ligne commune aux trois surfaces (les deux surfaces constituant la semelle considérée et la surface de l’âme) ;
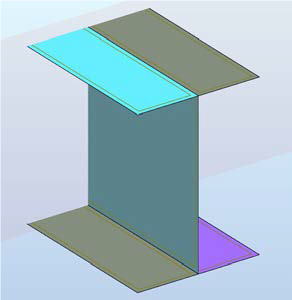
Décomposition en surface élémentaire d’une poutre en I
-
ne pas hésiter à décomposer les surfaces étendues en plusieurs surfaces de forme quadrangulaire, le maillage en sera facilité ainsi que par exemple l'application de charges sous forme de pressions ;
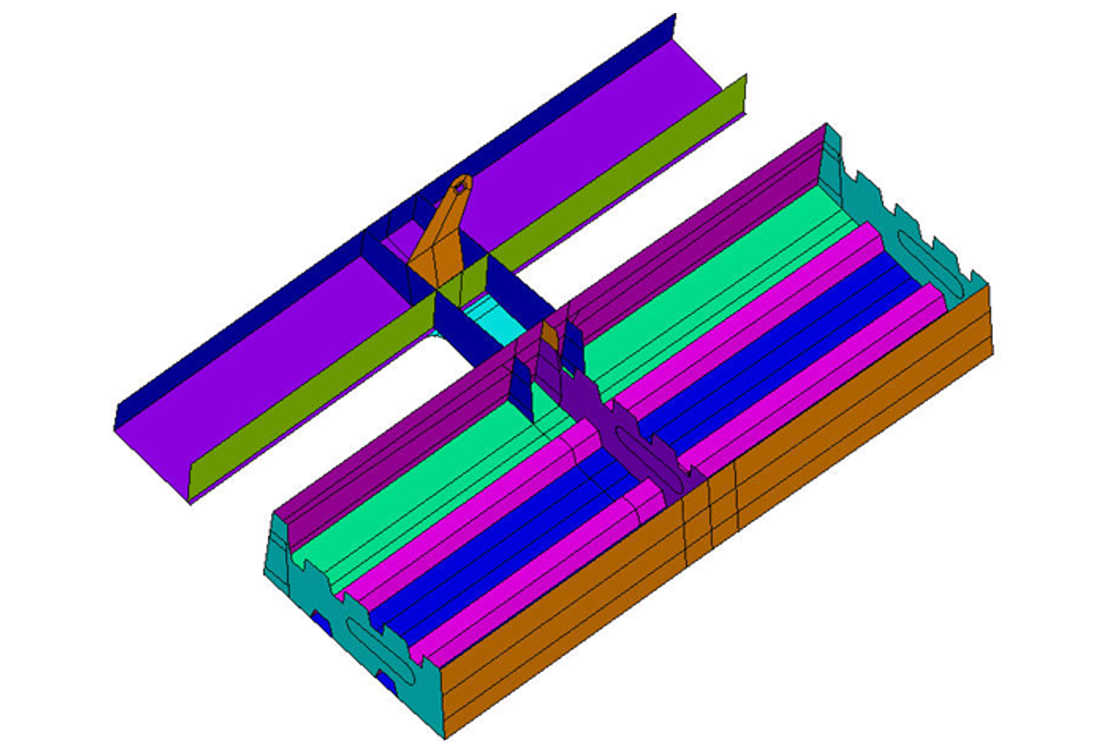
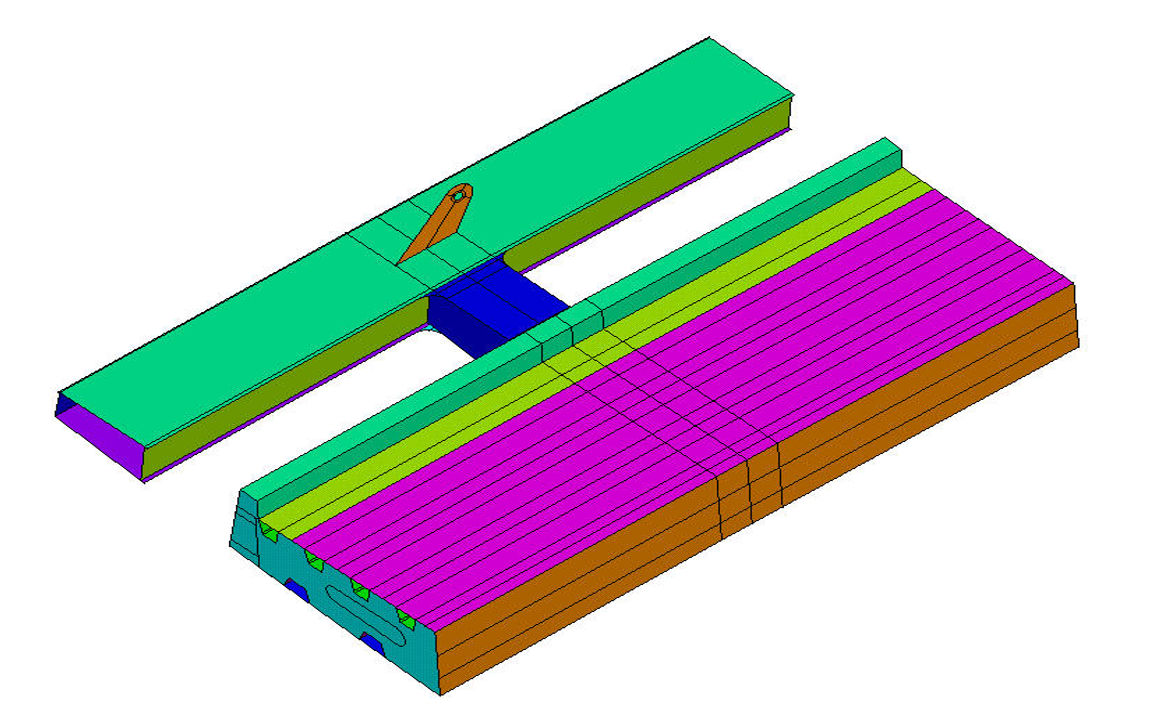
-
La structure de l’ouvrage peut présenter des panneaux ayant une géométrie gauche. Le logiciel peut autoriser la création de surfaces gauches, dans une certaine limite. Par conséquent, selon l’importance du gauchissement, il faudra décomposer le panneau initial en plusieurs sous-panneaux (la frontière commune à deux sous-panneaux étant constituée des mêmes entités). Lors du maillage, les éléments s’appuyant sur une surface gauche présenteront également un gauchissement. Selon les logiciels, la limite du gauchissement admise pour une surface CAO (sur laquelle viendra s’appuyer le maillage des éléments finis) peut être différente de celle admise pour les éléments finis. Dans tous les cas de figure, il est toujours possible d’approximer des éléments gauches à l’aide de surfaces planes triangulaires successives.
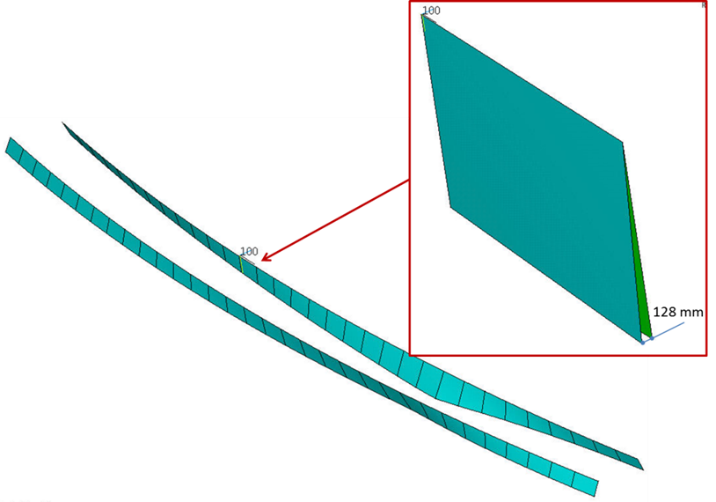
Exemple de panneaux avec des surfaces gauches
-
l’assemblage à modéliser peut présenter des intersections de tubes cylindriques. Si lors du maillage il est fait usage d’éléments sans nœud milieu (éléments à 4 nœuds), le maillage présentera des facettes ; plus la taille des éléments sera grande, plus la taille de ces facettes sera grande. On peut donc réduire cette “facettisation” en augmentant le nombre d’éléments. L’utilisation d’éléments à nœuds milieu peut également être une bonne solution à condition que le logiciel utilisé offre la possibilité aux éléments à nœuds milieu d’épouser la courbure de la surface CAO (ou de la ligne CAO) ;
-
si un tube est connecté à une plaque, attention au niveau de la liaison, à la compatibilité des types d’éléments utilisés (par exemple raccord d’éléments à 4 et à 8 nœuds). On peut dans certains cas obtenir des discontinuités au niveau des résultats (voir § C.6.3) ;
D.6.3 Modélisation – Chargement et conditions aux limites
Une des causes fréquentes de l’apparition de pics de contraintes est la présence d'efforts ponctuels ou de blocages ponctuels.
Si une charge ponctuelle (respectivement un appui ponctuel) mis en place est hors zone d’intérêt, la présence d’un pic de contraintes n’est pas contrariante. En revanche, si elle se trouve dans la zone d’intérêt, plutôt qu’une force ponctuelle, il vaut mieux appliquer la force sur plusieurs nœuds (respectivement bloquer plusieurs nœuds).
Comme décrit dans les chapitres précédents, dans la réalité, les forces ponctuelles et les appuis ponctuels n’ont pas de sens physique (on note néanmoins que dans un modèle de poutre filaire, les appuis ponctuels ne créent pas de pics).
Application pratique :
Considérons une poutre HEB modélisée en éléments de plaques. Un pic de contraintes apparaitrait, si le torseur d’effort dans une section était appliqué en un nœud. Il vaut mieux se rapprocher de la réalité, en transformant le torseur d’effort en contraintes normales et tangentes (sous forme d’efforts linéaires, le cas échéant) et procéder comme suit :
-
l’effort normal sera réparti sur l’ensemble des nœuds de la section d’extrémité ;
-
l’effort tranchant sera réparti sur l’ensemble des nœuds de l’âme de la section d’extrémité ;
-
le moment sera décomposé en deux efforts répartis sur l’ensemble des nœuds des deux semelles de la section d’extrémité.
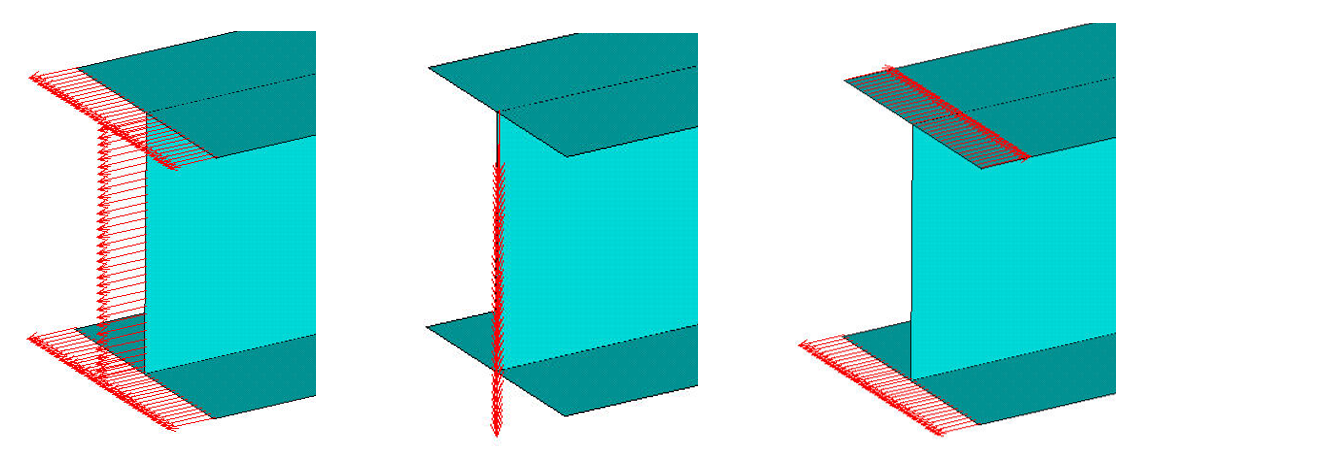
Effort normal / Effort tranchant / Moment fléchissant
Il en sera de même pour modéliser les appuis de la poutre. Considérons les deux cas suivants :
-
poutre de plancher bi-articulée (assemblage par cornières d’âmes aux extrémités) soumise à une charge répartie. On va considérer deux cas se différenciant par la mise en place des conditions aux limites ;

1er cas : en chacune des extrémités, mise en place d'un blocage vertical ponctuel (le blocage transversal de deux nœuds est effectué pour stabiliser la poutre en rotation autour de son axe).
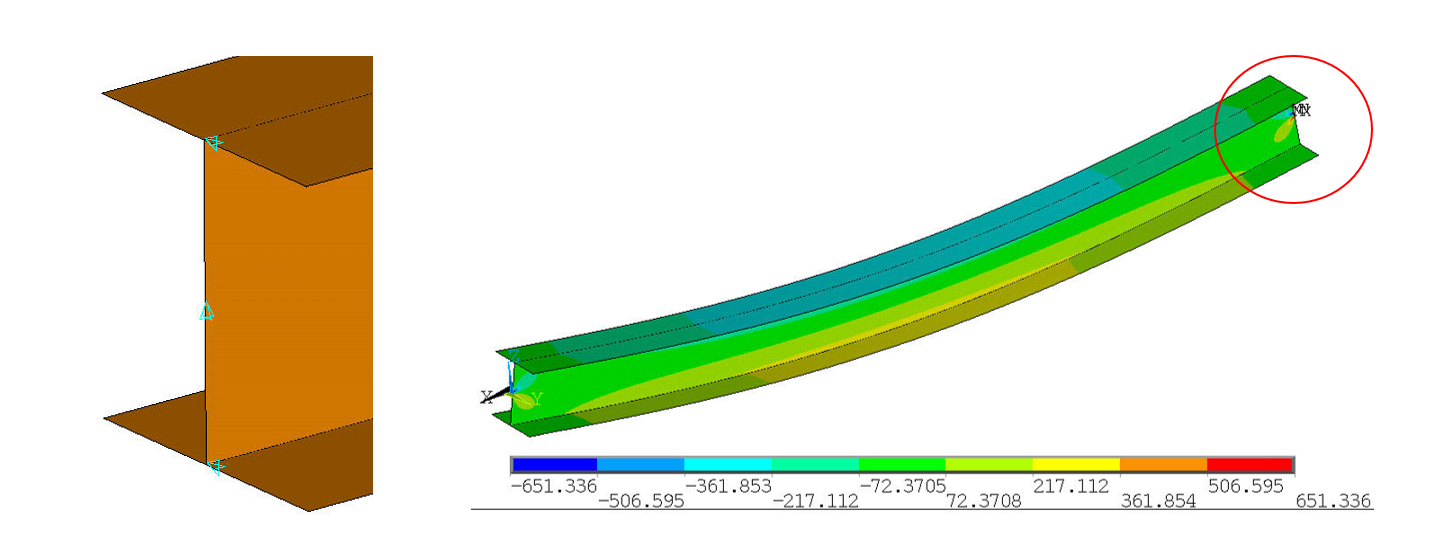
1er cas - conditions aux limites / iso-contraintes longitudinales (en MPa) – la zone du pic de contraintes est entourée
2ème cas : en chacune des extrémités on effectue le blocage vertical et transversal des nœuds d’une partie de l’âme afin de se rapprocher de la réalité.
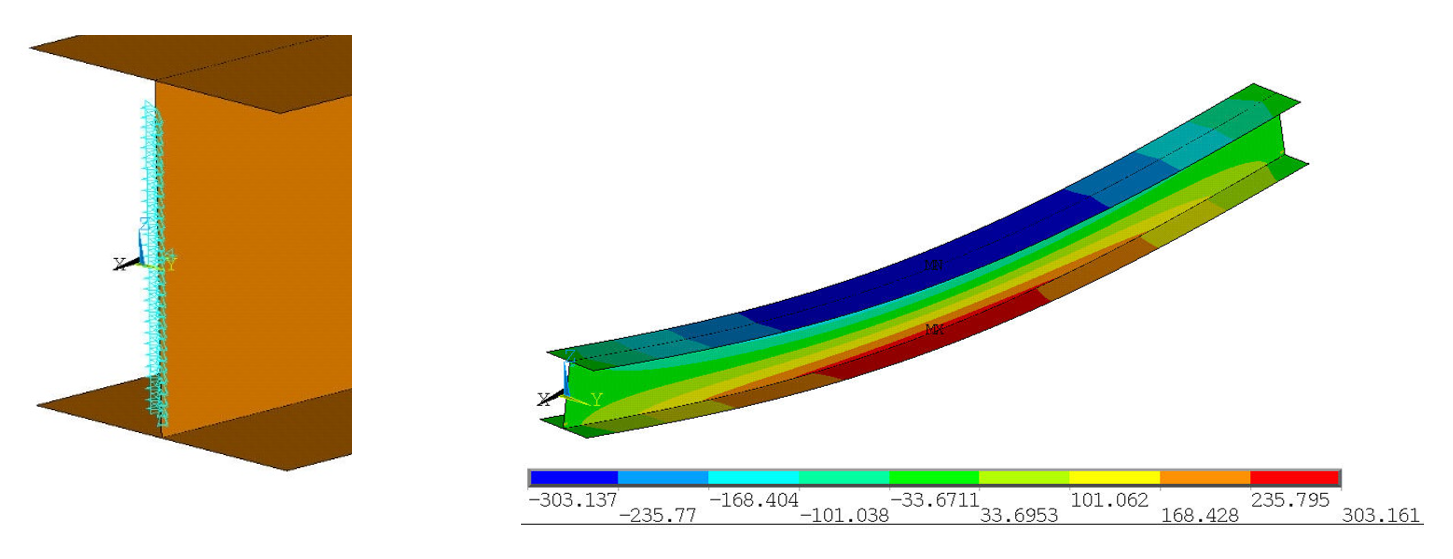
2ème cas - conditions aux limites / iso-contraintes longitudinales (en MPa)
Les pics de contraintes apparaissant dans le 1er cas sont donc dus à la présence d’une réaction nodale ponctuelle. Cependant, en observant les résultats uniquement sur la partie centrale de la poutre, on retrouve des résultats identiques à ceux du 2ème cas.
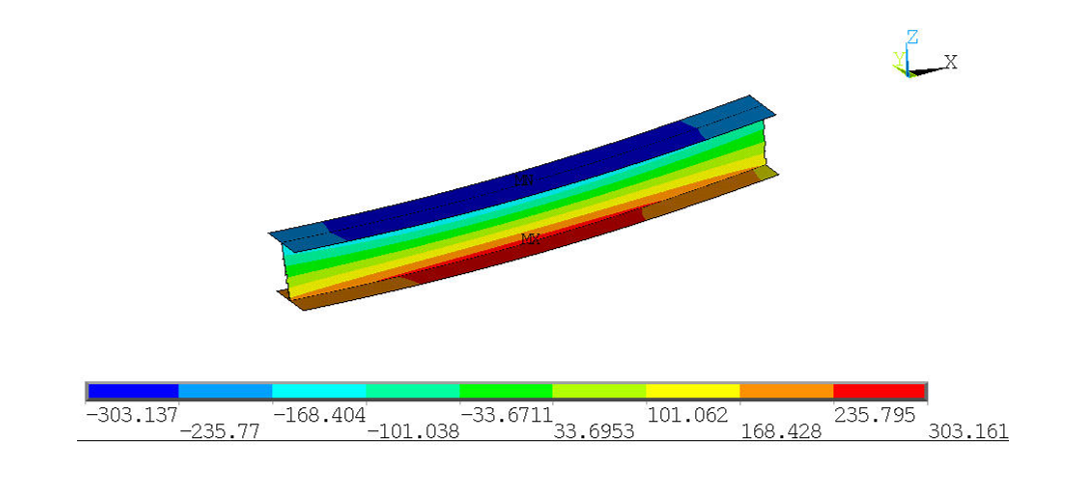
1er cas – partie centrale – iso-contraintes longitudinales (en MPa)
-
poutre bi-appuyée (appuis sous semelle inférieure) soumise à une charge répartie. Dans un premier temps, on ne modélise que la poutre (de type H) et on applique des conditions aux limites telles que, à proximité de chacune des deux extrémités, les nœuds de la semelle inférieure sont bloqués suivant la direction verticale.
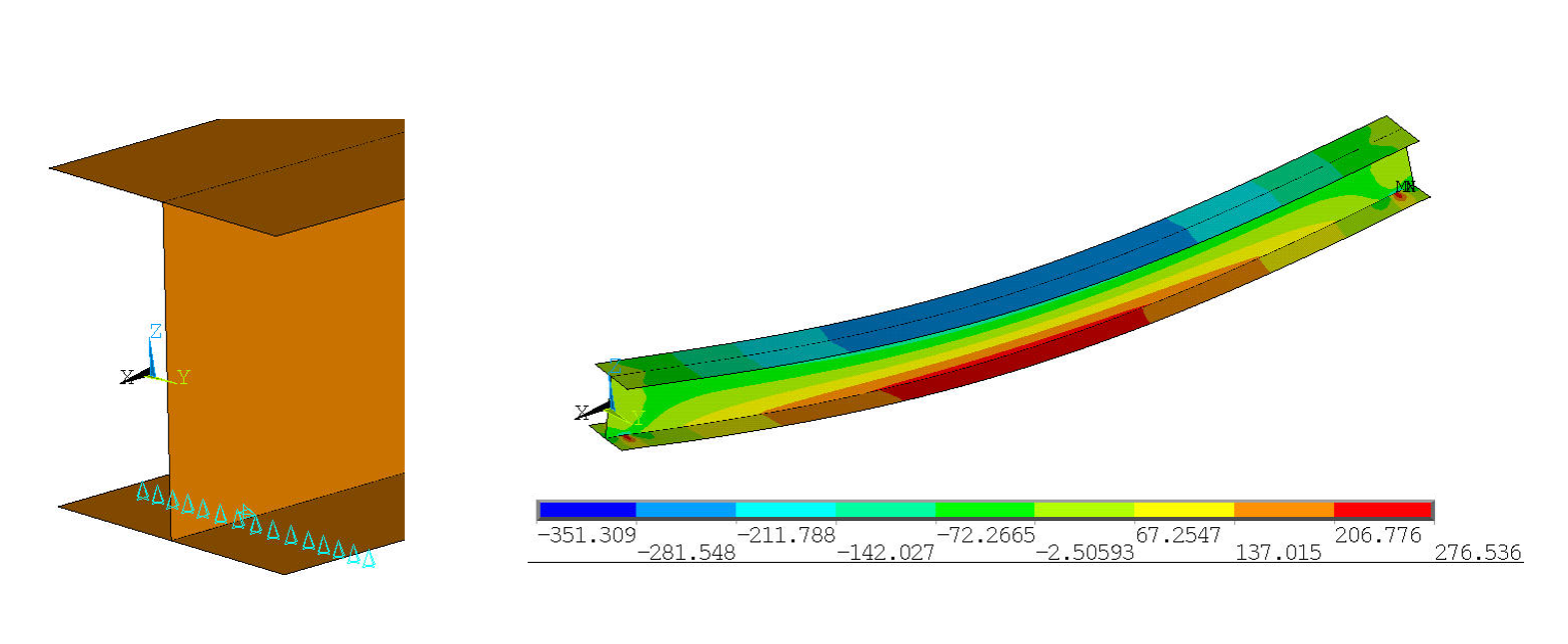
Cas sans raidisseurs - conditions aux limites / Iso-contraintes longitudinales (en MPa)
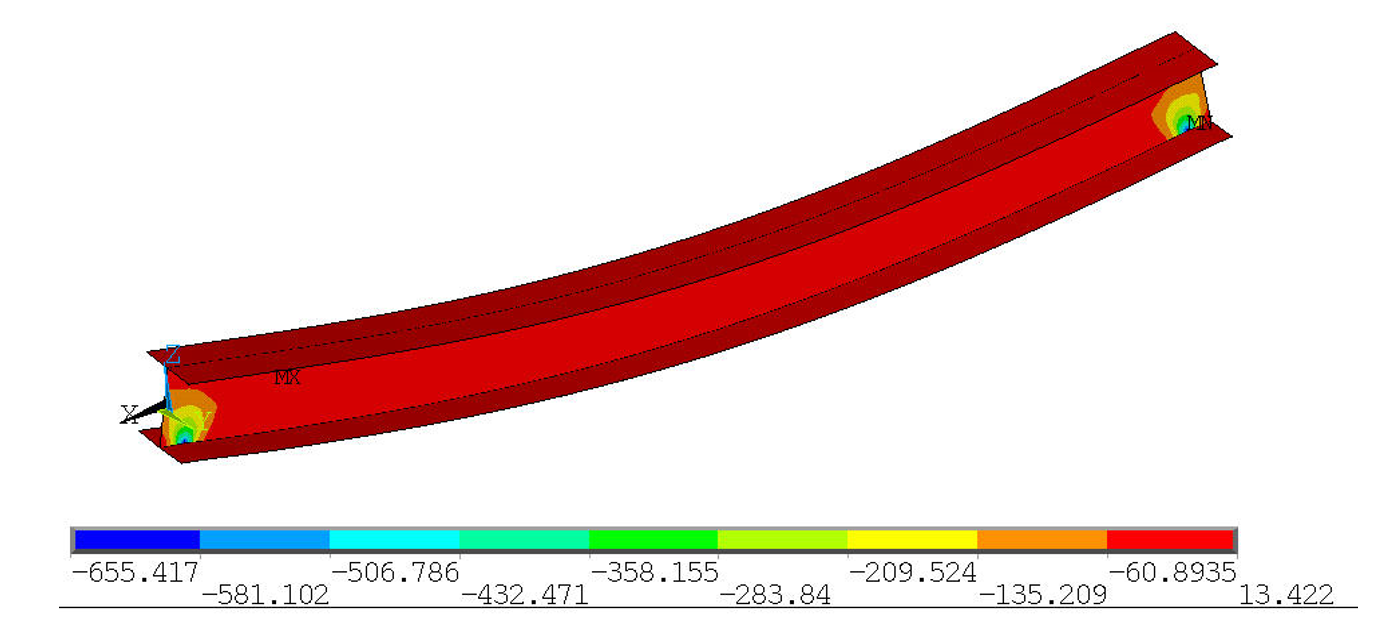
Cas sans raidisseurs - iso-contraintes verticales (en MPa)
Des pointes de contraintes apparaissent à l’intersection âme/semelle inférieure malgré le fait que le blocage vertical ait été effectué sur plusieurs nœuds. Le problème ici est plutôt un problème de conception. Il est d’usage au droit des appuis de mettre en place des raidisseurs transversaux (voir les règlements de calcul concernant la résistance aux forces transversales de l’âme des poutres et les vérifications au voilement local). Si nous reprenons le modèle en ajoutant des raidisseurs transversaux au droit des appuis, les pics de contraintes au droit des appuis disparaissent.
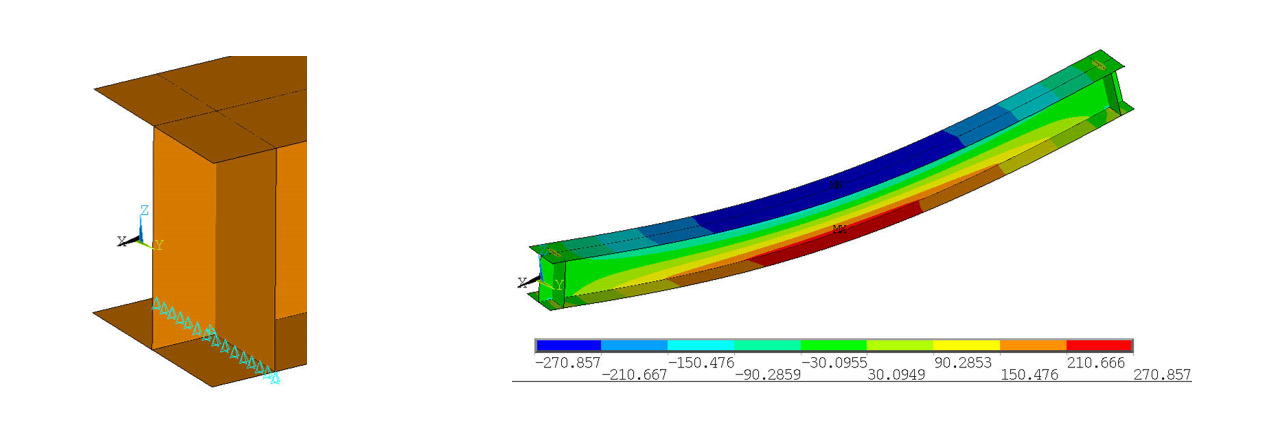
Cas avec raidisseurs - conditions aux limites / iso-contraintes longitudinales (en MPa)
Les pics de contraintes apparaissant en l'absence de raidisseurs sont donc dus à un problème de conception. Cependant, en observant les résultats uniquement sur la partie centrale de la poutre, on retrouve des résultats similaires au cas avec raidisseurs.
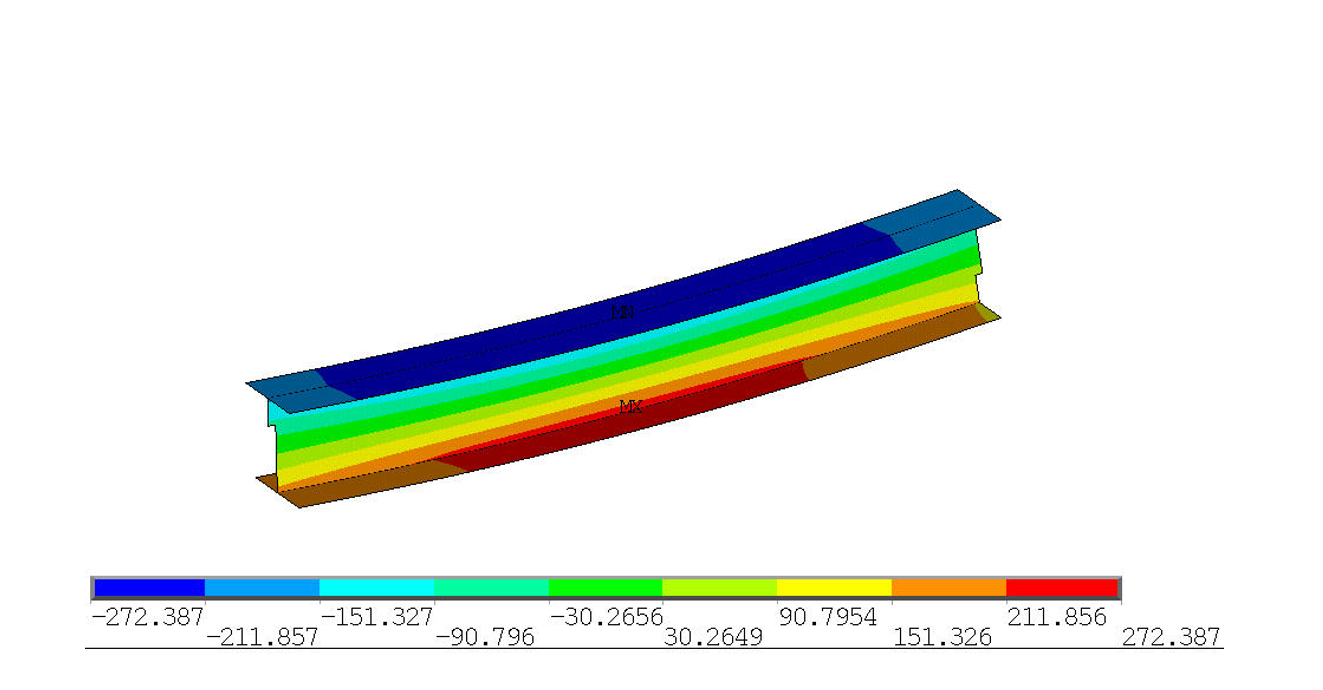
Cas sans raidisseurs – partie centrale – iso-contraintes longitudinales (en MPa)
D.6.4 Analyse des résultats – Validation du modèle
La modélisation étant terminée, en ayant respecté au mieux les conseils énoncés précédemment, le calcul est exécuté. Il convient d’analyser attentivement tous les messages que peut générer le logiciel. Généralement un message d’erreur bloquera le solveur, contrairement aux messages d’avertissement qui devront être analysés et interprétés avec soin. Il est recommandé de ne pas passer outre ces messages sans en avoir bien évalué les conséquences possibles, quitte à mobiliser la hotline de l’éditeur.
Il convient de bien appréhender les capacités offertes par le logiciel pour l’affichage et les types de résultats. Voici une liste non-exhaustive de paramètres au sujet desquels il convient de s’interroger :
-
le repère dans lequel sont affichés les efforts et moments, les déplacements ou les contraintes : s'agit-il du repère global du modèle, des repères locaux des éléments, de repères nodaux? ;
-
les conventions de signe des efforts et contraintes ;
-
la convention utilisée par le logiciel pour la dénomination des forces et moments : par exemple certains logiciels appellent My le moment autour de l’axe Y tandis que, pour d’autres, il correspond au moment parallèle à la direction Y. Ceci est particulièrement vrai lors de l’utilisation de torseurs fournis par un tiers ;
-
les différentes contraintes : contraintes directionnelles, contraintes principales, contraintes équivalentes de Von Mises … ;
-
le type de contraintes affichées et la manière dont elles sont calculées : contraintes aux nœuds ou aux éléments, en surface moyenne ou en peaux ;
-
les possibilités d’extraction des contraintes aux points de Gauss ;
-
la pertinence de l’échelle d’affichage des contraintes qui peut fausser l’interprétation des résultats.
Dans l’exemple ci-dessous, des contraintes largement supérieures à la limite élastique apparaissent sur des pics localisés.
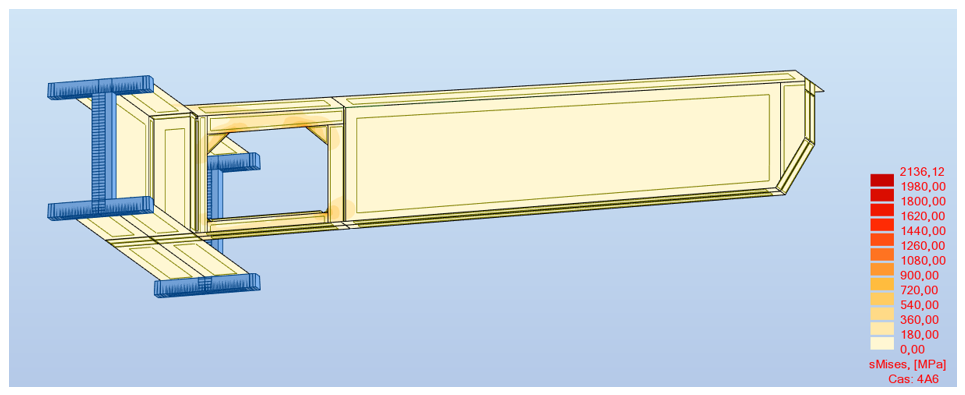
Exemple d'échelle non adaptée à une analyse des contraintes
Un bornage supérieur de l'échelle, possible avec de nombreux logiciels, permet de faire apparaître les zones impactées par les dépassements :
Bornage de l'échelle
Les paramètres d’exploitation du logiciel étant bien appréhendés, avant toute exploitation des résultats et analyse de pics de contraintes subsistant éventuellement, il convient de procéder à quelques vérifications simples pour valider le modèle de calcul :
-
contrôler les descentes de charges (réactions d’appui) afin de s’assurer que l’intégralité des charges introduites se retrouve bien au niveau des appuis déclarés du modèle ;
-
contrôler l’allure de la déformée globale de la structure ;
-
contrôler l’ordre de grandeur des déplacements et leur compatibilité avec les conditions aux limites imposées à la structure et le(s) chargement(s) appliqué(s).
Il s'agit finalement des contrôles fondamentaux qu'il est nécessaire de réaliser pour toute modélisation aux éléments finis (voir le § E.2 Autocontrôle).
D.6.5 Analyse des résultats – Acceptation des pics de contraintes résiduels
Nous l’avons déjà dit, il est possible d'utiliser un modèle présentant des pics de contraintes à condition d’avoir la certitude que ces pics ne perturbent pas le résultat des objectifs de l’étude. En tout état de cause, il appartient à l’ingénieur d’évaluer le caractère gênant ou non d’un pic de contraintes à l’aide de son expérience et de son esprit critique.
-
Zone modélisée sans prise en compte de détails de conception
La mise en place de congés de raccordement ou de raidisseurs locaux a pour but d’assurer entre autres une meilleure diffusion des efforts. Les dispositions constructives et les règles de l’art en matière d’assemblages métalliques vont dans ce sens.
Par conséquent, la non-modélisation d’un détail constructif va probablement se traduire par un pic de contrainte.
Pour autant, la modélisation du détail constructif ne nous exempte pas de la présence d’une concentration de contraintes d’autant plus forte que le maillage de la zone locale du détail est plus grossier. Des tests de sensibilité à la taille des éléments peuvent être réalisés afin de bien appréhender les résultats affichés. Les abaques de concentration de contraintes peuvent également s’avérer utiles.
Exemples de concentrations de contraintes au niveau de singularités
Les concentrations de contraintes présentant un pic avec des valeur supérieures à la limite élastique du matériau peuvent être acceptables à l’ELU si elles se trouvent très localisées et en peaux. Néanmoins, leur justification peut nécessiter parfois la réalisation d’un calcul élasto-plastique, surtout si la zone de contraintes dépassant la limite élastique est traversante (risque d’apparition de rotules plastiques). Si le logiciel l’autorise, ce calcul élasto-plastique est réalisé en considérant une loi de comportement bi-linéaire du matériau. L’Annexe C (informative) de l’EN 1993-1-5 autorise une valeur limite de la déformation maximale de 5% pour les zones en traction. Pour les zones en compression, il convient de rester vigilant vis-à-vis des phénomènes de voilement locaux.
-
Zone présentant une singularité de maillage
Le maillage des zones d’intérêt doit être adapté aux champs de contraintes ou de déformations attendues.
Si le maillage est mal adapté avec, par exemple, des changements brusques de taille, des sauts de contraintes d’un élément à l’autre sont à craindre. Une discrétisation défaillante se traduira par des écarts importants entre les résultats de la simulation et la réalité. Ces écarts peuvent être réduits en procédant à une étude de sensibilité du maillage : on estime que le maillage est satisfaisant lorsque le raffinement entraîne une variation faible du résultat ; par exemple une variation inférieure à 5% pour des tailles d’éléments divisées par 2). Mais attention, ce n’est pas parce qu’un résultat semble stabilisé à 5% que l’on approche la réalité à 5%.
Il n’est pas nécessaire de raffiner le maillage sur la totalité du modèle. La plupart des logiciels permettent d’afficher des cartes d’erreur permettant de localiser les zones à fort saut de contrainte. Certains logiciels permettent même de corriger automatiquement le maillage afin de réduire ces écarts (maillage adaptatif).
-
Zone avec effort ponctuel ou blocage ponctuel
Nous avons présenté précédemment les effets de la mise en place d’un effort ou d’un blocage ponctuel.
Cependant, même en ayant pris le soin de répartir la charge sur plusieurs nœuds, il se peut que des concentrations de contraintes apparaissent avec des valeurs maximales supérieures à la limite élastique du matériau. Cette situation peut néanmoins être tout à fait admissible selon l’objectif de l’étude et de la modélisation. Prenons le cas, par exemple, de la modélisation de la zone d’attache d’une suspente. L’effort provenant de la suspente est réparti suivant une répartition sinusoïdale sur les nœuds de la moitié de la circonférence de l’alésage (trou).
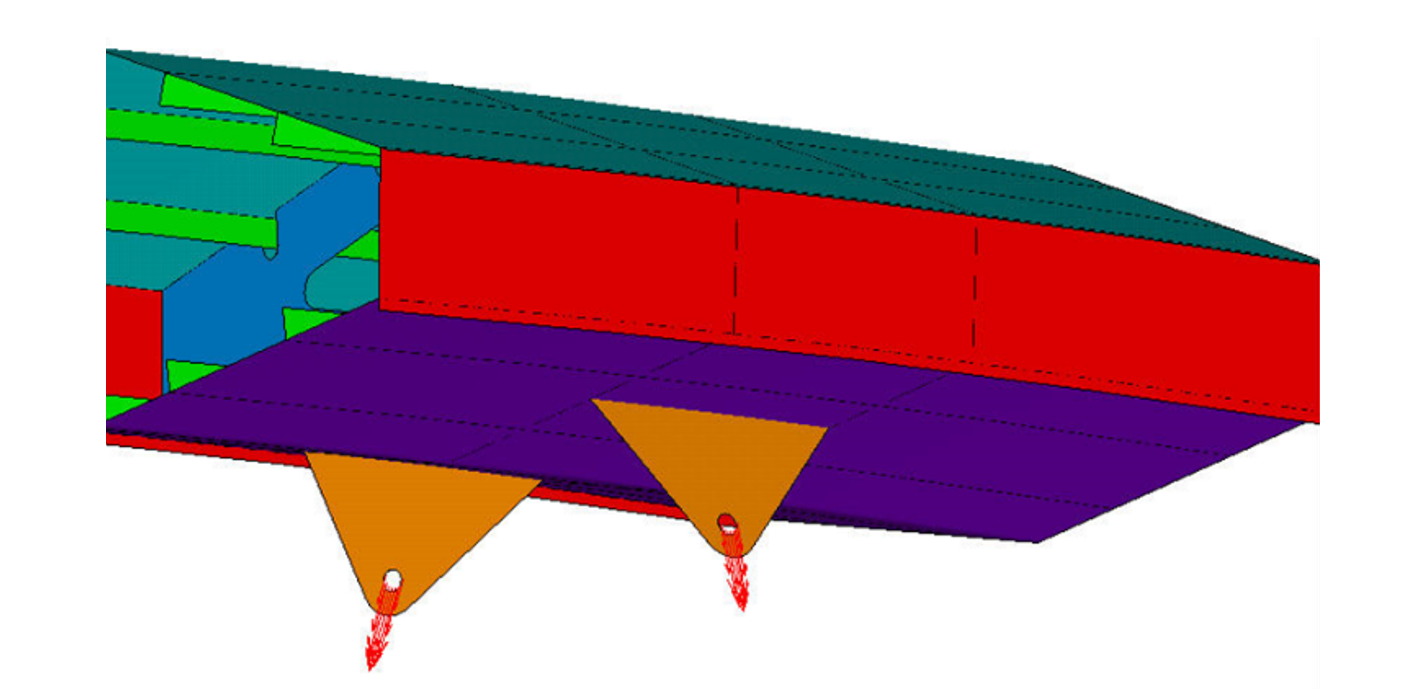
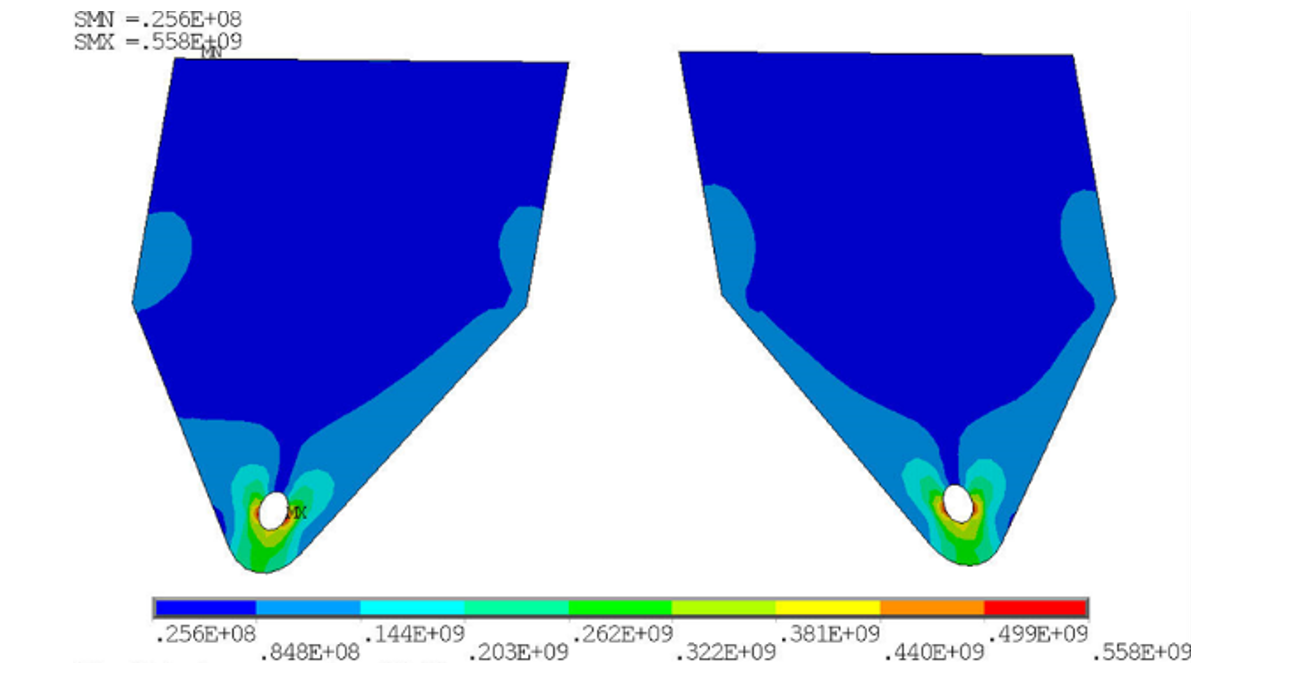
Nous obtenons une concentration de contraintes autour des alésages des axes dont la valeur maximale est de 558 MPa, valeur bien au-delà de la limite élastique de 400 MPa. Cependant, cette valeur maximale n’est pas à comparer à la limite élastique. La concentration de contraintes est due ici à la pression diamétrale et les règlements indiquent que la résistance en pression diamétrale de la plaque est égale à 1,5.t.d.fy. L’épaisseur t de la chape et le diamètre d de l’alésage étant pris en compte de par la modélisation, il convient donc comparer 558 MPa à 1,5 x 400 = 600 MPa.
D.6.6 Synthèse
Si les pics de contraintes sont dus à des singularités (angle rentrant, interface entre deux matériaux différents, efforts ponctuels), ils peuvent être négligés … si l’état de contraintes au voisinage de la singularité ne fait pas partie des objectifs de l’étude EF. Sinon, il convient d’améliorer la modélisation (remplacer l’angle entrant par un congé de raccordement, remplacer la zone de discontinuité entre lois de comportement de matériaux différentes par une zone de transition dans laquelle les paramètres varient de façon continus, remplacer une force ponctuelle par une pression de contact sur une surface non nulle).
Si ces pics de contrainte apparaissent dans des zones hors voisinage d’une singularité, il convient de prendre la peine de raffiner successivement le maillage de ces zones pour connaître le niveau de contraintes plus réaliste.
Concernant le lissage, il n’y pas de méthode simple et directe. Le lecteur pourra regarder ce qui est pratiqué pour les calculs en fatigue, dans le cas d’un gradient de contraintes important au voisinage du pied de cordon de soudure dans les assemblages, avec l’application de la méthode de la contrainte géométrique au point chaud (voir la bibliographie (réf. Hobbacher)).
Concernant la valeur de la contrainte maximale obtenue, elle doit être comparée à la valeur limite précisée par les Normes de Calcul. Pour les aciers, les normes Eurocodes définissent la valeur de la limite élastique selon la nuance de l’acier et l’épaisseur de la plaque ou du tube ; par exemple pour un tube en acier S355 d’épaisseur 35 mm → limite élastique = 345 MPa selon l’EN 10210.
Tout dépassement de cette limite :
-
doit donc être justifié. Et cela peut être paradoxal, mais on aura plus de facilité pour justifier un dépassement de contraintes au droit d’une singularité qu'en zone courante;
-
doit être également acceptable. En cas de dépassement de la limite élastique, une plastification apparaîtra. Un calcul élasto-plastique donnera une information sur la taux de déformation (pour les aciers de construction, l’Eurocode EN 1993-1-5 spécifie une limite de déformation principale maximale de 5%). La norme précise les critères relatifs à l’ELU qui peuvent être utilisés. Pour les zones en traction, il s'agit de l'atteinte d’une valeur limite de la déformation de membrane principale (limite de 5% recommandée) et pour les structures sensibles aux phénomènes de voilement, l'atteinte de la charge maximale.
Rappelons, enfin, qu'un calcul EF (sauf à activer certaines options de calcul très spécifiques) ne permet pas de tenir compte de phénomènes autres que le traînage de cisaillement, par exemple les phénomènes d’instabilité tels que le voilement et le déversement des tôles.
Application numérique : Illustration du chapitre D.6 - Pics dans les angles, incidence du maillage et des congés. Lien vers le fichier.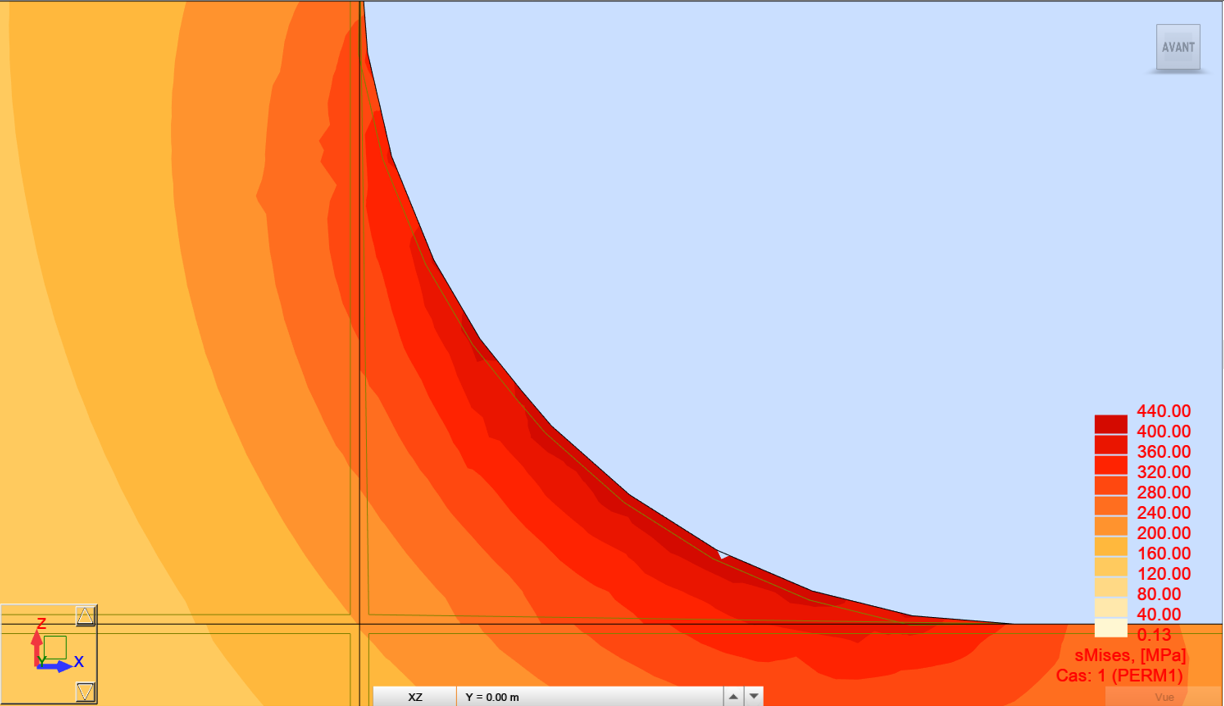
D.7 Compléments spécifiques pour les calculs dynamiques
D.7 Compléments spécifiques pour les calculs dynamiques
D.7.1 Vérification de la masse totale
Dans le cas d’études de type dynamique, l’un des paramètres fondamentaux est la masse de la structure qui sert à déterminer les fréquences propres de celle-ci.
Il est ainsi très important de s’assurer que l’intégralité de la masse de la structure est effectivement entrée dans le modèle. En effet, dans le cas où l’on utilise un modèle qui a déjà servi pour des calculs statiques, il peut arriver que certaines charges permanentes ou variables, telles que des équipements, aient été entrées en tant que charges (ponctuelles, linéaires, surfaciques, etc.) et non en tant que masse. Dès lors, il peut arriver que le programme ne considère pas ces charges comme masses mais uniquement comme des surcharges, et ne les prenne pas en compte dans son calcul de masse. Ceci risque de minorer les efforts sismiques.
Il convient donc de toujours s’assurer que la masse totale de la structure est bien celle recherchée. Cette information est en général accessible dans les résultats de l’analyse modale ou, encore mieux, peut être obtenue en effectuant trois calculs statiques, en appliquant un champ d’accélération unitaire dans les 3 directions (X,Y,Z) : seuls les éléments ayant une masse seront donc pris en compte, et la somme des réactions permettra donc de connaître la masse réellement prise en compte dans le modèle, dans chaque direction.
D.7.2 Vérification des masses participantes
Il convient de vérifier que l’analyse modale effectuée prend en compte suffisamment de modes propres. Pour cela, il faut vérifier que les masses modales participantes dans la direction étudiée et cumulées pour les différents modes calculés, représentent au moins 90% de la masse totale pouvant être mise en mouvement, calculée à partir des cas unitaires d’accélération, sans quoi les normes autorisent la prise en compte d’un pseudo mode (par direction).
Piège : Certains logiciels indiquent des % de masse modales cumulées qui peuvent être basés sur une mauvaise hypothèses de masse totale mobilisée : en effet, les parties de masses bloquées en déplacement par des appuis ne seront pas comptabilisées par le logiciel qui sur-évaluera de ce fait le % modal mobilisé. Une astuce pour pallier ceci est de définir des appuis élastiques avec une forte raideur plutôt que des appuis fixes : la masse totale sera alors exacte.
De manière générale, il est préférable de ne pas modéliser de masse associée à des appuis fixes.
Exemple de l’étude d’un modèle brochette avec 5 degrés de liberté :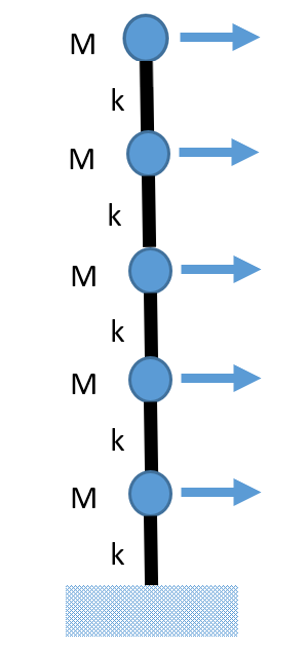
Trois cas sont étudiés :
-
Cas 1 : Masses et raideurs similaires à tous les niveaux ;
-
Cas 2 : Cas 1 mais avec une raideur 100 fois supérieure dans la hauteur du rez-de-chaussée ;
-
Cas 3 : Cas 1 mais avec une raideur 100 fois supérieure dans la hauteur des 2 premiers étages.
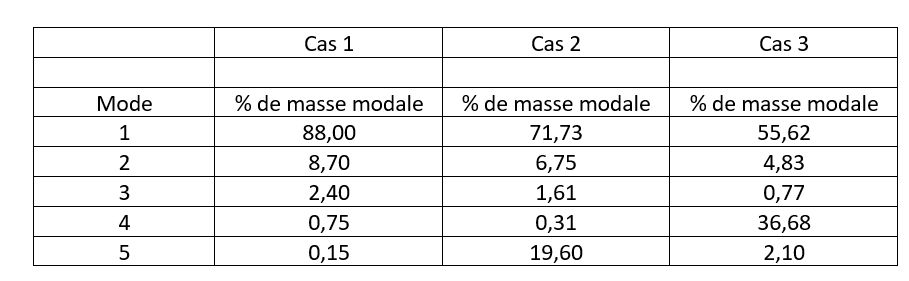
En supposant que toutes les périodes correspondent au plateau du spectre (valeur spectrale identique pour toutes les périodes) :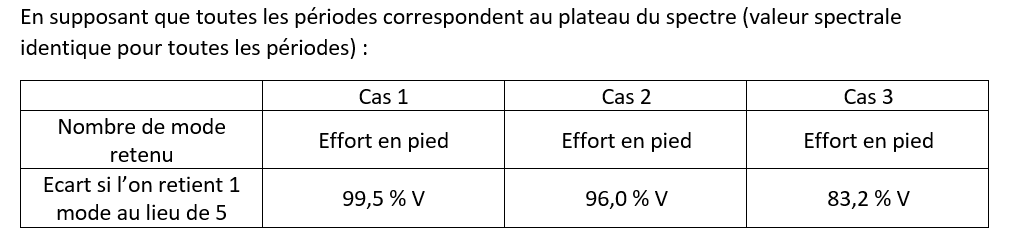
Il est donc important de prendre en compte tous les modes significatifs sinon les efforts de calculs pourraient être notablement sous-estimés.
Piège: Modes symétriques et antisymétriques.
Exemple de vibration d'une poutre
Suivant le type de calcul que l'on effectue, il ne faut pas considérer que les modes qui n'apportent pas de supplément de % de masse modale dans une direction donnée sont forcément sans intérêt.
Cas simple de la poutre sur deux appuis - les masses ne sont mobilisées que verticalement. Le tableau des résultats modaux montre que tous les modes pairs n'apportent pas de supplément de % de masse modale.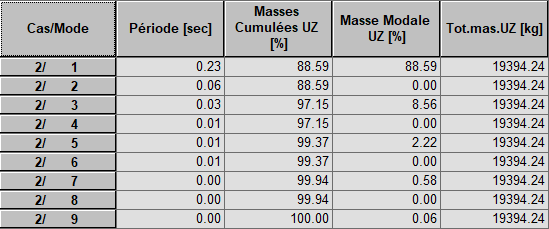
En examinant les déformées modales, on se rend compte que ce sont des modes ayant des déformées antisymétriques:
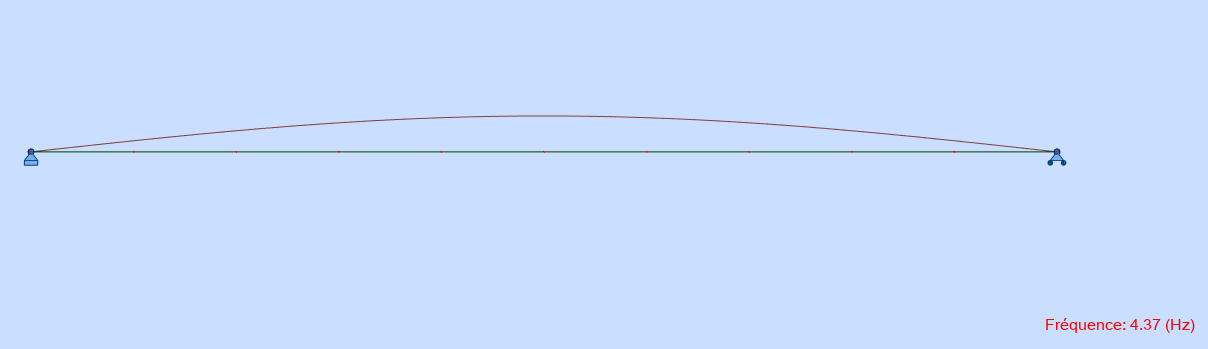
Déformée modale - mode 1
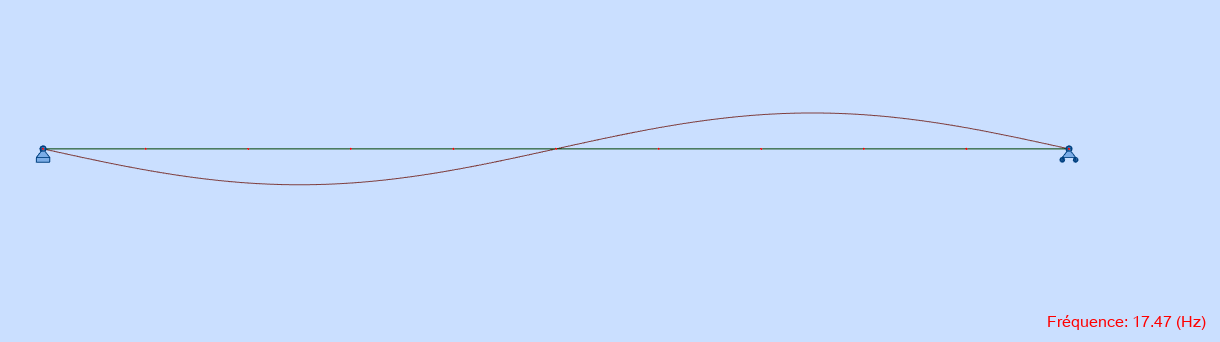
Déformée modale - mode 2
Dans le cas d'un calcul sismique spectral, ces modes n'apportent effectivement rien, par contre dans le cas d'un calcul de vibration d'une poutre ou d'une passerelle, ces modes ont tout leur intérêt. On admet effectivement que des piétons, dans leur mouvements peuvent avoir des actions en opposition et dans le sens la déformée modale. Un calcul harmonique est en effet effectué à partir des charges positionnées tel que ci-après: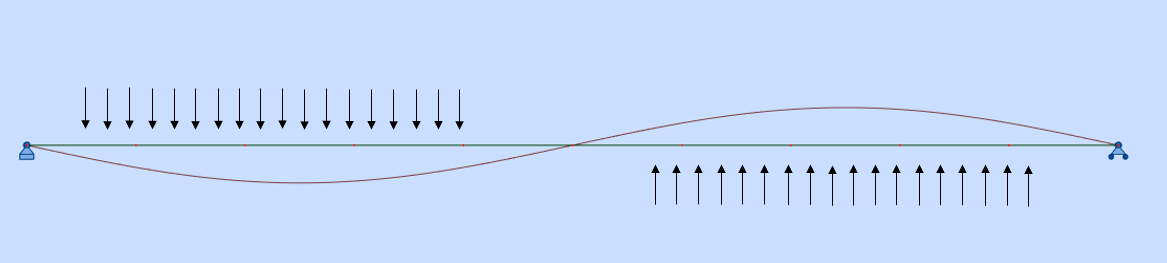
On se référera utilement au guide du Sétra/Cerema sur les passerelles piétonnes pour plus d'informations.
Analyse spectrale: enfin, on donne ci-dessous les efforts au nœud médian de cette poutre, calculée par une analyse sismique spectrale - on constate que les modes pairs n'amènent effectivement aucune contribution.
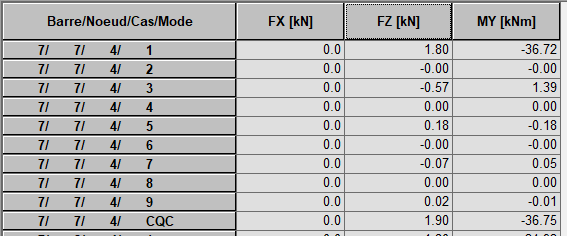
Piège: Modes de torsion
Exemple d'un bâtiment en torsion
Généralement, les bâtiments courants présentent un mode de torsion. Sur l’exemple ci-dessous, on peut observer :
-
Le 1er mode : avec un mode prépondérant selon UY (longitudinal),

-
Le 2ème mode : avec un mode prépondérant selon UX (transversal),
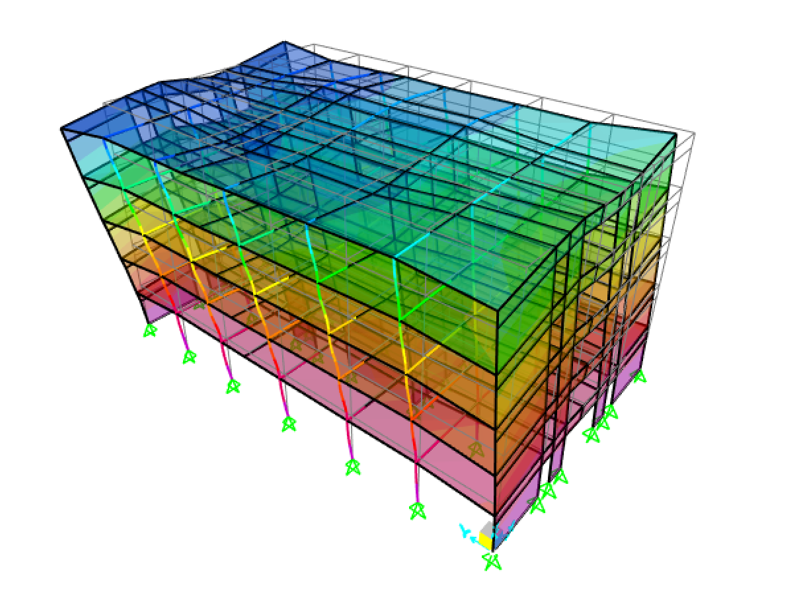
-
Le 3ème mode : avec peu de participation modale alors qu’il affecte notablement la structure. Il s'agit d'un mode de torsion.

D.7.3 Vérification des principales fréquences propres
Afin de vérifier le comportement effectif de la structure en dynamique, il convient de s’assurer que les principales fréquences propres de la structure ont un ordre de grandeur cohérent.
Ces fréquences correspondent aux principaux modes de flexion, torsion, cisaillement, et elles correspondent en général aux modes ayant des facteurs de participation et des masses participantes importantes.
On notera néanmoins que se limiter aux modes ayant un facteur de participation important n’est pas un garant exhaustif des modes pouvant poser problème sous chargement dynamique. En effet, les facteurs de participation peuvent être calculés par les logiciels sur la base des déplacements modaux signés. Ainsi, il peut arriver que les facteurs de participation prenant en compte le cumul des valeurs renvoient des valeurs faibles alors que le mode est important.
Cela peut arriver par exemple pour une poutre continue sur trois appuis identiques et ayant deux portées identiques. Le principal mode de flexion de cette poutre correspond à la flexion d’une travée dans un sens et à la flexion de l’autre travée dans l’autre sens (forme de vague). Le facteur de participation de ce mode peut être très faible, les déplacements d’une travée contrebalançant les déplacements de l’autre travée dans le calcul, alors que ce mode est le principal mode de flexion de la structure, et peut être celui donnant la réponse en accélération la plus élevée si la structure est soumise à une excitation périodique.
Lorsque la structure est complexe, les formules de dynamique données dans la littérature ne permettent pas de retrouver précisément les valeurs de fréquence propre obtenues, puisque ces formules concernent des structures simples (fréquence propre d’une poutre isostatique sur deux appuis, d’une poutre en console, d’une poutre bi-encastrée ou d’un oscillateur à quelques degrés de libertés). Cependant, ces formules classiques permettent d’estimer les ordres de grandeur des principales fréquences propres en estimant de manière simplifiée le comportement de la structure pour se ramener à des fonctionnements simples pour les vérifications.
Dans le cas de structure de type poutre, on pourra ainsi estimer les fréquences propres de flexion à partir des formules classiques. Par exemple, et de manière très large, la fréquence propre de flexion d’une poutre sur deux appuis ayant une souplesse en rotation sera comprise entre la fréquence propre de flexion de la même poutre mais sur appuis rotulés et la fréquence propre de flexion de la même poutre sur appuis encastrés.
D.7.4 Calculs dynamiques sismiques modal/spectral
D.7.4.1 Vérification de la pertinence des premiers modes (instabilités, déplacements)
Les 2 ou 3 premiers modes globaux visualisent le fonctionnement de la structure, ce qui permet d’une part d’en comprendre le fonctionnement, d’autre part de repérer les problèmes de modélisation.
Pour un bâtiment bien dimensionné, les 2 premiers modes sont toujours selon X et Y, le troisième mode est un mode de torsion.
Pour les bâtiments courants, la période fondamentale est de l'ordre de 1/25 à 1/16 du nombre d'étages.
D.7.4.2 Vérification des axes globaux X et Y par rapport aux premiers modes
Il faut vérifier que les directions sismiques étudiées X et Y sont alignées selon les premiers modes importants. Dans le cas contraire, les calculs des CQC seront faussés.
Les solutions sont :
-
dans le cas d’un bâtiment, tourner le modèle selon les axes principaux
-
dans le cas d’un pont courbe, soit calculer le séisme sur un modèle droit, soit faire plusieurs calculs en variant les axes en fonction des biais des piles.
D.7.4.3 Validation du nombre de modes - Mode complémentaire
L’Eurocode 8 fixe un pourcentage minimum de masse à intéresser dans le calcul spectral.
Si l’on n’arrive pas à intéresser 90% de la masse, les logiciels permettent la prise en compte d’un mode complémentaire. C’est un mode fictif affecté de la masse non excitée par les modes étudiés et affecté de l’accélération spectrale associé au dernier mode étudié.
On a pu voir que négliger des modes fausse les résultats (cf. 1er exemple du D.7.2).
D.7.4.4 Calcul spectral et combinaisons CQC
Le calcul spectral permet d'obtenir les effets structurels (efforts, déplacements…) de chacun des modes. Puis, en fonction de la répartition statistique du séisme suivant les fréquences (définie par le spectre réglementaire), les effets sont combinés de manière à obtenir la réponse statistique de la structure à un séisme.
La combinaison des différents calculs modaux unitaires se fait selon le mode CQC ou SRSS, dont la définition théorique est fournie en Partie 1 – Chapitre 2.
Il convient de distinguer les spectres règlementaires utilisés en bâtiment (qui sont généralement des spectres de dimensionnement) et ceux utilisés pour les ponts (qui sont des spectres élastiques).
On passe du second au premier en divisant par un coefficient de comportement (égal ou supérieur à 1,5) qui tient compte des capacités de plastification de la structure. Les valeurs des coefficients de comportement sont définis par l'Eurocode 8.
Dans tous les calculs spectraux, il convient de veiller à bien définir l’amortissement de la structure. Selon les logiciels, on affecte l’amortissement aux modes ou aux matériaux. Dans le second cas, l’amortissement du mode dépendra de la participation de chaque matériau dans la déformée du mode considéré.
Attention, si l'on souhaite attribuer un amortissement dans les ressorts modélisant le sol, ceci correspond à une étude de type interaction sol-structure dynamique, et il n'est pas possible d'utiliser un spectre de dimensionnement mais uniquement un spectre élastique.
Enfin, comme indiqué en C16.8, un coefficient de comportement différent peut être affecté à chaque direction.
Après les combinaisons CQC ou SRSS (qui combinent les modes), il faut faire les combinaisons de Newmark (combinaisons de direction de séisme), puis les combinaisons d'actions.
D.7.4.5 Vérification des réactions d’appuis sous cas élémentaires
Il faut dans un premier temps faire le bilan des réactions d’appuis des cas sismiques élémentaires EX EY EZ et les comparer aux masses totales.
La vérification des réactions d’appuis ne peut se faire qu’en signant les modes.
Pour un bâtiment fondé sur radier ou sur semelles filantes, il est important de limiter les décollements des appuis, en effet le calcul élastique fait apparaitre des tractions dans les appuis qui n’existent pas dans la réalité car les fondations se soulèvent.
Les réactions d’appuis négatives (entourées en rouge) ne peuvent pas exister car les fondations se soulèvent dans la réalité, la répartition réelle des contraintes sur le sol est donc différente de celle calculée (cf. C16.8.3).
Réactions d’appuis d’un bâtiment sous fondations superficielles
Il est admis de considérer les modélisations « élastiques » représentatives si les soulèvements sont limités : la limite est prise égale à 30% dans le cas général (voire 10% dans le cas de bâtiment nucléaire)
Lorsque les décollements sont importants, il faut procéder à des calculs sismiques non-linéaires beaucoup plus complexes. Cette vérification de non soulèvement du bâtiment doit être réalisée avec soin :
-
il est nécessaire de signer les modes en fonction des modes principaux car les réactions d’appuis CQC sont toujours positives.
Réactions d’appuis CQC / Réactions d’appuis CQC signées
Les combinaisons sismiques (CP + E) n’ont aucun sens si les efforts sismiques E sont tous positifs, alors que les charges permanentes CP sont soit positives soit négatives.
-
Il est nécessaire d’étudier séparément toutes les combinaisons de Newmark
Exemple des 24 combinaisons de Newmark pour le bâti courant :
-
CP +/- 1.0 EX +/- 0.3 EY +/- 0.3 EZ
-
CP +/- 0.3 EX +/- 1.0 EY +/- 0.3 EZ
-
CP +/- 0.3 EX +/- 0.3 EY +/- 1.0 EZ
D.7.5 Calculs dynamiques autres que sismiques
Ce paragraphe concerne les calculs dynamiques autres que des calculs modaux spectraux (par exemple vibration d’un ouvrage ferroviaire ou d’une passerelle piétonne en vue de vérifier des critères de confort), et correspond à des calculs dans lesquels le chargement et la structure sont calculés avec une évolution dans le temps.
D.7.5.1 Vérification du comportement en vibrations libres ou à la résonance
Dans le cas d’une étude de confort d’un ouvrage ferroviaire ou d’une passerelle, il convient de rechercher les cas de charges pouvant provoquer une mise en résonance de la structure et les conséquences d’une telle mise en résonance. Pour cela, il est donc nécessaire d’appliquer des chargements périodiques pouvant provoquer ces mises en résonances.
Pour rappel, la résonance de la structure intervient quand le chargement périodique est à une fréquence identique à l’une des fréquences propres de la structure.
Pour vérifier que les fréquences des chargements périodiques appliqués sont cohérentes avec celles de la structure, on peut aisément les retrouver sur les graphiques temporels obtenus a posteriori. Cette méthode s’applique sur l’évolution temporelle de l’accélération, de la vitesse ou du déplacement d’un nœud représentatif (par exemple le milieu d’une poutre).
Pour cela, il suffit d’effectuer un décompte du nombre de périodes entre deux points éloignés dans le temps et de diviser ce nombre par le temps séparant ces deux points. Cela donne une assez bonne approximation de la fréquence de vibration du nœud en question:
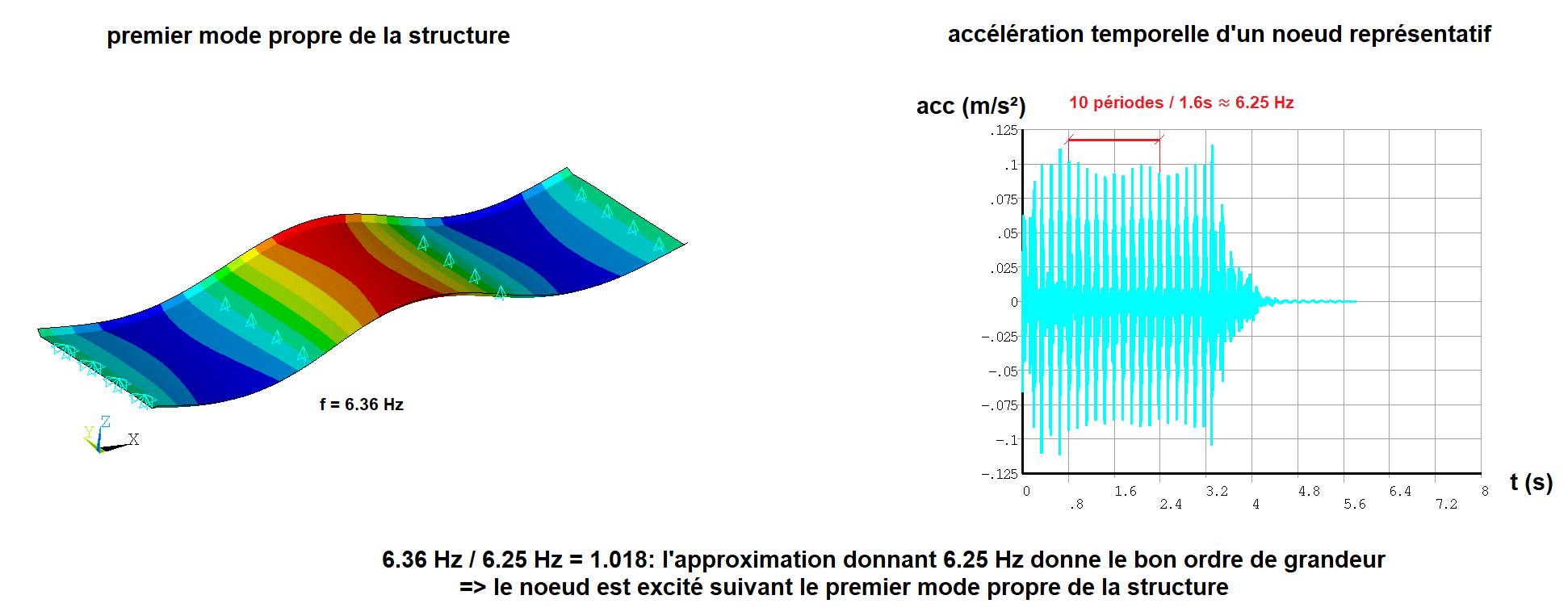
Si la courbe présente une variation périodique très marquée sur la période de temps où le chargement est appliqué, cela correspond à une vibration forcée de la structure, et la méthode décrite précédemment permet de s’assurer que la fréquence du chargement est bien celle attendue.
Si la courbe présente cette variation périodique sur un laps de temps postérieur au chargement (le calcul a été continué après avoir cessé d’appliquer le chargement), cela correspond aux vibrations libres de la structure. La méthode décrite précédemment permet, dans ce cas d’estimer, la principale fréquence propre de la structure et donc de s’assurer que le mode propre excité est bien le bon.
$translationBooksChapitre E. Comment assurer la qualité ?
Chapitre E. Comment assurer la qualité ?
Nous proposons ci-dessous quelques conseils simples pour déployer une démarche qualité dans les calculs aux éléments finis. Les enjeux principaux sont :
-
La bonne utilisation du logiciel
-
La modélisation appropriée du comportement des structures
-
La traçabilité des hypothèses de modélisation et des résultats.
Les conseils ci-dessous traitent de la bonne prise en main d’un logiciel par un ingénieur ou une équipe, des tests d’autocontrôle que doit impérativement effectuer chaque ingénieur à la fin de sa modélisation, et enfin des éléments minimaux à tracer pour permettre le travail à plusieurs ou la reprise ultérieure d’un modèle.
E.1 Prise en main d’un nouveau logiciel
E.2 Validation d’un modèle par autocontrôle
E.3 Traçabilité et travail à plusieurs
$translationBooksE.1 Prise en main d’un nouveau logiciel
E.1 Prise en main d’un nouveau logiciel
Nous proposons ci-dessous quelques conseils simples pour déployer une démarche qualité dans les calculs aux éléments finis. Les enjeux principaux sont :
-
la bonne utilisation du logiciel ;
-
la modélisation appropriée du comportement des structures ;
-
la traçabilité des hypothèses de modélisation et des résultats.
Les conseils ci-dessous traitent de la bonne prise en main d’un logiciel par un ingénieur ou une équipe, des tests d’autocontrôle que doit impérativement effectuer chaque ingénieur à la fin de sa modélisation, et enfin des éléments minimaux à tracer pour permettre le travail à plusieurs ou la reprise ultérieure d’un modèle.
E.1 Prise en main d’un nouveau logiciel
Lors de l’achat d’un nouveau logiciel au sein d’un bureau d’études, ou à l’occasion de l’arrivée de nouveaux ingénieurs, il y a une étape très importante - et malheureusement souvent négligée – celle de l’appropriation du logiciel et de la validation du couple utilisateur-logiciel.
Cette validation, à placer sous le responsabilité du management, est au cœur de la démarche qualité des études qui seront produites. On a vu, dans les paragraphes précédents, toutes les erreurs possibles liées à la méconnaissance du fonctionnement du logiciel, aussi bien au cours de la modélisation qu’au moment de l’exploitation des résultats.
Des outils existent pour accompagner cette phase de validation. On citera notamment le “Guide de validation des progiciels de calcul de structures” publié par l'AFNOR 1990 (ISBN 2-12-486611-7). Ce guide, établi initialement pour la validation des logiciels pour les développeurs, fournit une base de données de test et d’exemples simples de modélisation, accompagnés des résultats corrects.
Il est conseillé de choisir quelques tests dans cette base de données, de les distribuer comme exercice à l’équipe et de partager les résultats, bons ou mauvais, de ces tests pour que chacun comprenne bien comment le logiciel fonctionne, les options prises par défaut et les pièges à éviter.
$translationBooksE.2 Validation d’un modèle par autocontrôle
E.2 Validation d’un modèle par autocontrôle
Avant d’exploiter les résultats du modèle, il convient de procéder à plusieurs vérifications portant sur :
-
les données d'entrée ;
-
le comportement du modèle soumis à des sollicitations et à des conditions cinématiques élémentaires ;
-
les capacités du modèle et du logiciel à fournir des résultats satisfaisants et exploitables.
Si certains de ces points s’avèrent redondants pour celui qui a lui-même réalisé la modélisation (voir paragraphe précédent), ils sont essentiels dans le cas de l’exploitation d’une modélisation réalisée par une tierce personne.
Si l’objectif final de l’étude globale est d’effectuer des calculs non linéaires (non-linéarités géométriques, loi de comportement de matériaux non-linéaires … ), cette validation s’avère primordiale car elle peut éviter l’exécution inutile de longs calculs. Ceci est d'autant plus vrai que l’obtention d’une solution acceptable pour un problème complexe à résoudre est rarement immédiate.
De manière générale, la réalisation d'un petit modèle simplifié à l'aide de barres permet de valider rapidement certains ordres de grandeur de valeurs issues d'un modèle EF. Voir à cet égard l'exemple de la tour IGH (modèle brochette): Exemple A - Immeuble de Grande Hauteur (partie C).
On s'astreindra aussi à vérifier le modèle au fur et à mesure de l'avancement du modèle, en particulier sous le cas de charge poids propre. On voit trop souvent des ingénieurs se lancer dans une modélisation de plusieurs semaines puis buter sur des messages d'erreurs multiples. Il est loisible également de sauvegarder les fichiers de données intermédiaires au long de la journée, en incrémentant le nom du fichier, de manière à pouvoir revenir à une version précédente très facilement (celle qui fonctionnait avant les derniers ajouts).
Cette approche permettra aussi d'évaluer les temps nécessaires à la génération du modèle, de calcul et d'affichage des résultats.
Quelques points de contrôle importants sont présentés ci-après. Cette liste n’est ni limitative, ni exhaustive. Pour des problèmes spécifiques, d’autres points de contrôle peuvent être envisagés.
E.2.1 Premières vérifications du modèle
Avant toute exécution des calculs, il est nécessaire de procéder à des vérifications de base.
Ces contrôles peuvent paraître fastidieux mais la détection d’erreurs, souvent basiques, peut faire gagner beaucoup de temps au final.
a) Contrôle de la géométrie du modèle
De simples contrôles graphiques permettent généralement de faire apparaître des incohérences sur les caractéristiques géométriques des éléments.
Certains logiciels permettent de visualiser les éléments avec leur vraie section. Cette possibilité est particulièrement intéressante pour les éléments de type poutres car elle permet de contrôler de visu la bonne orientation des axes principaux et la position adéquate de l’axe longitudinal qui servira de référence pour la mise en place du chargement par exemple.
La liaison des éléments, la bonne connexion des coques et les conditions aux limites font partie intégrante de la vérification géométrique. Le contrôle visuel des repère locaux avant application des charges locales, également.
b) Caractéristiques des éléments
Pour des éléments de type poutres, certains logiciels peuvent proposer des profilés prédéfinis. Lors de la toute première utilisation d’un tel élément, il convient de vérifier que les caractéristiques affichées par le logiciel correspondent bien à la géométrie ; comparer ces caractéristiques avec celles fournies par les catalogues dans le cas de profilés standard ou procéder à des calculs manuels approchés des caractéristiques pour des sections non standard.
Pour une section définie par son contour, les surfaces et inerties calculées par le logiciel doivent être vérifiées.
Pour les problèmes courbes ou avec des charges excentrées, il est important de vérifier la position du centre de torsion des poutres et de vérifier si le logiciel tient compte ou non d'un décalage éventuel entre centre de gravité et centre de torsion.
c) Pour les caractéristiques des matériaux, une relecture des données est nécessaire.
Dans le cas d’un modèle mono-matériau, une erreur sur le module de Young peut affecter les résultats des déformations sans avoir d'impact sur les efforts. Alors que dans le cas d’un modèle multi-matériaux, une erreur sur l’un des modules influencera l’ensemble des résultats.
d) Comparaison par rapport aux versions antérieures
Quand on dispose d’un modèle simplifié, issu d’une phase antérieure, ou que l’on fait une modification sur un modèle, on doit systématiquement recontrôler certaines grandeurs principales pour détecter d’éventuelles erreurs.
e) Caractéristiques des charges
Pour les charges, une relecture des données s’avère également nécessaire.
Il s’agit de visualiser l’ensemble des charges appliquées au modèle et ce pour chacun des cas de charge définis.
Les valeurs de charges doivent être correctement identifiées ; valeurs caractéristiques ou valeurs pondérées. L’orientation et la direction de ces charges doivent aussi être vérifiées.
Si le modèle contient plusieurs cas de charge, il convient d’observer s’il s’agit de cas de charges indépendants ou successifs.
Pour les études dynamiques, une vérification des masses du modèle, dans toutes les directions est indispensable.
E.2.2 Vérifications de base de résultats de calcul
Cette étape se base sur des approches simplifiées statiques linéaires.
Pour chaque calcul réalisé, des vérifications de base doivent être effectuées. Ces vérifications, en plus de participer à la validation du modèle, permettront également, pour un débutant, de se familiariser avec le post-processeur du logiciel utilisé et de vérifier que les différentes options des éléments et/ou des calculs ont été activées correctement.
a) Déformée – Ordre de grandeur des résultats
L’allure générale de la déformée est très explicite puisqu’elle donne une réponse immédiate sur le comportement de la structure à une sollicitation donnée. Elle permet de valider les hypothèses sur le schéma statique mis en place (appui simple, encastrement, …) et sur la modélisation des assemblages.
Attention aux facteurs d’amplification graphique, qui peuvent induire en erreur sur des déplacements locaux (imposer un facteur de 1 pour vérifier d’éventuelles incohérences).
En élasticité linéaire, les ordres de grandeur des déplacements doivent être satisfaisants. Leur amplitude doit être faible vis-à-vis des dimensions de la structure.
b) Descente de charges
L’équilibre statique doit être vérifié. On peut calculer manuellement les résultantes des charges appliquées dans le modèle et les comparer aux composantes de la somme des réactions d’appui affichée par le logiciel.
La répartition et la direction des réactions sur les différents appuis doivent être analysées par rapport aux degrés de liberté bloqués.
La présence d’une réaction nulle pour un degré de liberté bloqué doit être analysée. Il s’agira généralement d’un effet de symétrie.
E.2.3 Tests sur les liaisons et les assemblages
a) Réactions d’appui nulles ou non-nulles
Les réactions d’appui doivent correspondre au schéma statique.
Le signe doit également être contrôlé et permet de détecter des erreurs de référentiel pour les cas de charges.
b) Modélisation d’un assemblage
Le calcul général n’affranchit pas d’une analyse locale (et manuelle) par exemple avec un chargement à proximité d’un assemblage pour vérifier que les transferts des efforts se font de la manière attendue.
E.2.4 Tests de sensibilité sur des points spécifiques de la modélisation
On doit s’interroger quand la modélisation produit un effet (global ou local) qui varie beaucoup quand les données d’entrée évoluent. On serait alors en présence d’une instabilité de modèle.
$translationBooksE.3 Traçabilité et travail à plusieurs
E.3 Traçabilité et travail à plusieurs
S’il existe des projets où un seul ingénieur assurera l’ensemble des calculs, de bout en bout et à toutes les phases, la plupart du temps, le travail est réparti entre plusieurs personnes. Ceci nécessite de mettre en place une méthodologie particulière, décrite ci-dessous. Et même quand l’ingénieur est seul, ces éléments participent à la démarche de qualité globale et permettent de garder la mémoire du travail accompli.
E.3.1 Transmission / traçabilité / archivage
Pour le bon fonctionnement d’un projet, il est indispensable que toute modélisation puisse être transmise à une autre personne ayant les compétences requises pour l’exploiter sans perdre de temps à essayer de comprendre ce qui a été réalisé.
Pour permettre la transmission du modèle EF, et sans redéfinir les notions classiques de qualité (stockage des fichiers dans un dossier bien défini, nom de fichier explicite par rapport à la version valide du modèle), il est nécessaire de tracer par ailleurs précisément ce qui a été modélisé (dans une note de modélisation si possible, mais à défaut dans un texte simplifié qu’on peut aisément retrouver), qui listera au moins les données suivantes :
-
le logiciel utilisé ;
-
le type d’éléments employés ;
-
les caractéristiques de matériaux considérés ;
-
le principe de modélisation des appuis ;
-
la représentation par croquis des grands principes de la modélisation géométrique (simplifications effectuées notamment);
-
le principe de numérotation des nœuds et des éléments ;
-
les chargements appliqués ;
-
les calculs effectués ;
-
les combinaisons réalisées.
En cas de modifications des modèles au fur et à mesure des projets, il est nécessaire de s’astreindre à noter les modifications effectuées à chaque étape pour pouvoir retrouver les effets de telle ou telle modification sur les résultats obtenus et de sauvegarder les modèles intermédiaires qui ont servi. Il faut les ranger et les identifier. On se méfiera des noms qui à l'instant t semblent vouloir dire quelque choses et qui 6 mois plus tard ne sont plus compréhensibles (“test_appui_2_z_souplesse”, par exemple).
Dans le cas de programmes fonctionnant par lignes de codes, voir le paragraphe suivant.
E.3.2 Code bien écrit et commenté
Dans le cas d’un modèle monté directement dans l’interface, l’utilisateur n’a pas accès à toute la démarche de construction du modèle.
A l’inverse, dans le cas de programmes EF fonctionnant par lignes de codes, on pourra avantageusement tirer profit des options qui tracent toute la démarche de construction du modèle. Cela permet de retrouver tout le raisonnement et de comprendre comment le logiciel a créé pas à pas les différentes parties de la structure et les chargements.
Il est nécessaire d’utiliser au maximum les options de commentaires pour expliciter chaque ligne de code ou groupe de lignes de code, pour retrouver rapidement les données spécifiques que l’on recherche dans le modèle et pour qu’une personne ne connaissant pas parfaitement le langage du logiciel puisse au moins cerner les grands principes de la modélisation.
E.3.3 Réflexion sur le BIM
Le BIM (Building Information Modeling) est actuellement une nouvelle méthode de travail s’appliquant aux différents métiers de la construction. Cette approche vise à interconnecter les différents métiers pour créer une maquette unique issus de multiples fichiers.
La connexion des modèles de calculs aux modèles géométriques commence à être développée par les éditeurs de logiciel.
Néanmoins, il convient d’être vigilant et de ne pas prendre pour argent comptant toutes les options présentées comme automatiques. En effet, la modélisation EF se fonde sur une approche d’ingénieur, pour ne modéliser que ce qui est utile et nécessaire, alors que la modélisation géométrique vise à fournir des informations complémentaires inutiles pour le dimensionnement mécanique.
Le modèle géométrique est créé pour présenter des plans et vues 3D d’une structure, ainsi que les interfaces entre la structure et les équipements, et pour détecter d’éventuels conflits en volume. Il n’est pas créé pour que les connexions des éléments soient mécaniquement correctes. Il ne distingue pas les éléments principaux structurels des éléments secondaires (non structurels) qui ne doivent pas être pris en compte. Il n’intègre aucune des simplifications décrites ci-avant et qui sont importantes pour bien appréhender le fonctionnement de la structure (par exemple le décalage de l’axe neutre d’élément successifs ou le retraitement pour obtenir les nœuds).
Ainsi l’utilisation de modèles EF issus automatiquement des modèles géométriques ne procure pas forcement un gain de temps en comparaison de la méthode classique, étant donnés la nécessité de contrôle exhaustif du modèle EF, d'une part, et le temps de reprise du modèle EF pour le rendre conforme aux objectifs voulus, d'autre part.
Ceci est vrai au moment où ces lignes sont rédigées, mais les éditeurs apportent chaque jours des améliorations à leurs produits, ce qui pourrait rendre caduque le texte précédent.
L’utilisation du BIM, dont l’objectif est de faciliter les échanges avec les autres métiers, ne doit en aucun cas faire perdre de vue que la modélisation EF est un autre métier, fondé sur la valeur ajoutée du regard de l’ingénieur.
En tout état de cause, l'usage du BIM pour obtenir un modèle compatible avec le calcul oblige à repenser la séquence traditionnelle de modélisation (ingénieur/projeteur), redéfinir les responsabilités vis-à-vis de l'information … ce qui conduit à définir des processus spécifiques pour le projet.
Exemple de structure dont le modèle de calcul est issu directement de la maquette BIM:
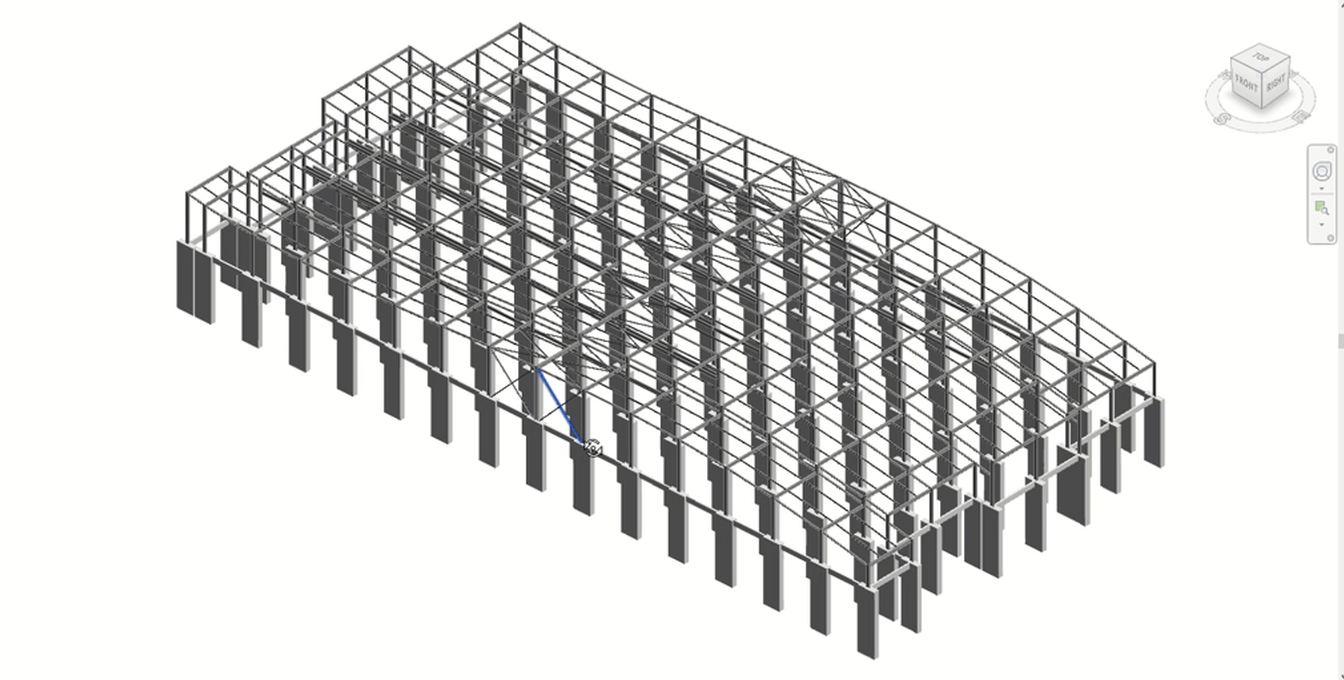
Maquette BIM
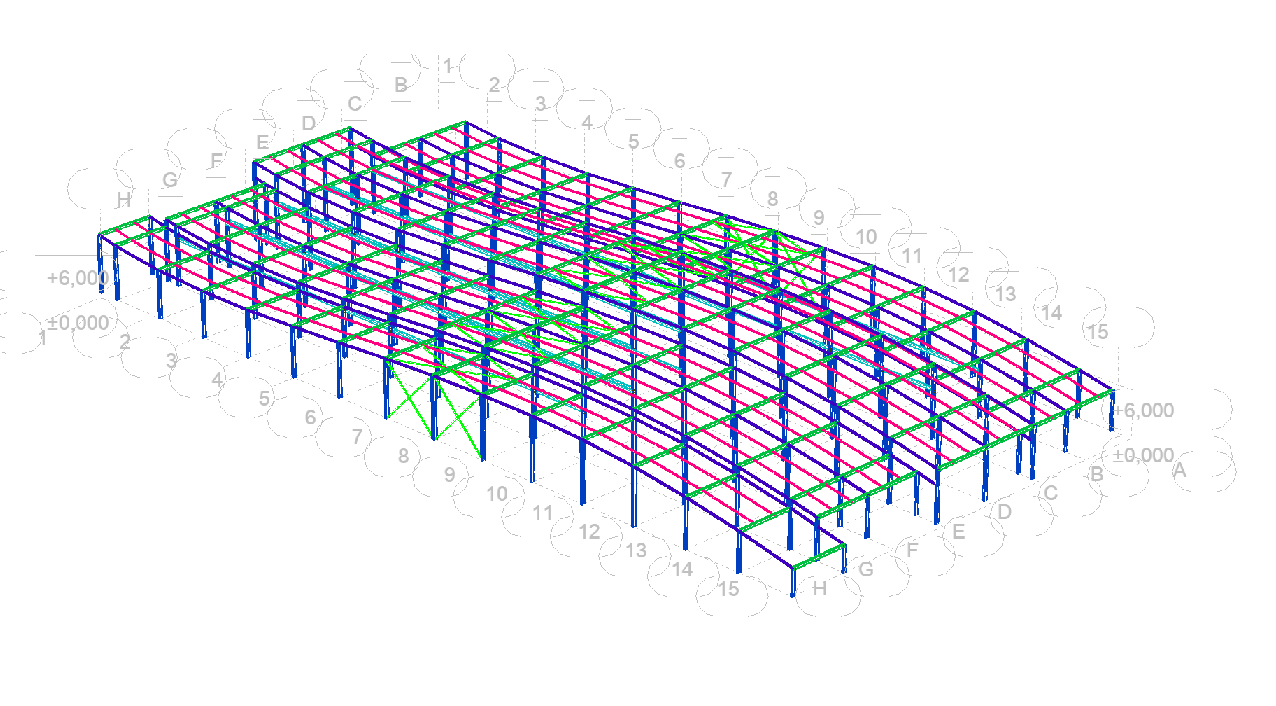
Modèle EF issu de la maquette BIM
$translationBooksChapitre F. Comment bien présenter la note de calcul aux éléments finis ?
Chapitre F. Comment bien présenter la note de calcul aux éléments finis ?
Le présent paragraphe fournit les éléments minimaux qui doivent figurer dans une note, si l’on veut fournir une description claire d’un modèle de calcul aux éléments finis.
F. Comment bien présenter la note de calcul aux éléments finis ?
$translationBooksF. Comment bien présenter la note de calcul aux éléments finis ?
F. Comment bien présenter la note de calcul aux éléments finis ?
Le présent paragraphe fournit les éléments minimaux qui doivent figurer dans une note, si l’on veut fournir une description claire d’un modèle de calcul aux éléments finis.
Avant toute chose, la note de modélisation ne peut être la première note du projet. Elle est soit précédée soit accompagnée de la note d’hypothèses générales. La note d’hypothèses générales fournit des informations indispensables sur les matériaux, sur les raideurs des fondations, sur les cas de charges et combinaisons et sur l’ensemble des justifications qu’il va falloir mener sur la structure. Idéalement, les deux notes sont rédigées en parallèle.
Trop souvent des points qui auraient toute leur place dans la note d'hypothèse ou dans la note de modélisation sont reportés à une note ultérieure. Cette façon de faire est dommageable dans la mesure où les éclaircissements arrivent ensuite avec une note “pavé” contenant les résultats et parfois même les justifications … générant des tensions avec le Maître d'Oeuvre en charge du VISA (ou le contrôleur) quand ce dernier exigera de compléter voire de refaire et surtout, des pertes de temps pour toutes les parties-prenantes.
Il est fondamental de comprendre qu'il y a un véritable effet de bras de levier en jeu et qu'il vaut mieux passer un peu de temps à détailler et fixer les éléments au départ et se les faire valider. Le déroulé de l'affaire s'en trouve grandement amélioré.
N'oublions pas que dans une mission VISA de base, la note d'hypothèses générales est la seule qui fera l'objet d'un examen approfondi par le Maître d'Oeuvre.
F.1 Introduction de la note - Description de l’objet du calcul
a) La note de calcul EF doit débuter par un bref rappel de l’objet étudié. Des extraits de plans sont toujours bienvenus.
b) Il faut également rappeler la phase d’étude. Si la phase d’étude est avancée, il est intéressant de rappeler comment le sujet a été traité aux phases précédentes. Parfois, un modèle plus simple a été développé à la phase précédente, parfois c’est un calcul à la main qui a été fait. Dans les deux cas, la note doit comparer les résultats du modèle simplifié et du modèle plus complet.
c) Il convient de préciser les objectifs du calcul, c’est-à-dire les justifications qu’on entend mener grâce à ce modèle : stabilité globale, efforts internes, déformations … Le modèle n’est pas un objectif en soi, il n’est qu’un outil pour obtenir un résultat.
d) Il n’est pas obligatoire d’utiliser un seul modèle pour toutes les justifications d’un projet. Préciser ce qui ne sera pas couvert par le modèle présent mais par un autre sous-modèle.
e) La note de modélisation doit déclarer toutes les références documentaires utilisées : les plans avec leur indice, les pièces du marché, les notes de calcul ou géotechniques.
f) En cas de mise à jour de modèle, les modifications apportées doivent être tracées de manière explicite.
g) La note doit décrire le principe d’exploitation des résultats, les sortants directs du logiciel et les éventuels post-traitements qui sont envisagés.
F.2 Description géométrique du modèle
a) Il convient de définir très clairement le périmètre physique de l’étude : les éléments qui sont modélisés et ceux qui ne le sont pas. Certaines structures secondaires n’ont souvent pas besoin d’être modélisées (escaliers ou passerelles de visite, équipements). Certaines structures principales peuvent être simplifiées comme les culées de pont ou les pieux, qui peuvent le cas échéant, être représentés par des appuis avec leur souplesse. En cas de succession d’ouvrages, les limites de modélisation doivent être décrites avec la façon de prendre en compte l’interaction avec les ouvrages adjacents non modélisés.
b) Les hypothèses de simplification de la géométrie, du choix des nœuds et des sections doivent être exposées dans le détail. La fourniture d’un listing complet du fichier de calcul ne peut pas répondre à cette demande. Il faut des schémas. Les croquis à la main, que l’ingénieur utilise quand il code, peuvent avantageusement être fournis. Ils permettent de comprendre la logique de modélisation.
c) S’il y a un échange entre le logiciel de dessin et le logiciel Eléments Finis, il est intéressant de l’indiquer.
d) Il faut expliciter toutes les unités utilisées : distances, efforts, contraintes et masses. Par défaut, on privilégiera le système S.I.
e) Il faut définir le repère global du modèle et rappeler la convention de signes des efforts pour toutes les réactions d’appui.
f) Il en va de même pour les éléments finis: il convient d'indiquer les repères locaux et les conventions de signes adoptées par le logiciel pour les efforts et contraintes. g) Les images et sorties graphiques sont intéressantes pour visualiser le modèle, mais elles doivent être annotées et accompagnées des explications correspondantes. Une note de modélisation constituée d’une série de copies d’écran n’est pas acceptable.
F.3 Description des éléments finis
a) Comme évoqué au chapitre B, le choix du logiciel dépend de nombreux critères. Il faut expliquer, même de manière succincte, pourquoi le logiciel utilisé est approprié. S’il a des limites de calcul, ne pas hésiter à l’écrire et à expliquer comment on va parer à ces limites.
b) Description des propriétés des EF : cette partie est souvent manquante dans la description, or certains logiciels ont une grande variété de types d’éléments qui n’ont pas les mêmes fonctionnalités. En particulier, pour les modélisations en plaque, les éléments prennent ou non en compte les effets membranaires, ce qui peut changer les résultats ; il en est de même en 1D pour la déformation à l’effort tranchant dans les poutres.
c) Il faut décrire le nombre de nœuds, la taille des éléments, le type de mailles. Si un test de raffinement de maillage a été mené (comme conseillé au paragraphe d), le signaler.
d) Pour un modèle à barres, il faut fournir un tableau des caractéristiques mécaniques des barres.
e) Il faut illustrer par des captures d’écran le lien entre le repère global et les repères locaux. La plupart des logiciels ont des modes d’affichage des repères assez explicites. A noter qu’il est souvent possible et utile de forcer les repères pour faciliter l’analyse des résultats.
f) Il est intéressant de donner le nombre d’éléments ainsi que le nombre de degrés de liberté du modèle.
F.4 Description mécanique du modèle
a) Les caractéristiques des matériaux doivent être exposées de manière complète : masse volumique, module de Young, coefficient de Poisson, loi de comportement statique, lois de retrait, de fluage ou de relaxation …
b) Les conditions aux limites doivent être correctement décrites. Le schéma statique doit être rappelé, avec la façon dont sont modélisés les appuis. Si une matrice de raideur est introduite, expliquer comment elle a été calibrée à partir des paramètres géotechniques.
c) En cas de présence d’appareils d’appui, préciser s’ils sont modélisés par des barres avec des caractéristiques particulières ou par des liaisons spéciales dans le modèle.
d) Il faut lister les éléments non structuraux (équipements) et préciser lesquels sont modélisés ou a contrario pris en compte comme des charges. Comme indiqué au c), ce choix dépend de la raideur et de la masse de ces éléments non structuraux.
e) Le mode d’introduction des efforts et des charges ne va pas de soi. Il faut préciser si le logiciel fait du placement automatique des charges, du positionnement incrémental des charges ou si les cas de charges sont rentrés manuellement.
f) En cas d’effort à introduire sur une coupure, il faut illustrer comment cet effort se diffuse dans le modèle (araignée reliant les bords de la coupure).
g) De manière générale, et en particulier pour les calculs sismiques ou dynamiques, il faut détailler comment sont introduites les masses dans le modèle. Si la masse des éléments est générée automatiquement par le logiciel, dans les zones d’assemblage, il y a des volumes comptés en double ; il faut donc pouvoir corriger les masses volumiques. Les éléments non structuraux modélisés par des cas de charge ne sont pas reconnus en tant que masses et doivent être ajoutés. Une vérification à la main de la masse globale du modèle est toujours utile et rassurante.
F.5 Démonstration de la démarche d’autocontrôle
L’autocontrôle est un élément fondamental de la qualité d’une modélisation.
Cette démarche d’autocontrôle doit être visible pour la personne qui va contrôler la note de calcul.
a) Les tests et éléments de vérification sur la validité du maillage doivent être mentionnés.
b) Tous les tests de validation du modèle qui ont été menés concourent à mettre en confiance le contrôleur. Il ne s’agit pas de fournir une grande quantité d’informations et de données, mais juste d’indiquer les tests qui ont été menés.
c) En revanche, les tests de vérification des descentes de charge sont absolument indispensables. Ils doivent a minima comprendre le poids propre structurel, le poids propre des équipements, une charge uniformément répartie et les cas de charges thermiques.
d) Ceci inclut également la vérification globale des masses pour les modèles dynamiques et sismiques.
F.6 Description de la récupération et du post-traitement des efforts
a) Il faut décrire sous quelle forme sont récupérés les efforts ou déplacements du modèle (listings, lecture graphique, affichage à l’écran).
b) Dans le cas où les résultats sont exprimés dans un repère local et qu’un changement de repère est nécessaire a posteriori, le risque d’erreur est fréquent. La validité du changement de base doit être démontrée.
c) De manière générale, il faut décrire le processus de post-traitement des efforts, avec les tests associés.
d) Pour les combinaisons et enveloppes, il faut dire si elles sont faites par post-traitement ou directement par le logiciel. Dans le second cas, il faut indiquer si les combinaisons sont formées à la main ou si elles sont automatiques (source d’erreur). Dans tous les cas, il faut préciser si les combinaisons et enveloppes génèrent des efforts concomitants ou non.
F.7 Présentations des résultats
Les résultats sont souvent présentés sous forme de tableaux, parfois lourds à décrypter.
a) Comme dit précédemment, le système d’unités doit être défini et il faut systématiquement indiquer les unités dans les colonnes de tableaux.
b) Il faut rappeler les descentes de charges pour les cas de charge élémentaires.
c) Il faut mettre en valeur (surligner, entourer ou mettre en gras ou en rouge) les valeurs dimensionnantes des tableaux.
d) Les listings de résultats ne doivent pas être dans le corps du texte. Ils alourdissent la compréhension du document et donnent lieu à des impressions inutiles. Ils seront placés en annexe.
F.8 Compléments spécifiques pour les éléments volumiques
a) Le choix des sections de coupe doit être cohérent avec l’exploitation attendue des résultats et doit coller aux plans critiques de l’ouvrage.
b) De la même manière que pour les éléments surfaciques, les logiciels proposent une grande variété d’éléments volumiques, avec des codes différents. Certains éléments sont très spécifiques à certains matériaux et certains types de calcul. Il faut se référer à la notice du logiciel pour choisir, sauf besoin très particulier, l’élément « le plus simple ».
c) Il convient de privilégier les résultats sous forme de cartographies, en mettant en valeur les points dimensionnants et en précisant si ce sont des valeurs lissées ou aux noeuds par exemple.
d) Dans le cas d’intégration des efforts sur une coupe, il est utile d'expliciter la méthode retenue.
F.9 Compléments spécifiques pour les calculs non-linéaires
a) Il faut fournir la loi de comportement utilisée, qui peut être différente de la loi standard du logiciel.
b) Il est intéressant de présenter, dans la note de calcul, l’évolution d'une grandeur remarquable (déplacement d'un point, effort spécifique, etc.) au cours de l'augmentation du chargement, pour visualiser une plastification.
F.10 Compléments spécifiques pour les calculs dynamiques
a) Si on utilise un spectre automatiquement fourni par le logiciel, il faut démontrer qu’on a vérifié que ce spectre est conforme à celui qu'on attend.
b) Il faut définir les amortissements retenus (qui ne sont pas les mêmes en dynamique et en sismique) et/ou les coefficients de comportement pour les calculs sismiques.
c) Il faut donner les masses participantes, les coefficients de participation des modes, mode par mode et préciser les combinaisons modales retenues ainsi que les signatures modales choisies, s’il y a lieu.
d) Il faut présenter les déformées modales pour les modes les plus représentatifs. La forme des modes est un élément important de vérification du comportement global de la structure.
e) Pour un calcul par pas de temps, comme pour le calcul non-linéaire, il est intéressant de présenter l'évolution temporelle des grandeurs représentatives (déplacements, accélérations)